ОГЛАВЛЕНИЕ
Стр.
1. Цель работы..................................................................................................................
2. Содержание работы......................................................................................................
3. Техническое и методическое обеспечение работы...................................................
4. Кинематическая схема робота……………………………………………………….
5. Индивидуальные задания …………………… …………………………………….
6. Результаты выполнения работы………………….....................................................
7. Используемая литература…………………………………………............................
ЦЕЛЬ РАБОТЫ
Целью работы является: Ознакомление с принципами метрологической аттестации промышленных роботов (ПР) на основе:
- исследования погрешностей позиционирования прецизионного промышленного робота LRMate200iD (фирма FANUK);
- расчета погрешностей позиционирования манипулятора робота в зависимости от типа подшипников, устанавливаемых в подшипниковые узлы подвижных сочленений звеньев
манипулятора робота.
Учебная дисциплина: «Технология испытаний и сертификация средств
информационно-вычислительной техники»
СОДЕРЖАНИЕ РАБОТЫ
Включает:
1) ознакомление с роботом LRMate200iD (фирма FANUK);
2) выполнение работы по исследованиею точности позиционирования манипулятора робота;
3) оформление результатов исследования и защиту результатов работы.
ТЕХНИЧЕСКОЕ И МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
РАБОТЫ
Включает:
1) Прецизионный промыщленный робот LRMate200iD (фирма FANUK) с комплектом управляющей аппаратуры;
КИНЕМАТИЧЕСКАЯ СХЕМА РОБОТА
(LRMate200iD /фирма FANUK/)
4.1. Внешний вид робота представлен на рис.1.
| Манипулятор робота |
| а) |
| б) |
| Контроллер управления |
| Рис.1. |
| Пульт ручного управления (программирования /«обучения»/ робота) |
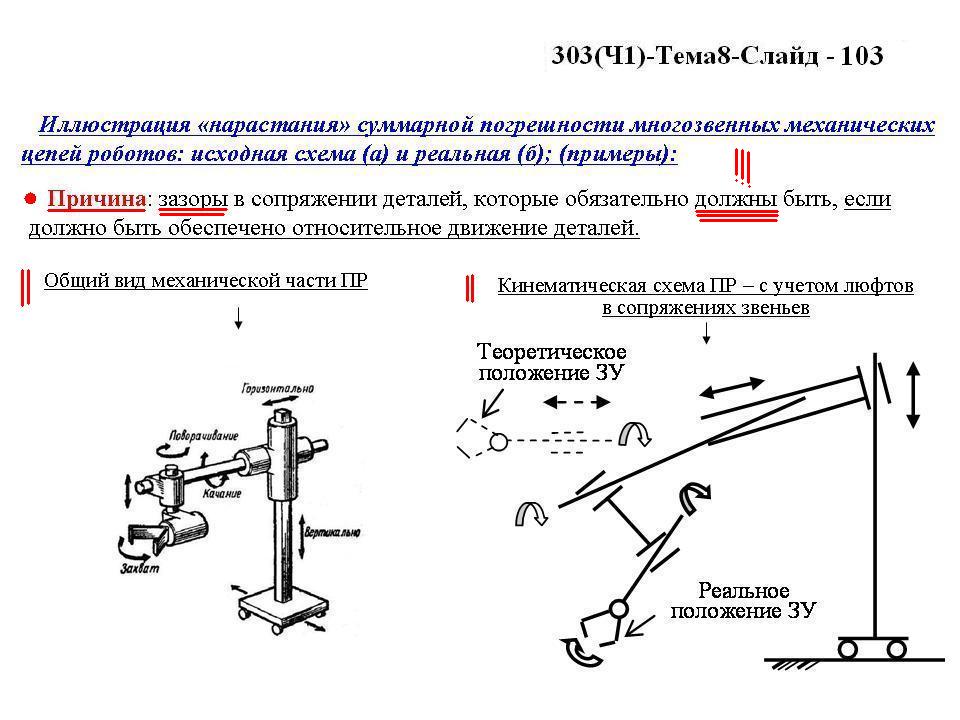
4.2 Принцип появления погрешностей позиционирования манипуляторов промышленных роботов иллюстрируется на рис.2 (пример).
|
| Рис.2. |
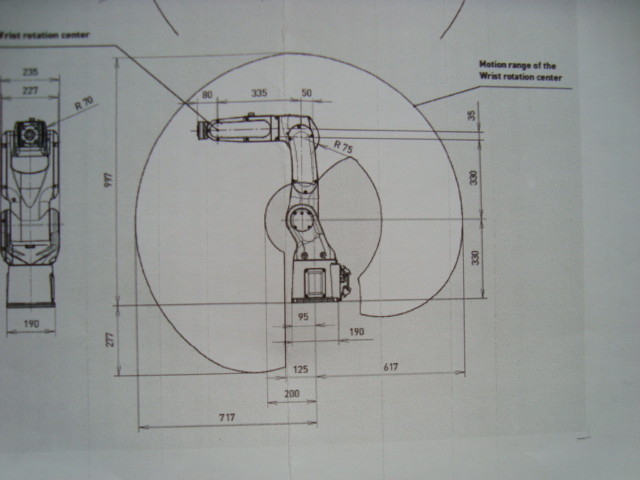
4.3. Основные размеры манипулятора робота, модель: LRMate200iD, рис.3.
| Рис.3. |
| 4.5.Иллюстрация погрешностей подшипников качения |
| 4.4. Схема расчета погрешностей кинематики робота LRMate200iD (фирма FANUK) (вследствие радиальных и осевых смещений колец подшипников) |
| Рис.4. |
|
| 4.4. Кинематическая схема робота LRMate200iD |
| J6 |
| J5 |
| J4 |
| J3 |
| J2 |
| J1 |
| ∆р(6) |
| ∆р(5) |
| ∆р(4) |
| ∆р(3) |
| ∆о(1) |
| ∆р(2) |
| z |
| x |
| y |
| Наружное кольцо подшипника |
| Внутреннее кольцо подшипника |
| Радиальный зазор и радиальное биение дорожек качения подшипника |
| Осевой зазор и осевое биение дорожек качения подшипника |
| Рис.5. |
| Иллюстрация перекоса горизонтальных осей манипулятора по вертикали |
Перекос положений осей манипулятора от погрешностей подшипников - люфтов (л) и радиальных биений (р) колец:

