Содержание
Техническое задание……………………………………………………………2 Введение…………………………………………………………………………5
1 Нормативные ссылки………………………………………………………...6
2 Структурный анализ рычажного механизма……………………………..7-8
3 Кинематическое исследование рычажного механизма…………………....9
3.1 Построение совмещенных планов положений механизма…….……..9
3.2 Построение планов скоростей………………………………………10-12
3.3 Построение плана ускорений………………………………………13-16
3.4 Диаграммы движения рабочего органа (звена 5)…………………….18
4 Силовой расчет рычажного механизма………………………………...…21
4.1 Общие положения………………………………………………………21
4.2 Индикаторная диаграмма (ИД)……………………………………..22-23
4.3 Силовой расчет…………………………………………………………24
4.3.1 Определение реакций в кинематических парах звеньев 4 и 5...24-26
4.3.2 Определение реакции в кинематических парах звеньев 2 и 3...27-29
4.3.3 Силовой расчет группы начальных звеньев………………………..30
Заключение………………………………………………………………….32
Список использованных источников……………………………………...33
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Введение
Курсовая работа по теории механизмов и машин (ТММ) является самостоятельной работой студента, завершающей изучение этой дисциплины. В процессе разработки работы студент приобретает навыки применения усвоенных им основных положений и выводов теории механизмов и машин для решения следующих задач проектирования механизмов машинного агрегата:
1) структурный и кинематический анализ рычажного механизма;
2) силовой расчет рычажного механизма.
В соответствии с этими задачами графическая часть курсовой работы состоит из двух листов чертежей формата А1, наименования которых совпадают с формулировками приведенных двух пунктов, а текстовая часть работы состоит из пояснительной записки. Конкретное содержание курсовой работы определяется тематикой задания на проектирование механизмов машинного агрегата, которое выдается на руки студенту. Задание на курсовую работу по ТММ содержит названия разрабатываемых механизмов машинного агрегата, их кинематические схемы, технические характеристики и предъявляемые к ним технические требования, а также дополнительные указания, необходимые для проектирования.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие нормативные документы:
ГОСТ Р 1.5-2004. Стандарты национальные Российской Федерации. Правила построения, изложения, оформления и обозначения
ГОСТ Р 1.12-99 ГСС. Стандартизация и смежные виды деятельности. Термины и определения
ГОСТ 2.316-68 ЕСКД. Правила нанесения на чертежах надписей, технических требований и таблиц
ГОСТ 8.417-2000 ГСИ. Единицы величин
ГОСТ 2.301-68 ЕСКД. Форматы
ОК 015-94 Общероссийский классификатор единиц измерения
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Структурный анализ рычажного механизма
Структурной (принципиальной) схемой называется схема с условным обозначением звеньев и кинематических пар без указания размеров звеньев.
Структурный анализ – определение строения механизма, т.е. решение, из каких простейших групп он состоит и в каком порядке эти группы звеньев присоединяются друг к другу.
По Л.В. Ассуру механизм состоит:
- из первичного механизма, состоящего из подвижного звена и стойки с W=1, часто его называют группой начальных звеньев (ГНЗ);
- группы нулевой подвижности с W=0 (группы Ассура).
Структурный анализ предваряет кинематическое и силовое исследование любого механизма и определяет их порядок и способ.
Порядок структурного анализа:
1. Определяем число степеней свободы механизма (плоского) по формуле П.Л. Чебышева
W=3n – 2p5 – p4,
где n – число подвижных звеньев;
p5 – число кинематических пар 5-го класса;
p4 – число кинематических пар 4-го класса;
2. Назначаем группу начальных звеньев с W, равной W механизма;
3. Отсоединяем группы Ассура (W=0), начиная с наиболее отдаленной от группы начальных звеньев (рисунок 1).
Примечания: а) кинематический анализ проводят в порядке, обратном
структурному анализу;
б) силовое исследование проводят в порядке проведения
структурного анализа;
в) для всех схем в курсовой работе (рисунок 1)
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
и строение механизма имеет вид:
звенья 4 и 5 – группа Ассура, W=0;
звенья 2 и 3 – группа Ассура, W=0;
звенья 1 и 6 – группа начальных звеньев, W=1.

