Если железобетонный монолит имеет толщину более полуметра, то его проблематично разрушить гидромолотом, а тем более гидроножницами. В этом случае как нельзя лучше подходят гидроклинья, являющиеся системами разрыва. Принцип работы ими таков: сначала алмазными коронками сверлятся отверстия, в которые вставляются гидроклинья; потом с двух противоположных сторон вдоль клиньев устанавливаются накладки; далее гидростанция создаёт давление на поршни, которые раздвигают накладки. Накладки изнутри давят на монолит с усилием в несколько десятков тонн. Разламывается не только бетон ― разрывается арматура.
Преимущества такого способа разрушения неоспоримы:
· - разрушение полностью контролируется оператором;
· - высокая мощность разрушения не сопровождается повышенным шумом и вибрациями;
· - он безопасен.
Дробители и измельчители
· Стоит отметить, что если гидромолоты разрушают бетон энергией удара, то гидроножницы делают это энергией сжатия. С дробилками в ковшах мы уже знакомы, по этим же принципам работает и любое другое оборудование для дробления. Часто эти установки стационарны, туда сверху загружаются очень большие куски монолита, которые разрушаются либо роторами, либо щёками.
· Для получения мелких фракций ещё на стадии работы экскаваторов применяют так называемыеизмельчители. Это навесное оборудование может быть закреплено либо на стреле, либо на рукояти экскаватора. Внешне они могут напоминать гидроножницы, но существуют и принципиальные различия: одна челюсть неподвижна и загнута для удобства подгребания обломков с земли. Помимо этого, ножницы обычно могут вращаться на 360°, так удобнее подбираться к объекту разрушения, измельчителям же, наоборот, удобнее сгребать обломки, если челюсть не вертится.
Взрывное оборудование для сноса
При этом способе сноса понадобятся буровые машины для шпуров под запал, источник тока или же компрессор, взрывчатые вещества, запальник, взрывная машинка, резак для разделения арматуры.
У нас этот способ пока ещё применяется крайне редко (много согласований), за рубежом же направленным взрывом сносятся все здания высотой более 35 метров. А ведь для аварийных сооружений это самый безопасный, быстрый и дешёвый способ сноса.
Захваты
Захваты служат не для разрушения. Их основная функция: подбирать обломки и относить либо в сторону, либо на транспортное средство для их дальнейшего вывоза. Виды захватов могут быть самыми разнообразными, главное, чтобы они могли захватить, поднять и удержать убираемые обломки.
Это может быть грейфер с двумя и более лопастями или зубьями, чаще всего приводимые в действие гидравликой, но бывает и электричеством. А может быть система из ковша и дополнительной крышкой к нему. Обе детали приводятся в действие гидравликой, действуют же наподобие руки: крышка как палец прижимает обломок к ладони-ковшу. Ковш можно использовать и для землеройных работ, в этом случае крышка-палец прижимается к стреле и не мешает рытью траншей или котлованов.
Как видим, существуют самые разнообразные приспособления для разрушения и сноса сооружений. Многообразие их продиктовано условиями, в которых приходится осуществлять снос, и прочностью разрушаемого материала. Ведь одно дело разрушить, допустим, мрамор, который является интрузивным известняком, и монолит из железобетона. Сейчас уже почти не найти то приспособление, которым крушили дома ещё только полвека назад, ― огромный железный шар на цепи, именующийся бабой. В то время работой по разрушению мог заниматься только специалист высокого класса. Нужен был высокий профессионализм, чтобы стрелой экскаватора можно было сделать нужный замах и попасть в строго определённое место стены. С фундаментами же приходилось работать отбойными молотками и кувалдами.
Система «Профиль-30»
1. Система «Профиль-30» является системой автоматического регулирования.
Система позволяет автоматически стабилизировать положение рабочего органа (РО) по
высотным отметкам, задаваемым направляющими (шнуром; обработанной полосой;
опорной плоскостью, образованной лучом лазера) и по углу установки РО в
поперечной плоскости. Система «Профиль-30» предназначена для автоматизации
автогрейдеров и других строительных дорожных машин (СДМ). Система может
устанавливаться на дреноукладчики, планировщики, асфальтоукладчики и другие
дорожные и мелиоративные машины.