|
| Lг0 – расстояние между подшипниками (по горизонтали) |
Погрешность позиционирования манипулятора в вертикальной плоскости от погрешностей
подшипников - люфтов (л)+ радиальных биении (р) колец:

|
Погрешность позиционирования манипулятора в горизонтальной плоскости от погрешностей
подшипников – люфтов (л) + радиальных биений (р) колец:

|
Перекос положений осей манипулятора от
погрешностей подшипников - люфтов (л) и радиальных
биений (р) колец:

|
| Lв0 – расстояние между подшипниками (по вертикали) |
| Расчет погрешностей позиционирования манипулятора в зависимости от погрешностей подшипников: радиальных(р) и осевых (о) биений колец |
| L гmax – максимальное расстояние (по горизонтали) до плоскости оценки погрешностей манипулятора по вертикали |
| Lвmax – максимальное расстояние (по вертикали) до плоскости оценки погрешностей манипулятора по горизонтали |
| Иллюстрация перекоса вертикальных осей манипулятора по вертикали |
| Примечание: л-люфт р – радиальное биение |
| J1 |
| J6 |
| J5 |
| J4 |
| J3 |
| J2 |
| ∆р(6) |
| ∆р(5) |
| ∆р(4) |
| ∆р(3) |
| ∆о(1) |
| ∆р(2) |
| z |
| x |
| y |
| Иллюстрация перекоса горизонтальных осей манипулятора по вертикали |
| Перекос положений осей манипулятора от погрешностей подшипников - люфтов (л) и радиальных биений (р) колец:
|
| Lг подш – расстояние между подшипниками (по горизонтали) |
| Погрешность позиционирования манипулятора в вертикальной плоскости от погрешностей
подшипников - люфтов (л)+ радиальных биении (р) колец:
|
| Погрешность позиционирования манипулятора в горизонтальной плоскости от погрешностей
подшипников – люфтов (л) + радиальных биений (р) колец:
|
| Перекос положений осей манипулятора от
погрешностей подшипников - люфтов (л) и радиальных
биений (р) колец:
|
| Lв подш – расстояние между подшипниками (по вертикали) |
| Расчет погрешностей позиционирования манипулятора в зависимости от погрешностей подшипников: радиальных(р) и осевых (о) биений колец |
| L гmax – максимальное расстояние (по горизонтали) до плоскости оценки погрешностей манипулятора по вертикали |
| Lвmax – максимальное расстояние (по вертикали) до плоскости оценки погрешностей манипулятора по горизонтали |
| Иллюстрация перекоса вертикальных осей манипулятора по вертикали |
| J1 |
| J6 |
| J5 |
| J4 |
| J3 |
| J2 |
| ∆р(6) |
| ∆р(5) |
| ∆р(4) |
| ∆р(3) |
| ∆о(1) |
| ∆р(2) |
| z |
| x |
| y |
| Lвподш – расстояние между подшипниками (по вертикали) = 100 /мм/ |
| Примечание: л-люфт р – радиальное биение |
| Lгподш – расстояние между подшипниками (по горизонтали) = 200 /мм/ |
| L гmax – максимальное расстояние (по горизонтали) до плоскости оценки погрешностей манипулятора по вертикали = 600 /мм/ |
| Lвmax – максимальное расстояние (по вертикали) до плоскости оценки погрешностей манипулятора по горизонтали = 550 /мм/ |
| Рис.6. |
| 4.6. Формулы вычисления погрешностей робота вследствие радиальных и осевых смещений колец подшипников (для схемы рис. 4) |
| в) |
| = + + + + + |
| = + + + + + |
| = + + + + + |
| ∆x∑ |
| ∆р(1) |
| ∆р(2) |
| ∆р(3) |
| ∆о(4) |
| ∆р(5) |
| ∆о(6) |
| ∆z∑ |
| ∆р(1) |
| ∆о(2 ) |
| ∆о(3 ) |
| ∆р(4) |
| ∆о(5) |
| ∆р(6) |
| ∆y∑ |
| ∆о(1) |
| ∆р(2) |
| ∆р(3) |
| ∆р(4) |
| ∆р(5) |
| ∆р(6) |
| Примечание: р – радиальные смещения; о – осевые смещения |
| 4.7. Формулы вычисления погрешностей робота вследствие перекосов колец подшипников из-за люфтов и радиальных биений колец (для схемы рис. 6) |