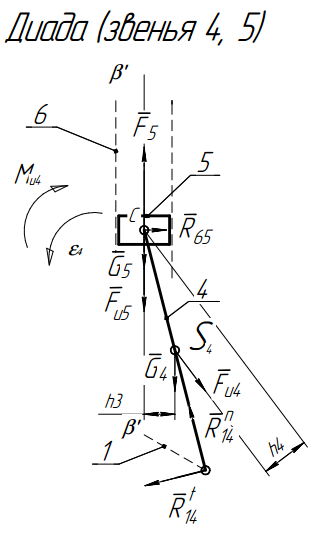
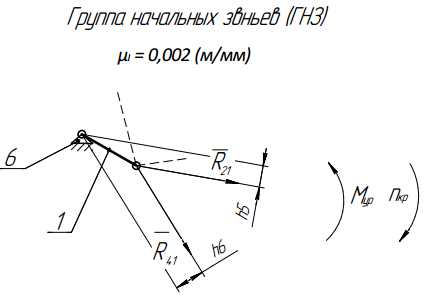
Рисунок 3 – Структурный анализ механизма
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
3.1 Построение совмещенных планов положений механизма
Под планом механизма понимается его графическое изображение в выбранном масштабе  , соответствующее определенному положению начального звена. Под масштабом
, соответствующее определенному положению начального звена. Под масштабом  будем понимать отношение истинной длины звена (м) к отрезку в мм, изображающему это звено. Для определения численного значения отрезков звеньев необходимо его истинный размер разделить на выбранный масштаб длины.
будем понимать отношение истинной длины звена (м) к отрезку в мм, изображающему это звено. Для определения численного значения отрезков звеньев необходимо его истинный размер разделить на выбранный масштаб длины.
За начальное (нулевое) положение механизма удобнее всего принять одно из двух крайних положений, от которого начинается рабочий ход (расширение – для ДВС) (сжатие, нагнетание – для компрессоров).

Рисунок 4 – план положений механизма
3.2 Построение планов скоростей
Определение скоростей точек механизма проводится методом планов скоростей. План скорости представляет собой графическое решение векторных уравнений. Построение начинается из общей точки  , называемой полюсом плана скоростей. Скорость в полюсе равна нулю.
, называемой полюсом плана скоростей. Скорость в полюсе равна нулю.
1. Определяем скорость точки А начального звена, м/с;

где  – частота вращения кривошипа;
– частота вращения кривошипа;
 – длина кривошипа.
– длина кривошипа.

Из полюса  плана скоростей («i» - номер положения механизма) откладываем отрезок
плана скоростей («i» - номер положения механизма) откладываем отрезок  перпендикулярно ОА в направлении вращения звена 1, который представляет в масштабе скорость точки А.
перпендикулярно ОА в направлении вращения звена 1, который представляет в масштабе скорость точки А.
2.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
 ,
,
3. Определяем скорость точки В группы Ассура (звенья 2,3).
Составляем векторное уравнение
 ,
,
где  ;
;  – относительная скорость точки В во вращательном движении относительно точки А;
– относительная скорость точки В во вращательном движении относительно точки А;  β – β.
β – β.
В уравнении вектор, подчеркнутый двумя линиями, известен по величине и по направлению, а подчеркнутый одной – известен только по направлению.
Известно, что векторное уравнение с двумя переменными решается графически. Решаем приведенное векторное уравнение. Из точки a конца вектора  проводим линию вектора
проводим линию вектора  перпендикулярно АВ. Затем через полюс проводим линию действия вектора
перпендикулярно АВ. Затем через полюс проводим линию действия вектора  параллельно направляющей β-β. Пересечение этих прямых дает точку «b ». Отрезок
параллельно направляющей β-β. Пересечение этих прямых дает точку «b ». Отрезок  , мм, представляет собой в масштабе скорость точки В, а отрезок
, мм, представляет собой в масштабе скорость точки В, а отрезок  , мм, относительную скорость точки В относительно точки А.
, мм, относительную скорость точки В относительно точки А.
Скорости равны, м/с:
 ;
;
 .
.
4. Определим скорость точки С группы Ассура (звенья 4 и 5).
Составляем векторное уравнение
 ,
,
где ;  ;
;  .
.
Решаем это уравнение графически. К вектору  (точка «a ») векторно прибавляем вектор
(точка «a ») векторно прибавляем вектор  , т.е. через точку «a » проводим прямую,
, т.е. через точку «a » проводим прямую,
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
и равна вектору  , то через полюс проводим линию вектора . В пересечении этих прямых получаем точку «c ». Отрезок (
, то через полюс проводим линию вектора . В пересечении этих прямых получаем точку «c ». Отрезок ( ) изображают в масштабе, скорость точки С, а отрезок
) изображают в масштабе, скорость точки С, а отрезок  – относительную скорость точки С относительно точки А.
– относительную скорость точки С относительно точки А.
Скорости равны, м/с:
 ;
;
 .
.
5.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
 и
и  центров масс звеньев 2 и 4 (точки
центров масс звеньев 2 и 4 (точки  и
и  ) по теореме подобия.
) по теореме подобия.
Теорема подобия гласит: фигура, образованная линиями, соединяющими точки одного и того же звена, и фигура, образованная линиями, соединяющими соответствующие точки на плане скоростей, подобны друг другу. В нашем примере фигуры звеньев 2(АВ) и 4(АС) представляют собой прямые линии. Центры их масс и лежат на этих прямых. Поэтому и точки и на плане скоростей будут находиться на этих прямых, а их положение определяется из уравнений подобия, мм:
 ;
;  ,
,
Откуда  ;
;  .
.
Соединяя точки и с полюсом , получаем отрезки ( ) и
) и  ), представляющие в масштабе скорости точек и , м/с
), представляющие в масштабе скорости точек и , м/с
 ;
;
 .
.

