Введение
Одной из важных задач развития народного хозяйства является внедрение комплексной механизации производственных процессов, неуклонные сокращения во всех отраслях численности работников занятых ручным трудом, особенно на вспомогательных и подсобных работах.
Значительная роль в решении этих задач принадлежит подъемно транспортным механизмам. Существенное сокращение тяжелого труда при перегрузочных работах осуществляется, главным образом, путем автоматизации грузозахватных операции, а также автоматизации процессов управления подъемно транспортными машинами. Так как эти задачи решаются с помощью электропривода, то значение совершенствования и внедрения современных электроприводов постоянно возрастает.
Первостепенное значение для автоматизации имеют многодвигательный электропривод и средство электрического управления. Развитие электропривода идет по пути упрощения механических передач и приближения электродвигателей к рабочим органам механизмов, а также возрастающего применения электрического регулирования скорости электроприводов.
1.1 Назначение и устройство механизма
Кранами называются грузоподъемные устройства, служащие для вертикального и горизонтального перемещения грузов на небольшие расстояния.
В цехах промышленных предприятий наибольшее распространение получили мостовые краны, с помощью которых производится подъем и опускание тяжелых заготовок, деталей и узлов машин, а также их перемещение вдоль и поперек цеха.
Тележка с подъемной лебедкой перемещается на колесах, приводимых во вращение электродвигателем через редуктор, по рельсам, проложенных вдоль моста.
Для подвода питания к электрооборудованию, размещенному на тележке, служат вспомогательные троллеи, идущие вдоль моста.
Так как двигатели обычно имеют угловую скорость, значительно большую, чем скорость ходовых колес тележки, то движение к рабочим органам тележки передается через редукторы.

Рис.1 Кинематическая схема тележки
1.2 Требования к электроприводу
Для выбора системы электропривода необходимо четко представлять технологические требования к приводу того механизма, для которого он выбирается.
Для качественного выполнения перемещения грузов электрический привод мостовых кранов должен удовлетворять следующим основным требованиям:
1. Регулирование угловой скорости двигателя в сравнительно широких пределах.
2. Обеспечение необходимой жесткости механической характеристики привода.
3. Ограничение ускорений до допустимых пределов при минимальной длительности переходных процессов.
4. Реверсирование электропривода и обеспечение его работы, как в двигательном, так и в тормозном режиме.
1.3 Исходные данные для проектирования
Номинальная грузоподъемность: Gн = 16т
Размеры пролета: длина L = 48м
ширина B = 24 м
высота Н = 10 м
Мостовой кран предназначен для выполнения вспомогательных работ.
1.4 Выбор типа крана
Для выполнения погрузо-разгрузочных работ и периодического перемещения груза в цехе наибольшее применение находят мостовые краны общего назначения режимной группы 5К. На основании исходных данных по таблице IV. 2. 5 (2) выбираются технические данные крана:
Номинальная грузоподъемность Gм = 21,7 т
Вес тележки Gт = 3,7 т
Скорость передвижения моста  = 75 м/мин
= 75 м/мин
Скорость передвижения тележки  = 38 м/мин
= 38 м/мин
Скорость подъема  = 9,6 м/мин
= 9,6 м/мин
Длина моста Lм = 22,5 м
Ширина моста Вм = 5,6 м
Ширина тележки Вт = 2 м
Высота подъема Нп = 0,8 м
Диаметр ходового колеса тележки Дхкт = 350 мм
2.1 Расчет циклограммы
Расчет циклограммы производится для определения режима работы проектируемого механизма. Режим работы определяется по величине времени цикла, для расчета которого необходимо определить время работы всех механизмов с грузом и без груза.
1. Определяем время работы механизмов.
При работе механизмов с грузом и без груза время работы принимается одинаковым.
а) механизма моста



б) механизма тележки

в) механизма подъема
2. Принимаем время зачаливания и расчаливания груза
3. Определяем время цикла


 мин < 10 мин, следовательно, режим работы механизмов повторно – кратковременный.
мин < 10 мин, следовательно, режим работы механизмов повторно – кратковременный.
4. Расчетное значение продолжительности включения для проектируемого механизма составит

 =
= 
Принимаем номинальное значение ПВн = 15%, режим работы «Л».
5. Определяем время паузы
2.2 Предварительный расчет мощности и выбор двигателя
Для механизма, работающего в повторно-кратковременном режиме, мощность двигателя определяется по расчетной эквивалентной мощности.
Для определения этой мощности необходимо рассчитать статистические мощности, возникающие на валу двигателя при работе механизма:
а) с грузом

 , (1)
, (1)
где  и
и  - номинальная грузоподъемность и вес тележки, Н
- номинальная грузоподъемность и вес тележки, Н  - коэффициент запаса, учитывающий увеличение сопротивления
- коэффициент запаса, учитывающий увеличение сопротивления
движению из-за трения реборд ходовых колес о рельсы, м
 - скорость передвижения тележки м/с
- скорость передвижения тележки м/с
 ,
,  - радиусы ходового колеса и цапфы ходового колеса, м
- радиусы ходового колеса и цапфы ходового колеса, м
Диаметр цапфы принимается равным:
 =
= 
 ,
,  - коэффициенты трения в опорах и трения качения ходовых колес;
- коэффициенты трения в опорах и трения качения ходовых колес;
 ,
, 
 - КПД механизима тележки; = 0,7
- КПД механизима тележки; = 0,7