| 4.8. Формулы вычисления суммарных погрешностей позиционирования манипулятора робота вследствие погрешностей колец подшипников (люфтов, радиальных и осевых биений колец |

|

|
|
|
|
ИНДИВИДУАЛЬНЫЕ ЗАДАНИЯ
I.Рассчитать: суммарную погрешность (на конце схвата) манипулятора робота
в исходном положении (см. рис. 6 в тексте);
II. Исходные данные: внутренние диаметры подшипников (наружные диаметры валов
подшипниковых узлов);
III. Тип подшипников: шариковые или роликовые (на выбор студентов);
IV. Классы точности (степень, квалитет /на выбор студентов/): все (по вариантам);
V. Варианты: (диаметры валов по осям манипулятора робота LRMate200iD (каф. 307):
…)
…)
1)
J1= 125/мм/; J2= 100/мм/; J3= 75 /мм/; J4= 50/мм/; J5= 45/мм/; J6= 15 /мм/;
2)
J1= 120/мм/; J2= 95/мм/; J3= 70 /мм/; J4= 45/мм/; J5= 40 /мм/; J6= 15 /мм/;
3)
J1= 115/мм/; J2= 90/мм/; J3= 65 /мм/; J4= 40/мм/; J5= 35 /мм/; J6= 15 /мм/;
4)
J1= 110/мм/; J2= 85 /мм/; J3= 60 /мм/; J4= 35 /мм/; J5= 30 /мм/; J6= 15 /мм/;
5)
J1= 105/мм/; J2= 80 /мм/; J3= 55 /мм/; J4= 30 /мм/; J5= 25 /мм/; J6= 15/мм/;
6)
J1= 100 /мм/; J2= 75 /мм/; J3= 50 /мм/; J4= 25 /мм/; J5= 20 /мм/; J6= 10 /мм/;
7)
J1= 95 /мм/; J2= 70 /мм/; J3= 45 /мм/; J4= 20 /мм/; J5= 15 /мм/; J6= 10 /мм/;
8)
J1= 90 /мм/; J2= 65 /мм/; J3= 40 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
9)
J1= 85 /мм/; J2= 60 /мм/; J3= 35 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
10)
J1= 80 /мм/; J2= 55 /мм/; J3= 30 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
11)
J1= 75 /мм/; J2= 50 /мм/; J3= 25 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
12)
J1= 70 /мм/; J2= 45 /мм/; J3= 20 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
13)
J1= 65 /мм/; J2= 40 /мм/; J3= 20 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
14)
J1= 60 /мм/; J2= 35 /мм/; J3= 20 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
15)
J1= 55 /мм/; J2= 30 /мм/; J3= 20 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
16)
J1= 50 /мм/; J2= 25 /мм/; J3= 20 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
17)
J1= 45 /мм/; J2= 25 /мм/; J3= 20 /мм/; J4= 15 /мм/; J5= 10 /мм/; J6= 10 /мм/;
…)
…)
…)
…)
…)
…)