Рисунок 5 – план скоростей механизма
6.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Угловые скорости равны,  :
:
 ;
;
 .
.
Направления  и
и  легко определить, если перенести скорость
легко определить, если перенести скорость  в точку В плана механизма, а скорость
в точку В плана механизма, а скорость  в точку С плана механизма и посмотреть, в каком направлении они вращают звенья 2 и 4 соответственно относительно точки А.
в точку С плана механизма и посмотреть, в каком направлении они вращают звенья 2 и 4 соответственно относительно точки А.
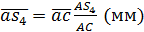
3.3 Построение планов ускорений
Определение ускорений точек механизма проводится методом планов ускорений, которые представляют собой графическое решение векторных уравнений. Построение начинается из общей точки  , названной полюсом плана ускорений. Ускорение в этой точке равно 0.
, названной полюсом плана ускорений. Ускорение в этой точке равно 0.
Порядок определения ускорений точек звеньев полностью совпадает с таковым при определении скоростей.
Рассмотрим построение плана ускорений в общем виде на примере механизма поршневого компрессора
1. Определяем ускорение точки А начального звена.
Ускорение точки А, которая совершает вращательное движение с центром в точке О, в общем случае равно  , где
, где  – нормальное ускорение, направленное к точке О,
– нормальное ускорение, направленное к точке О,  – тангенциальное ускорение, направленное перпендикулярно кривошипу ОА в сторону углового ускорения
– тангенциальное ускорение, направленное перпендикулярно кривошипу ОА в сторону углового ускорения  .
.
По заданию на курсовую работу  , т.е.
, т.е.  . Следовательно, имеем,
. Следовательно, имеем,  :
:
 .
.

2.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
и откладываем от нее отрезок ( ) параллельно АО в направлении от точки А к точке О.
) параллельно АО в направлении от точки А к точке О.
Этот отрезок может быть взят произвольной длины, но:
a) для получения приемлемого и удобочитаемого плана ускорений лучше принять  ;
;
б) выбрать длину такой, чтобы значения масштаба плана ускорений были удобным числом для последующих расчетов.
3. Определяем масштаб плана ускорений,  ,
,

4. Определяем ускорения точки В, составляя векторное уравнение
 .
.
Здесь  – абсолютное ускорение точки В;
– абсолютное ускорение точки В;
 – нормальное ускорение точки во вращательном движении В относительно точки А.
– нормальное ускорение точки во вращательном движении В относительно точки А.
Вектор  и направлен от точки В к точке А;
и направлен от точки В к точке А;
 – тангенциальное ускорение точки В во вращательном относительном движении относительно точки А, вектор
– тангенциальное ускорение точки В во вращательном относительном движении относительно точки А, вектор  .
.
Значение  определяется по формуле
определяется по формуле
 .
.