Система «Профиль-30» позволяет обеспечивать высокое качество работ при
планировке хлопковых полей и рисовых чеков, нарезании кюветов с заданными
продольными уклонами, планировке верха дорожного полотна и слоев дорожной
одежды, оснований взлетно-посадочных полос, точном разравнивании верха и
балластных слоев железнодорожного полотна. Использование систем «Профиль-30»
сокращаетвремянапроизводстворабот,психофизиологические нагрузки на оператора.
2. Состав системы «Профиль-30»
В состав системы в зависимости от модификации входят: -пульт
управления;
-датчик угла для контроля углового положения РО относительно гравитационной
вертикали;
-датчик высоты щуповой для контроля высотного положения РО по отношению к
реперу (шнуру, проволоке, бордюру и т.п.);
-устройство перемещения фотоприемного устройства (ФПУ), предназначенное
для подъема и опускания фотоприемника лазерной системы;
-щуп для передачи информации от репера к чувствительному элементу датчика
высоты;
-два гидрораспределителя с электроуправлением (электрогидро-распределителя
ЭГР).
Общая электрическая схема системы «Профиль-30» с датчиком угла и датчиком
высоты приведена на рис. 1.

Рис. 1. Схема электрическая общая системы «Профиль-30»: А1 -
пульт управления; А2, A3 - электрогидрораспределители; А4 -
датчик угла маятниковый; А5 - датчик высоты щуповой
Пультуправленияпредназначендляформированиякомандуправленияисполнительными
Механизмамигидроприводасистемыисодержитдваканалауправления.
На лицевой панели пульта (рис. 2) расположены:
- тумблеры включения питания каналов стабилизации высотного 8 и углового 14
положения РО;
- задатчики высотного 1 и углового 6 положения РО;
- кнопки 2 и 5 ручного управления ЭГР;
- кнопки 7 подъема и опускания устройства перемещения
ФПУ;
- регуляторы чувствительности каналов стабилизации высотного 9 и углового 13
положения РО;
- тумблеры «Настройка-Работа» каналов стабилизации высотного 10 и углового
12 положения РО;
- переключатель 11 режимов работы системы;
- предохранители (на рис. 2 не показаны);
- индикаторы 3 и 4 включения ЭГР.

УстройствоперемещенияФПУпредназначенодляподъемаиопускания
фотоприемника лазерной системы. Пульт устанавливается на кронштейне около рабочего
места оператора. «Профиль-30» позволяет работать с лазерной системой. Все элементы
системы «Профиль-30» и лазерной системы соединяются между собой посредством
кабелей.
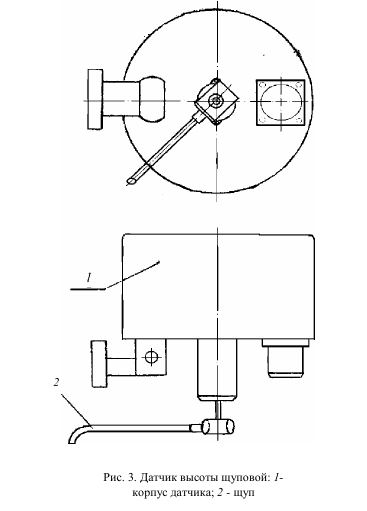
Датчик высоты щуповой (рис. 3) является прибором, преобразующим высотное
положение корпуса 1 относительно жёсткой направляющей, являющейся репером (троса,
опорной поверхности), в электрический сигнал. В качестве чувствительного элемента
используется специальный съемный щуп 2, укреплённый на валу с опорой на двух
шарикоподшипниках. На другом конце вала укреплён экран, взаимодействующий с
катушкамииндуктивноститрансформаторногопреобразователя.Врезультате
взаимодействия на выходе преобразователя появляется сигнал, пропорциональный углу
поворота вала датчика.
Датчик угла маятниковый (рис. 4) является прибором, преобразующим угловые
положения корпуса 1 относительно гравитационной вертикали в электрический сигнал.
