в условиях монтажа:
 ;
;  ;
;
 ,
,
условие выполняется;
в рабочих условиях:
 ;
;  ;
;
 ,
,
условие выполняется.
Приведенные изгибающие моменты в диаметральном сечении фланца:
 ;
;

Расчёт фланца приваренного встык
Максимальное напряжение в сечения S1 фланца наблюдается в месте соединения втулки с плоскостью фланца:
 ,
,
где М0 – расчетное значение приведенного изгибающего момента соответствующее большему из приведённых изгибающих моментов;
Т – безразмерный параметр, определяемый по диаграмме и зависящий от К
[2, с.263].
Максимальное напряжение в сечения S0 фланца наблюдается в месте соединения втулки с обечайкой или днищем:
 ,
,
где y3 = 1,85 рис. 13.18 [2, с.264].
Напряжение в кольце фланца от действия М0:
 ;
;
Напряжения во втулке фланца от внутреннего давления:
 ;
;
 .
.
Условия прочности фланца:
в сечении S1:
 ;
;
 ;
;
 ,
,
условие выполняется;
в сечении S0:
 ,
,
где  ;
;
 ;
;
 ,
,
условие выполняется.
Угол поворота фланца
 ;
;
 ,
,
где  ;
;
 ,
,
условие выполняется.
Выбор привода и уплотнение вала мешалки
5.1. Выбор схемы и определение режима работы
перемешивающего устройства
Перемешивание позволяет интенсифицировать различные процессы, происходящие в аппарате (гомогенизация, теплообмен, химическая реакция). Общие технические условия, типы и основные параметры вертикальных аппаратов с механическими перемешивающими устройствами даны в ГОСТ 25167-82, ГОСТ 20680-86Е.
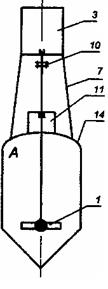
Рисунок 12 – Схема привода
1 – мешалка, 3 – мотор-редуктор, 7 – стойка, 8 – продольно-разъёмная муфта,
11 – торцовое уплотнение, 14 – корпус аппарата.
Определяем значение критерия Рейнольдса:
 .
.
Коэффициент сопротивления x = 0,88.
Расстояние от мешалки до дна аппарата:
 ;
;
 ;
;
 .
.
Геометрический параметр:
|
|
 .
.
5.2. Определение мощности, затрачиваемой на перемешивание и
глубины воронки
Коэффициент гидравлического сопротивления:
 ,
,
где zм = 1 – количество мешалок;
Глубина воронки, образующейся при вращении мешалки, определяется по следующей формуле:
 ,
,
где В = 3,5 – коэффициент [4, c.72].
Так как глубина воронки такова, что "обнажение" мешалки не происходит.
Мощность, затрачиваемая на перемешивание:
 ,
,
где  – критерий мощности;
– критерий мощности;
Коэффициент К1 = 0,14 значение которого находится по графику в зависимости от параметра Е.
Выбор мотор - редуктора
При определении мощности привода необходимо учитывать перегрузки, возникающие при пуске перемешивающего устройства в аппарате, заполненном жидкостью, потери мощности в уплотнении Nу и потери на трение в подшипниках и передачах. Необходимая мощность электродвигателя может определяться по следующему соотношению и в первом приближении (при Nт = 0) составит:
 ,
,
где ηмех = 0,9 – коэффициент полезного действия привода в первом приближении [4, с.75].
По полученному значению мощности и частоте вращения вала выбираем тип мотор – редуктора, его основные размеры и характеристики [4, с.77 – 79]:
Мотор-редуктор МПО (ТУ2-056-223-84):
Число ступеней 2;
Габарит 10;
Частота вращения выходного вала 64 мин-1;
Мощность электродвигателя 3 кВт;
Исполнение выходного вала Ф1В.
МПО1–10–64/3–Ф1В–ТУ2–056–223–84.
Потери мощности (кВт) в торцевом уплотнении определяются по эмпирической формуле:
 ,
,
где d – диаметр вала, м; К – коэффициент, К = 7,2.