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
 .
.
Для этого из конца вектора  (точка «а ») проводим отрезок
(точка «а ») проводим отрезок  , который в принятом масштабе изображает ускорение .
, который в принятом масштабе изображает ускорение .
Длина этого отрезка равна, мм,  .
.
 .
.
Через полученную точку «n » проводим линию  перпендикулярно АВ. Затем через полюс проводим прямую параллельную направляющей β-β, т.е. по направлению ускорения точки В (
перпендикулярно АВ. Затем через полюс проводим прямую параллельную направляющей β-β, т.е. по направлению ускорения точки В ( ).
).
В пересечении этих прямых получим точку «b » – конец вектора ускорения точки В. Отрезок ( ) изображает ускорение точки В (), а отрезок (
) изображает ускорение точки В (), а отрезок ( ) – ускорение
) – ускорение  . Ускорения равны,
. Ускорения равны,  :
:


5. Определим ускорение точки С, составляя векторное уравнение
 ;
;
где  ,
,  ,
,  .
.
Значение ускорения  , :
, :

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
 , представляющий в масштабе ускорения
, представляющий в масштабе ускорения  . Длина отрезка равна:
. Длина отрезка равна:
 .
.
Через полученную точку ( ) проводим линию действия ускорения
) проводим линию действия ускорения  , а через полюс плана ускорений – линию, параллельную направляющей
, а через полюс плана ускорений – линию, параллельную направляющей  . В пересечении этих прямых получаем точку «c ». Значения неизвестных до этого ускорений равны, :
. В пересечении этих прямых получаем точку «c ». Значения неизвестных до этого ускорений равны, :


6. Ускорения точек центров масс  и
и  определяются по теореме подобия аналогично определению скоростей этих точек.
определяются по теореме подобия аналогично определению скоростей этих точек.
Соединяем линиями на плане ускорений точки «а » и «b », «a » и «c » и замеряем величины отрезков  .
.
Положение точек на плане ускорений находим из пропорций:
 ;
;  ,
,
откуда  ;
;  .
.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
отрезок  и
и  , находим ускорения точек и ,
, находим ускорения точек и ,


7. Определяем угловые ускорения звеньев 2 и 4. Величины угловых ускорений равны:


Для определения направлений  и
и  необходимо перенести с плана ускорений относительное ускорение в точку В, а относительное ускорение
необходимо перенести с плана ускорений относительное ускорение в точку В, а относительное ускорение  в точку С плана механизма. Сопоставляя направления ω и ε для звеньев 2 и 4, определяем, какой вид движения, ускоренное или
в точку С плана механизма. Сопоставляя направления ω и ε для звеньев 2 и 4, определяем, какой вид движения, ускоренное или
замедленное, совершают эти звенья. 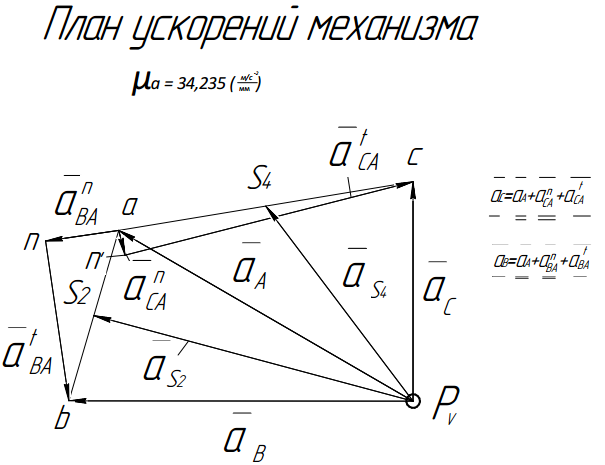
Рисунок 6 – план ускорений механизма
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
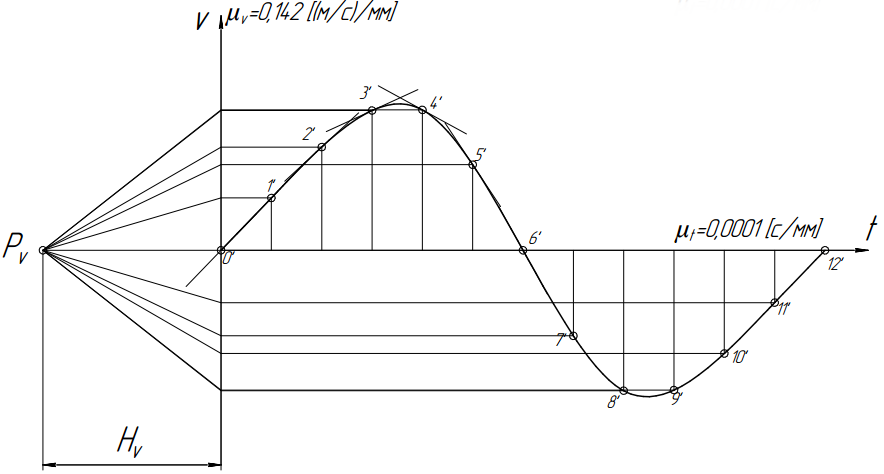
Кинематические диаграммы представляют собой графики зависимости пути S(t), скорости V(t) и ускорения a(t) от времени для точек звеньев.
В курсовой работе за такую точку принимается точка В или С рабочего органа (звено 3 или 5). Диаграммы строятся в прямоугольной системе координат. По оси абсцисс откладывают отрезок, представляющий собой в масштабе  период ведущего звена (время одного оборота), а по оси ординат – отрезки, которые в масштабе представляют собой путь, скорость и ускорение заданной точки в данный момент времени.
период ведущего звена (время одного оборота), а по оси ординат – отрезки, которые в масштабе представляют собой путь, скорость и ускорение заданной точки в данный момент времени.
Строится диаграмма S(t), используя планы положений механизма;
Решение:
1) построение диаграммы пути  (t)
(t)
а) по оси абсцисс откладываем отрезок, выражающий время одного оборота кривошипа. Длину отрезка принимать порядка 180….240 мм, для получения выразительных графиков.
б) делим этот отрезок на равные части, число которых (6, 8,12) равно числу положений механизма;
в) определяем масштаб по оси t.
 с/мм
с/мм
г) по оси ординат откладываем отрезки  ,
,  и т.д., равные расстояниям точки B от своего крайнего положения (
и т.д., равные расстояниям точки B от своего крайнего положения ( ) в масштабе
) в масштабе  .
.
Если ход точки В на планах положений  , то можно применить
, то можно применить  .
.
В противном случае увеличиваем отрезки в «К» раз так, чтобы получить  . При этом масштаб диаграммы скоростей будет равен,
. При этом масштаб диаграммы скоростей будет равен,  ,
,
 =0,001м/мм
=0,001м/мм
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Таблица 1–Значения скоростей точек механизма
 , м/с , м/с
|  , м/с , м/с
|  , м/с , м/с
|  , м/с , м/с
|  , м/с , м/с
|  , м/с , м/с
|  , м/с , м/с
|
| 13,1 | 8,14 | 9,6 | 11,43 | 6,7 | 9,22 | 10,9 |
Таблица 2–Значения ускорений точек механизма
 , , 
|  , ,
|  , ,
|  , ,
|  , ,
|  , ,
|  , ,
|
| 3423,5 | 2208,2 | 746,5 | 2990,77 | 3320,8 | 2458,8 |
Таблица 3–Значения угловых скоростей и ускорений звеньев механизма
 , , 
|  , ,
|  , , 
|  , ,
|  , ,
|
| 65,31 | 38,3 |
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Общие положения
Цели силового расчета:
1) определение реакций в кинематических парах;
2) определение уравновешивающей силы (момента), приложенной к начальному звену механизма
Знание величин реакций позволяет:
а) проводить расчеты звеньев и элементов кинематических пар на прочность, жесткость, износоустойчивость и виброустойчивость;
б) определять тип и размеры подшипников качения;
в) рассчитать КПД механизма и т.д.
Знание уравновешивающих сил позволяет определить требуемую для работы механизма мощность.
Силовой расчет производится с учетом ускоренного движения методом кинетостатики. Метод основан на применении принципа Даламбера, при котором после добавления к внешним силам сил инерции механизм условно считается неподвижным и для определения неизвестных сил применяют уравнения статики.
Примечание: силами трения при расчете ввиду их незначительности пренебрегаем.
Порядок силового расчета:
1) разбиваем механизм на структурные группы (группы Ассура) с W=0 и первичный механизм (группа начальных звеньев) с W=1;
2) проводим силовой расчет групп Ассура, начиная с группы наиболее удаленной от первичного механизма;
3) расчет заканчиваем первичным механизмом.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Индикаторная диаграмма показывает изменение давления на поршень и для любого исследуемого положения по заданному диаметру поршня позволяет определить силы, действующие на него.
Откладываем по оси S ИД отрезок H, представляющий в масштабе ход поршня S, а по оси P – отрезок Pmax, который представляет в масштабе максимальное давление на поршень. Эти отрезки делим на равные участки в соответствии с заданием и расчерчиваем тонкими линиями сетку.
На сетку наносим базовые точки a, b, c, d ИД и одну-две промежуточные точки на линии bc. По этим точкам проводим линии фаз ИД.
Масштабы индикаторной диаграммы равны,  ,
,  :
:
 ;
;  ,
,
где S – реальный ход поршня (находится по результатам кинематического исследования на 1-м листе курсовой работы).
Определяем фазы индикаторной диаграммы для каждого цилиндра (звенья 3 и 5) и отмечаем точки на оси S, соответствующие исследуемому положению механизма. Расстояния  и
и  этих точек, мм, при разных, в общем случае, масштабе планов положений и масштабе на ИД находятся легко, используя планы положения 1-го листа.
этих точек, мм, при разных, в общем случае, масштабе планов положений и масштабе на ИД находятся легко, используя планы положения 1-го листа.
 ;
;
 .
.
Здесь  и
и  – расстояния поршней 3 и 5 от НМТ. Давления, соответствующие данным положениям поршней, теперь будут, если замерить ординаты
– расстояния поршней 3 и 5 от НМТ. Давления, соответствующие данным положениям поршней, теперь будут, если замерить ординаты  и
и  ИД, которые соответствуют фазам сжатия (поршень 3) и нагнетания (поршень 5) соответственно,
ИД, которые соответствуют фазам сжатия (поршень 3) и нагнетания (поршень 5) соответственно,  :
:
 ;
;