б) без груза 

По полученным данным строится циклограмма  (Рис. 2)
(Рис. 2)

Рис.2 Циклограмма
Определяем расчетную эквивалентную мощность:

По каталогу предварительно выбираем двигатель по условию
 ,
,
где  – коэффициент запаса, учитывающий дополнительную загрузку
– коэффициент запаса, учитывающий дополнительную загрузку
двигателя в периоды пуска;  (1)
(1)
Расчётная мощность составит:

При грузоподъемности более 10 тонн целесообразно принимать асинхронные двигатели с фазным ротором краново-металлургической серии. Данная серия имеет более высокий класс изоляции, что обеспечивает более надежную работу двигателя при частых пусках.
Выбираем двигатель типа MTF 012 – 6 (2)
Технические данные двигателя:









2.3 Выбор типа редуктора
Редуктор выбирается следующим условиям:
1. По мощности редуктора на быстроходном валу
 ,
,
где  - коэффициент, зависящий от назначения и режима работы механизма.
- коэффициент, зависящий от назначения и режима работы механизма.
Для механизма тележки при режиме «Л» 
 – наибольшая статическая мощность на валу двигателя, кВт
– наибольшая статическая мощность на валу двигателя, кВт

2. По значению передаточного числа


 ,
,
где  – номинальная частота вращения двигателя, об/мин
– номинальная частота вращения двигателя, об/мин
 - частота вращения ходовых колёс, об/мин
- частота вращения ходовых колёс, об/мин
 =
= 
Выбираем горизонтальный редуктор типа:
РМ – 500 (4)
N р = 11,6 кВт
 = 48,57
= 48,57
2.4 Проверка двигателя
Выбранный двигатель необходимо проверить по условиям нагрева, допустимой перегрузки, пуска и допустимого ускорения.
2.4.1 Проверка по нагреву
Двигатель механизма тележки работает в повторно-кратковременном режиме. По его обмоткам протекают пусковые токи, вызывающие быстрое старение изоляции, поэтому проверка по нагреву является основной.
Для этой проверки необходимо рассчитать статические моменты, возникающие на валу двигателя, а также время пуска и торможения.
Определяем статические моменты, возникающие на валу двигателя при работе:
а) с грузом


б) без груза

Номинальный момент двигателя:

Средний пусковой момент:
 ,
,
где  и
и  - соответственно кратности максимального и минимального моментов;
- соответственно кратности максимального и минимального моментов;
для асинхронных двигателей с фазным ротором

 (3)
(3)

Принимаем средний тормозной момент


Определяем суммарный момент инерции:
 ,
,
где  - коэффициент, учитывающий момент инерции шестерен редуктора и
- коэффициент, учитывающий момент инерции шестерен редуктора и
тормозных дисков;  (1)
(1)
 - момент инерции двигателя,
- момент инерции двигателя, 

 - суммарная масса поступательно движущихся частей механизма; кг
- суммарная масса поступательно движущихся частей механизма; кг

 - угловая скорость двигателя
- угловая скорость двигателя



Определяем время пуска и торможения при работе:
а) с грузом

б) без груза

Определяем средний путь, проходимый механизмом за время пуска и торможения при работе:
а) с грузом


б) без груза


Определяем время движения механизма с установившейся скоростью при работе:
а) с грузом


б) без груза


По полученным данным строится нагрузочная диаграмма Мс = ƒ(t) (Рис.3)
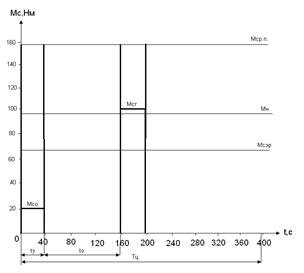
Рис.3 Нагрузочная диаграмма Мс = ƒ(t)
Определяем эквивалентный расчётный момент:


т.к.  , следовательно, двигатель по нагреву подходит.
, следовательно, двигатель по нагреву подходит.
2.4.2 Проверка по допустимой перегрузке
Кратковременные перегрузки могут возникать при снижении напряжения в питающей сети.
Для крановых двигателей допустимое снижение напряжения 
Условия проверки:
 (1)
(1)

Следовательно, двигатель удовлетворяет требованиям допустимой перегрузки.
2.4.3 Проверка по надежности пуска
Правильно выбранный двигатель должен обеспечивать надежный разгон привода, для чего требуется выполнение соотношения:
 (1)
(1)
 ,
,
где М1 и М2 – максимальный и минимальный моменты двигателя при пуске.
2.4.4 Проверка по допустимому ускорению
Двигатель удовлетворяет требования допустимого ускорения, если соблюдается соотношение:

для механизма передвижения
 (1)
(1)
Максимальное допустимое ускорение тележки определяется:
 ,
,
где  - число приводных ходовых колёс;
- число приводных ходовых колёс;  (3)
(3)
 - общее число ходовых колёс;
- общее число ходовых колёс; 
 -коэффициент сцепления ходовых колёс с рельсами;
-коэффициент сцепления ходовых колёс с рельсами; 
К -коэффициент запаса сцепления; К = 
g- ускорение свободного падения; g =  м/с2
м/с2


2.5 Расчет пусковых сопротивлений 
Расчет пусковых сопротивлений производится графоаналитическим методом.
Для этого необходимо рассчитать и построить рабочую ветвь естественной механической характеристики, которая строится по двум точкам:
1 точка  ,
, 
2 точка  ,
,  ,
,
где 
Для построения пусковой диаграммы вместо значений моментов принимаются их кратности:
Номинального момента 
Статического момента 
Переключающего момента 
Пикового момента  ,
,
где  - кратность пикового момента
- кратность пикового момента
 ,
,
где m – число ступеней сопротивления в цепи ротора;
для крановых двигателей m = 5
= 
Пиковый момент
По полученным данным строится пусковая диаграмма
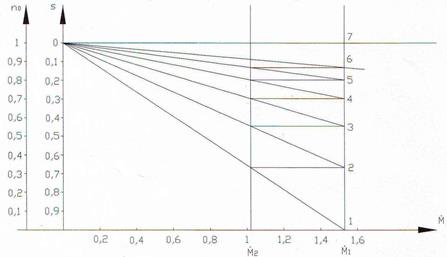
Рис.4 Пусковая диаграмма
Определяем сопротивление фазы ротора:
Определяем сопротивление каждой ступени:





Сопротивление фазы ротора для каждой ступени









Построение естественной и искусственных механических
Характеристик
Построение механических характеристик выполняется на основании формулы Клосса
При построении используются кратности максимального и текущего значения.
Кратность максимального момента

Критическое скольжение

Искусственные механические характеристики строятся с учетом введения добавочного активного сопротивления в цепь ротора. При этом кратность максимального момента остается неизменной, а величина критического скольжения изменяется и для каждой ступени сопротивления вводимого в цепь ротора определяется по формуле:

Расчет производится для текущих значений скольжения S=0÷1 с интервалом 0,05, поэтому эти расчеты целесообразно производить с помощью компьютера по программе «Excel».
Данные расчета приведены в таблице 1.
Таблица 1 Данные расчетов механических характеристик
| Mmax | 1,48 | |||||||||||||||||||||||||
| Sн | 0,215 | RHP | 0,24 | Ri1 | 3,45, | 6,27 | ||||||||||||||||||||
| n0 | Ri2 | 2,63 | 4,14 | |||||||||||||||||||||||
| Skp | 0,55 | Ri3 | 1,99 | 2,78 | 0,364 | |||||||||||||||||||||
| Ri4 | 1,53 | 1,88 | ||||||||||||||||||||||||
| Ri5 | 1,21 | 0,42 |
| |||||||||||||||||||||||
| S | 0,00 | 0,10 | 0,19 | 0,30 | 0,400 | 0,50 | 0,60 | 0,70 | 0,80 | 0,90 | 1,00 | |||||||||||||||
| M | 0,00 | 1,17 | 1,87 | 2,22 | 2,25 | 2,14 | 1,99 | 1,84 | 1,69 | 1,56 | 1,44 | |||||||||||||||
| Sи5 | 0,00 | 0,10 | 0,19 | 0,30 | 0,40 | 0,50 | 0,60 | 0,70 | 0,80 | 0,90 | 1,00 | |||||||||||||||
| Mu5 | 0,00 | 1,02 | 1,70 | 2,14 | 2,26 | 2,23 | 2,12 | 1,99 | 1,86 | 1,73 | 1,61 | |||||||||||||||
| Sи4 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,70 | 0,8 | 0,9 | |||||||||||||||||
| Mu4 | 0,00 | 0,24 | 0,45 | 0,71 | 0,92 | 1,13 | 1,31 | 1,48 | 1,63 | 1,76 | 1,88 | |||||||||||||||
| Sи3 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | |||||||||||||||||
| Mu3 | 0,00 | 0,16 | 0,31 | 0,48 | 0,64 | 0,79 | 0,93 | 1,07 | 1,20 | 1,33 | 1,44 | |||||||||||||||
| Sи2 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,000 | ||||||||||||||||
| Mu2 | 0,00 | 0,11 | 0,21 | 0,33 | 0,43 | 0,54 | 0,64 | 0,74 | 0,84 | 0,94 | 1,03 | |||||||||||||||
| Sи1 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,000 | ||||||||||||||||
| Mu1 | 0,00 | 0,07 | 0,14 | 0,22 | 0,29 | 0,36 | 0,43 | 0,50 | 0,57 | 0,64 | 0,70 |
Рис.5 График естественной и искусственных механических характеристик