Осевое напряжение от внутреннего давления:
 ;
;
 ,
,
где s0 – толщина стенки рубашки в конце срока службы;
s – исполнительная толщина стенки рубашки;
с – прибавка для компенсации коррозии;
с1 – дополнительная прибавка.
Окружное напряжение от внутреннего давления:
 ;
;
Максимальное мембранное напряжение от основных нагрузок:
 ;
;
 ;
;
где К1 = f(γ) – коэффициент, определяемый по рис. 14.6 [2, с.287],
γ – безразмерный параметр,
е – расстояние от наружной поверхности аппарата до оси элемента крепления опоры.
 К1 = 0,55
К1 = 0,55
 ;
;
Максимальное напряжение изгиба от реакции опоры:
К2 = 0,5 – коэффициент, определяемый по рис. 14.7 [2, с.287]
Условие прочности имеет вид:
 ;
;
условие выполняется.
где sт = 252МПа [4, с.25],
А = 1 – для эксплуатационных условий [2, с.287].
Построение эпюр напряжений и деформаций для корпусных элементов аппарата
Цилиндрическая часть аппарата
Анализ геометрии:
Первый и второй главные радиусы кривизны соответственно равны:
R1 = ¥;
R2 = D/2 = 1,1м;
j = p/2 = сonst,
φ – является постоянной величиной, следовательно, не может служить текущей координатой. Принимаем новую текущую координату dx = R1×dj.
Компоненты внешней поверхностной нагрузки: Х = 0; Z = - P = сonst.
Нагрузка свободного края:  ;
;
Внутренние силы
Меридиональная сила:  ;
;
Кольцевая сила:  .
.
Напряжения
Меридиональное напряжение:  ;
;
Кольцевое напряжение:  ;
;
Эквивалентное напряжение:  ;
;
Первое главное напряжение:  ;
;
Третье главное напряжение:  ;
;
Радиальная деформация
 .
.
Эллиптическое днище
 Анализ геометрии: j [0;p/2].
Анализ геометрии: j [0;p/2].
А = f(φ), В = f(φ),
 ;
;
 ;
;
при j = p/2:
 ;
;
 ;
;
при j = 0:
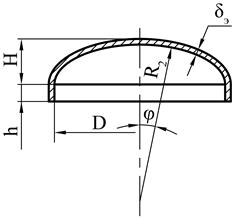
| Рисунок 16 – Эллиптическое днище |
 ;
;
Проекции внешних сил
Х = 0; Z = - PR; Q = 0.
Внутренние силы
|
|
при j = p/2, т.е. в точках экватора:
 ;
;
 .
.
при j = 0, т.е. в точках полюса:
 ;
;
 .
.
Напряжения:
при j = p/2:
при j = 0:
Радиальные деформации
при j = p/2:
 .
.
при j = 0
 .
.
Найдем координату φ, где напряжения от кольцевых сил равно нулю:
 при Т = 0;
при Т = 0;
 ;
;
 ;
;
 ;
;
4sin2φ + cos2φ = 2;
3sin2φ + 1 = 2;
3sin2φ = 1;
sin2φ = 1/3;
 .
.
Коническая часть аппарата
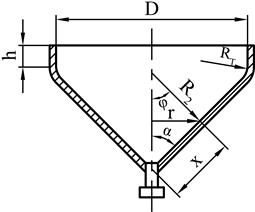 Анализ геометрии: R1 = ¥; R2 = x×tga; j = p/2 - a = сonst; R2 = D/2; φ – является постоянной величиной, следовательно, не может служить текущей координатой. Принимаем новую текущую координату dx = R1×dj.
Анализ геометрии: R1 = ¥; R2 = x×tga; j = p/2 - a = сonst; R2 = D/2; φ – является постоянной величиной, следовательно, не может служить текущей координатой. Принимаем новую текущую координату dx = R1×dj.
Проекции внешних сил
Х = 0; Z = - PR; Q = 0.
Внутренние силы
при x = xmax:
при x = 0:
| Рисунок 17 – Расчётная схема конического днища |

Напряжения
при x = xmax:
при x = 0:

Деформации
при x = xmax:
 .
.
при x = 0:
 .
.
Торовая часть аппарата
Анализ геометрии: j = p/4; j1 = p/2;
R1 = Rб = 0,2м = const; j [(p/2)-a; p/2].
при ji = j:
 ;
;
при ji = j1:
 ;
;
Проекции внешних сил
Х = 0; Z = - PR; Q = 0.
Внутренние силы
при ji = j:

при ji = j1:

Напряжения
при ji = j:
при ji = j1:
Деформации
при ji = j:
 .
.
при ji = j1:
 .
.
Рисунок 18 – Эпюра меридиональных Рисунок 19 – Эпюра кольцевых
напряжений, МПа напряжений, МПа
Рисунок 20 – Эпюра радиальных Рисунок 21 – Эпюра эквивалентных
Деформаций, мм напряжений, МПа
Заключение
В результате проделанной работы рассчитан и спроектирован стальной сварной аппарат с перемешивающим устройством объемом Vн = 10м3.
Поддержание оптимальной температуры проведения процесса в аппарате осуществляется с помощью теплоносителя циркулирующего внутри рубашки. Рубашка крепится к корпусу с помощью сварки. Аппарат устанавливается и крепится с помощью трех сварных опорных лап. Перемешивающее устройство (мешалка лопастная) приводится в действие от мотор-редуктора типа МПО1–10–64/3–Ф1В–ТУ2–056–223–84.
|
|
В процессе выполнения курсового проекта был:
1. произведен подбор основных элементов аппарата (обечайка цилиндрическая, днище эллиптическое, днище коническое) и рубашки;
2. рассчитаны толщины стенок основных элементов аппарата и рубашки;
3. подобраны и рассчитаны штуцера для всех технологических отверстий, предусмотренных в аппарате;
4. сконструированы и подобраны фланцевые соединения;
5. проверено на прочность и жесткость фланцевое соединение между эллиптическим днищем и цилиндрической обечайкой;
6. произведено конструирование и расчет укрепления отверстий аппарата;
7. подобраны опоры и проведена проверка прочности стенки аппарата под опорой;
8. выбран привод и уплотнение вала мешалки;
9. произведен расчет вала на виброустойчивость, жесткость и прочность;
10. построены эпюры напряжений для корпусных элементов аппарата.
Список использованной литературы