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
 ;
;
 ,
,
где  ;
;  , – площади поршней.
, – площади поршней.

 ;
;  .
.
Найденные силы  и
и  прикладываются к поршням в направлениях, соответствующих фазам их движения. Так, например, для поршневого компрессора для фаз сжатия и нагнетания сила направленная навстречу скорости поршня (сила сопротивления); для ДВС при фазе расширения сила направлена по скорости поршня (движущая сила).
прикладываются к поршням в направлениях, соответствующих фазам их движения. Так, например, для поршневого компрессора для фаз сжатия и нагнетания сила направленная навстречу скорости поршня (сила сопротивления); для ДВС при фазе расширения сила направлена по скорости поршня (движущая сила).
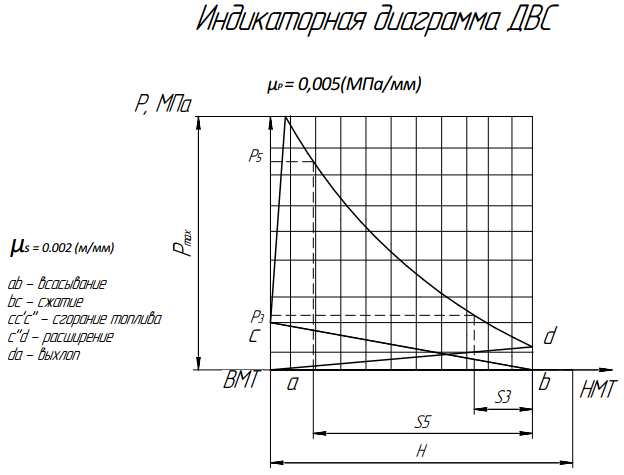
Рисунок 8 – индикаторная диаграмма ДВС
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Силовой расчет