Чувствительным элементом датчика является коромысло 2, подвешенное на валу на
шарикоподшипниках. На валу коромысла укреплён экран, взаимодействующий с ка-
тушками преобразователя. При повороте корпуса датчика относительно коромысла
изменяется взаимное положение экрана и катушек, что приводит к пропорциональному
изменению выходного сигнала преобразовательного блока.

3. Режимы работы системы «Профиль-30»
Переключателем на лицевой панели пульта управления системой обеспечивается 4
режима автоматического управления РО:
1) с двумя датчиками высоты по двум жестким направляющим, расположенным по
обе стороны машины;
2) с датчиком угла и датчиком высоты по жесткой направляющей, расположенной
с правой стороны машины;
3) с датчиком угла и датчиком высоты по жесткой направляющей, расположенной
с левой стороны машины;
4) с датчиком угла и лазерной системой.
4. Принцип работы системы «Профиль-30»
Принцип работы каналов высотной и угловой стабилизации положения РО одинаков
и наглядно иллюстрируется упрощенной функциональной схемой на рис. 5.
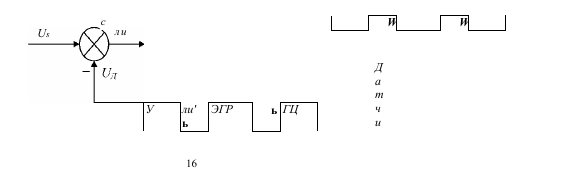
Рис. 5. Функциональная схема канала высотной
(угловой) стабилизации положения РО
На схеме обозначено: с -сумматор; У - усилитель;
ЭГР - электрогидрораспределитель;
ГЦ - гидроцилиндр;
h - высотное положение РО;
у - угловое положение РО;
U3 - напряжение задатчика, пропорциональное заданной высоте или углу наклона
РО;
ид - напряжение датчика, пропорциональное фактической высоте или углу
наклона РО в поперечной плоскости.
Для формирования регулирующего воздействия сравниваются заданное высотное
(угловое) положение РО с фактическим высотным (угловым) положением, т.е.
сравниваются напряжения на выходе за-датчика и датчика.
Для сравнения напряжений U3 и ид сумматором пульта управления определяется
их разность:
Ли= U3-UM.
(1)
Напряжение Ли может быть как положительным, так и отрицательным в
зависимости от соотношения между U3 и ид. Далее это напряжение усиливается
усилителем У и поступает на ЭГР, имеющий золотник с тремя фиксированными
положениями, две обмотки и два диода. Электрическая схема ЭГР представлена на рис.
6.
При A U=0 золотник находится в нейтральном положении, ЭГР закрыт. В этом случае
Фактическое положение РО соответствует заданному, поэтому регулирующее
Воздействие не AU' формируется.
При AUi=0 учитывается полярность этого напряжения. В зависимости от полярности AU' ток
протекает по одной из обмоток ЭГР (см. рис. 6), при этом золотник в ЭГР занимает
такое рабочее положение, при котором гидроцилиндры перемещают РО в направлении
уменьшения рассогласования A U.
Работа каналов угловой и высотной стабилизации РО отличается тем, что при
стабилизации высотного положения работают два ЭГР,
Рис. 6. Электрическая схема
управляя обоими гидроцилиндрами, а при стабилизации
электрогидрораспределителя углового положения работает только один ЭГР, управляющий одним гидроцилиндром. Каждый канал содержит регулятор чувствительности
(см. рис.2).
Чувствительность канала будет максимальной, если регулятор повернут против часовой стрелки до упора. При такой чувствительности ширина зоны нечувствительности минимальна, что обеспечивает наибольшую точность. Однако вследствие значительной массы отвал и рама, с помощью которой он крепится к машине, обладают инерционными свойствами, что при определенных h<t свойствах грунта может привести к возникновению
колебаний (рис. 7). Чтобы избавиться от колебаний, чувствительность следует уменьшить.
Но при этом увеличится ширина зоны нечувствительности и уменьшится точность.
