Давайте, начиная с этого момента, называть любую систему, способную производить осознаваемое Я, эго-машиной. Эго-машина необязательно должна быть живым существом: она может быть чем угодно, лишь бы обладала осознаваемой я-моделью. Вполне вероятно, что мы рано или поздно сможем сконструировать искусственное действующее лицо. Такая система будет обладать целевыми репрезентациями и сможет поддерживать собственное существование. Я-модель, возможно, даже позволит ей разумно использовать орудия. Если руку обезьяны можно заменить рукой робота, а мозг обезьяны может научиться удаленно управлять всем телом робота с помощью интерфейса мозг-машина, то должно быть возможным заменить и всю обезьяну. Почему бы роботу не переживать иллюзию резиновой руки? Или осознанные сновидения? Если у системы имеется модель тела, в пределах возможного находятся и иллюзии полной замены тела и выхода из тела.
Рассуждая об искусственном интеллекте и искусственном сознании, многие полагают, что существует всего два класса систем обработки информации: искусственные и естественные. Это не так. Выражаясь на философском жаргоне, концептуальное различие между искусственными и естественными системами не исчерпывающее и не эксклюзивное: то есть возможны разумные и/или сознающие системы, не принадлежащие ни к одной из этих категорий. Что касается другого устаревшего разграничения: «железо» против программы, — то у нас уже есть системы, использующие биологическое «железо», управляемое искусственной, (то есть созданной человеком) программой, и есть искусственное «железо», управляемое естественно развившимися программами.
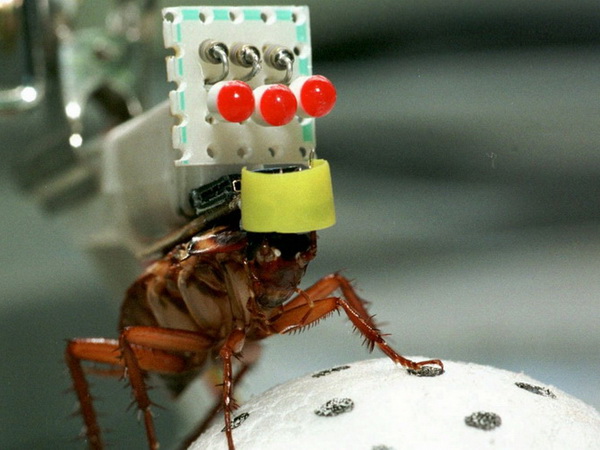
Рис. 17. RoboRoach, Роботаракан. Управление движением таракана через вживленный ранец-микроробот. Тараканий «ранец» содержит приемник, преобразующий сигнал с удаленного пульта в электрический стимул, подаваемый на антенны таракана. Это позволяет оператору приказать таракану остановиться, двигаться вперед, пятиться и поворачивать вправо или влево. На сегодняшний день возможно успешно управлять также крысами или летающими насекомыми, посылая сигнал напрямую в нервную систему. Фото: Associated Press.
Пример первой категории — это гибридные биороботы. Гибридная биоробототехника представляет собой новую дисциплину, использующую природное оборудование, не утруждая себя воссозданием того, что природа совершенствовала миллионы лет. Приближаясь к пределам возможностей компьютерных чипов, мы, возможно, будем все больше использовать органические, генинженерные устройства для сконструированных нами роботов и искусственных действующих лиц.
Пример второй категории — это использование программ, структура которых вдохновлена естественно развившимися нейронными сетями, для управления искусственными устройствами. Некоторые даже используют сами биологические нейронные сети: так, например, кибернетики из Редингского университета (Великобритания) показали, как можно управляють роботом посредством сети из трехсот тысяч настоящих крысиных нервных клеток1.
Другие примеры представляют собой классические искусственные нейронные сети для усвоения языков или те, что исследователи сознания, такие как Аксель Клеерманс из исследовательского отдела изучения познания в Брюссельском свободном университете, используют для моделирования метарепрезентационной структуры сознания и того, что он называет «вычислительными коррелятами»2. Два последних примера тоже представляют собой биоморфные и всего лишь полуискусственные системы обработки информации, поскольку их основополагающая функциональная архитектура взята у природы и использует методы обработки, развившиеся в ходе биологической эволюции. Они создают состояния «высшего порядка», которые, однако, не представляют собой состояния личности, — они полностью находятся на субличностном уровне.
Можно предположить, что вскоре мы будем обладать функционалистской теорией сознания, однако это не значит, что мы сумеем применить описанные теорией функции на небиологических системах-носителях. Искусственное сознание является не столько теоретической проблемой философии сознания, сколько проблемой технической — дьявол кроется в деталях. Настоящая проблема состоит в разработке не-нейронных устройств с подходящими каузальными силами, поэтому даже простейшие, минималистичные формы «синтетической феноменологии» могут оказаться труднодостижимыми — по чисто техническим причинам.
Первые самомоделирующие машины уже появились. Исследователи искусственной жизни давно начали симулировать эволюционный процесс, а теперь появилась и дисциплина под названием «эволюционная робототехника». Джош Бонгард с факультета компьютерных исследований в Вермонтском университете и его коллеги Виктор Зыков и Ход Липсон создали искусственную морскую звезду, которая постепенно выработала явную внутреннюю я-модель3. Их четырехногая машина использует отношение между движениями тела робота и полученными обратно измененными сигналами восприятия, чтобы сделать выводы о собственной структуре и затем, используя я-модель, организовать поступательное движение. Если ей удаляют часть ноги, машина вносит поправку в модель и разрабатывает альтернативный способ передвижения — она учится хромать. В отличие от упоминавшихся в главе 4 пациентов с фантомными конечностями, машина способна перестраивать представление о теле после потери конечности — то есть, в каком-то смысле, способна учиться. Как пишут ее создатели, она может «автономно восстанавливать собственную топологию на основе очень ограниченной предварительной информации» путем непрерывной оптимизации параметров результирующей я-модели. Морская звезда не только синтезирует внутреннюю я-модель, но и использует ее для генерации разумного поведения.
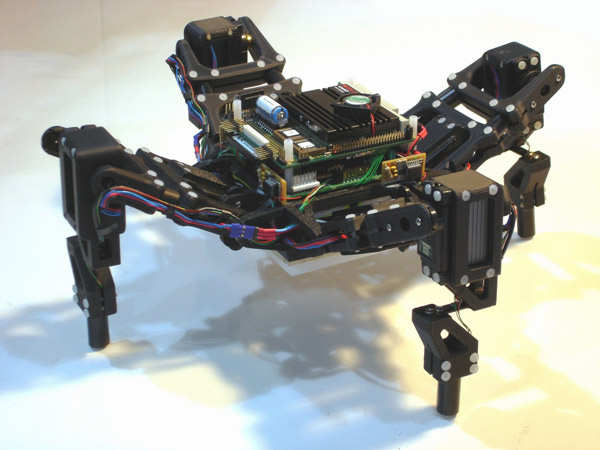
Рис. 18а. Морская звезда — четырехногий робот, способный ходить, используя внутреннюю модель себя, которую он создал и непрерывно совершенствует. Утратив ногу, он способен внести поправку во внутреннюю я-модель4. Фото: Джош Бонгард
Я-модели представляют собой изобретение естественной эволюции. Я-модель может быть неосознанной, она может развиваться, и она может быть создана в машине, подражающей процессу биологической эволюции. Суммируя: у нас уже есть машины не исключительно естественные и не исключительно искусственные. Давайте назовем такие системы постбиотическими. Вероятно, что первая не полностью биологическая форма сознательного чувства Я впервые будет реализована в таких постбиотических эго-машинах.