
Рисунок 3 - Инструментальная модель трубопровода

Рисунок 4 - Блок лямбда (возмущение)

Рисунок 5 - Трубопровод
Модель системы автоматического регулирования расхода
Структурная схема САР (рисунок 6)

Рисунок 6 - Структурная схема САР
параметр(t) - текущее значение параметра объекта;
параметр - заданное значение параметра объекта;
∆- сигнал рассогласования;- сигнал регулятора;
μн - номинальное значение коэффициента открытия РО ИУ;
∆μ - относительное изменение значения коэффициента открытия РО ИУ;
λ - относительное возмущение;
ОР - объект регулирования;
СУ - согласующее устройство;
НО - нуль орган;
З - задатчик;
ПИД - ПИД регулятор;
ИУ - Исполнительной устройство.
Модель САР расхода представлена на рисунках 9-10.

Рисунок 7 - Модель САР расхода
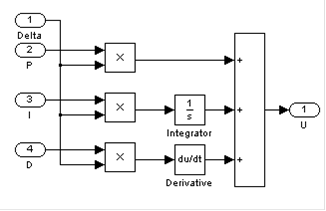
Рисунок 8 - Блок PID (ПИД - ПИД регулятор)

Рисунок 9 - Блок IU (ИУ - исполнительное устройство)
Функциональная схема электропривода (блок Privod)

Рисунок 10 - Функциональная схема блока электропривода (блок Privod)
СУ - согласующее устройство, на вход которого поступает управляющий сигнал в виде напряжения -10...+10 В.
ЭД - электродвигатель переменного тока на вход которого поступает ток напряжением 0..380 В, а на выходе формируется частота вращения вала двигателя в диапазоне -25..+25 об/сек;
Р - редуктор (устанавливается передаточное число);
ПШ- привод штока крана, на входе - угол поворота выходного вала редуктора, на выходе - перемещение штока крана.
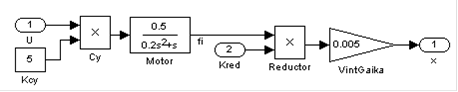
Рисунок 11 - Блок Privod (электропривод)
Результаты моделирования
пар расход автоматический регулирование
Строим графики зависимостей для различных настроек PID - регулятора.
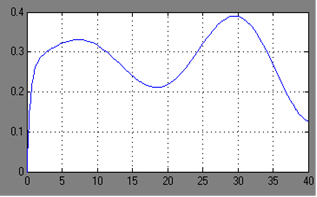
Рисунок 12 - Настройки PID - регулятора при P=20, I=10, D=0

Рисунок 13 - Настройки PID - регулятора при P=20, I=10, D=5

Рисунок 14 - Настройки PID - регулятора при P=20, I=4, D=0

Рисунок 15 - Настройки PID - регулятора при P=50, I=4, D=0,5

Рисунок 16 - Настройки PID - регулятора при P=50, I=5, D=0

Рисунок 17 - Настройки PID - регулятора при P=8,25, I=0,0135, D=0,15
Таблица 1 - Настройки регулятора
| № | Р | I | D | Время регулирования, с | Перерегулирование,% | Статическая ошибка, °С | Примечание |
| 0,2 | Система не устойчива | ||||||
| 0,17 | Система не устойчива | ||||||
| 0,02 | На грани устойчивости | ||||||
| 0,5 | 0,01 | Система устойчива | |||||
| 0,01 | Система устойчива | ||||||
| 8,25 | 0,0135 | 0,15 | Система устойчива |
По графику переходного процесса (рисунок 17) определяем, что время регулирования примерно равно 25 с, перерегулирования нет, статической ошибки нет. Из этого следует, что настройки регулятора наиболее оптимальные при: P=8,25, I=0,0135, D=0,15.
Заключение
В данном курсовом проекте произведен расчет модели системы автоматического регулирования расхода пара. Расчет исполнительного механизма, произведены настройки PID - регулятора. Рассчитанная САР смоделирована в среде Simulink пакета MATLAB. Данные моделирования нас вполне устраивают, так как достигнута основная цель задачи, о чем говорят показатели качества переходного процесса системы.