Анализ системы автоматического управления.
A. Исследование заданной системы на устойчивость двумя критериями.
Исходную схему представим в следующем виде:
Рисунок 2 – Приведенная схема САУ


Найдем передаточную функцию 




Сразу же определим передаточную функцию для случая разомкнутой системы:

Для анализа устойчивости САУ воспользуемся двумя методами: критерием Михайлова и критерием Найквиста.
Проверка устойчивости линейной САУ с помощью критерия Михайлова.
Для устойчивости линейной системы n -го порядка необходимо и достаточно, чтобы годограф Михайлова при изменении ω от 0 до ∞ начинался на положительной вещественной полуоси и проходил последовательно против часовой стрелки n квадрантов, не обращаясь в 0 и стремясь к ∞ в n -м квадранте. Расчет произведем в пакете Mathcad.


Рисунок 3 – Годограф Михайлова при w=0..1000
Таким образом, система согласно критерию Михайлова не устойчива.
Проверка устойчивости линейной САУ с помощью критерия Найквиста.
Если разомкнутая система устойчива (в нашем случае она устойчива согласно общему условию устойчивости: корни характеристического уравнения имеют отрицательную вещественную часть), то для устойчивости замкнутой системы необходимо и достаточно, чтобы на всех частотах, где ЛАЧХ разомкнутой системы положительна, фазовый сдвиг не достигал значения  или достигал его четное число раз.
или достигал его четное число раз.
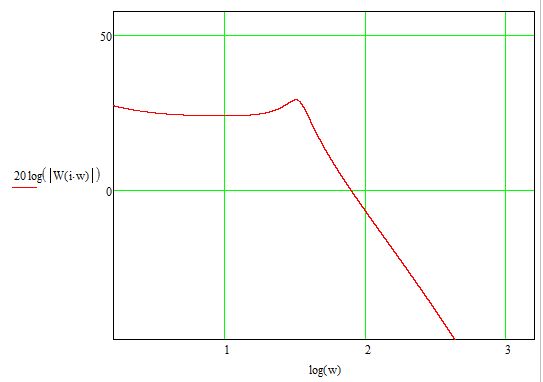
Рисунок 4 – ЛАЧХ разомкнутой системы

Рисунок 5 - ЛФЧХ разомкнутой системы
Исходя из рисунка 5, можно сделать вывод, что сдвиг по фазе достигает значения в -180 градусов при log(w)=1,56 дек. Вернемся к рисунку 4. При log(w)=1,56 значение функции положительно. Таким образом, система по критерию Найквеста неустойчива.
|
|
Так как система не устойчива, что подтвердилось анализами по двум критериям, то делать проверку на статическую ошибку не нужно.
Синтез системы автоматического управления
А. Определение требуемого коэффициента передачи синтезируемой САУ
Статическая ошибка не должна превышать максимально допустимую статическую ошибку:

где  – минимальный коэффициент усиления
– минимальный коэффициент усиления
Найдем коэффициенты усиления  и
и  частей разомкнутой системы, находящихся после и до возмущаюшего воздействия соответственно.
частей разомкнутой системы, находящихся после и до возмущаюшего воздействия соответственно.





Выбираем большее значение. Таким образом, 
Коэффициент усиления корректирующего устройства с учетом 10% запаса:

Принимаем: 
б. Синтез корректирующих устройств методом логарифмических частотных характеристик.
Под синтезом понимается проектирование регулятора для системы автоматического управления по заданным требованиям к динамическим и статическим свойствам последней.
Для расчета регулятора необходимо построить логарифмическую амплитудную частотную характеристику объекта и на основе требований к качеству процессов в замкнутой системе сформировать ЛАЧХ разомкнутой системы. Для заданной схемы применяем последовательное корректирующее устройство.
Рисунок 6 - Структурная схема системы автоматического управления с корректирующим устройством.
Передаточная функция разомкнутой системы с учетом корректирующего устройства будет иметь вид:

Определим характерные точки, необходимые для построения логарифмических частотных характеристик.
|
|





Построим полученный график, задав его кусочно (x =log(w), f(x)=  ).
).

|

Рисунок 7. ЛАЧХ разомкнутой системы с учетом требуемого коэффициента усиления (
Определим требуемую частоту среза для построения желаемой ЛАЧХ:


Пусть длина среднечастотного промежутка составит 2 дек, тогда отложим его влево и вправо на 1 дек относительно значения 0,94 дек. Тогда среднечастотный участок будет иметь границы от -0,06 дек до +1,94 дек. Таким образом слева и справа от данного промежутка будет находиться всего по 1 отрезку, соответствующему НЧ и ВЧ промежуткам ЛАЧХ разомкнутой САУ из рис.7. Построим график желаемой ЛАЧХ с учетом того, что низко и высокочастотные промежутки можно оставить аналогичными тем, что есть у ЛАЧХ разомкнутой системы (x=log(w), g(x)=  ).
).

|
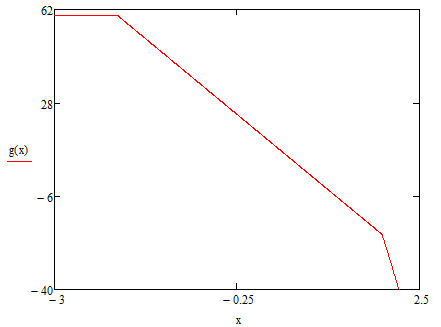
Рисунок 8. Желаемая ЛАЧХ
Далее определяем ЛАЧХ корректирующего (с(x)=  ) звена путем вычитания ЛАЧХ разомкнутого звена из желаемой ЛАЧХ.
) звена путем вычитания ЛАЧХ разомкнутого звена из желаемой ЛАЧХ.

|
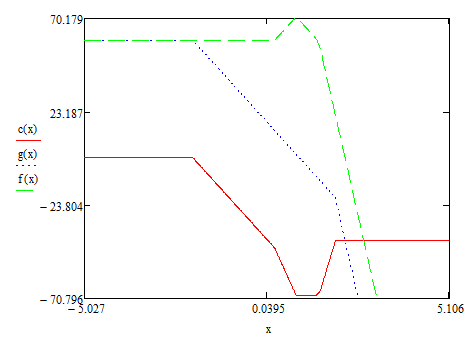
Рисунок 8. Получение ЛАЧХ корректирующего звена
Пользуясь средствами Mathcad, определяем координаты точек излома полученного графика.






Полученная передаточная функция корректирующего устройства:

Определяем передаточную функцию разомкнутой системы с учетом регулятора:
