Углы: прецессии ¾  = (t), нутации ¾
= (t), нутации ¾  = (t), ротации ¾ j = j (t)
= (t), ротации ¾ j = j (t)
-
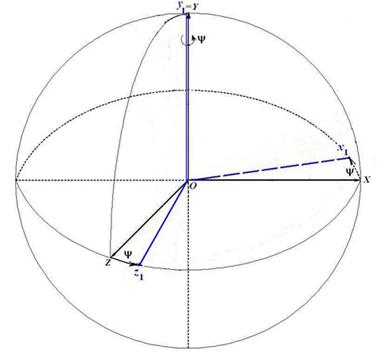 Переход от осей неподвижной системы координат [X] к осям системы [ x 1] осуществляется поворотом на угол прецессии вокруг неподвижной оси OY ¾ прецессии системы [ X ]
Переход от осей неподвижной системы координат [X] к осям системы [ x 1] осуществляется поворотом на угол прецессии вокруг неподвижной оси OY ¾ прецессии системы [ X ]
[X] ={a2y} т [ x 1 ] (1), где {a2y} т =  (2).
(2).
- Переход от осей системы[ x 1] к осям системы[ x 2] осуществляется поворотом на угол нутации вокруг оси
 системы [ x 1 ]
системы [ x 1 ]
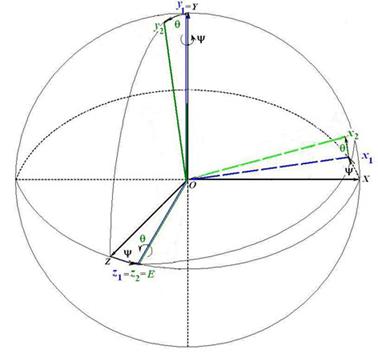
[ x 1 ] = {a3q} т [ x 2 ] (3), где матрица {a3q} т =  (4).
(4).
 3. Переход от осей системы [ x 2] к осям системы[ x ] - ¾ поворотом на угол ротации (собственного вращения)
3. Переход от осей системы [ x 2] к осям системы[ x ] - ¾ поворотом на угол ротации (собственного вращения)  вокруг оси
вокруг оси  системы [ x 2 ]
системы [ x 2 ]
[ x 2 ]= {a2j}т [ x ] (5), где поворотная матрица {a2j}т имеет вид матрицы (2) ¾ {a2y} т
{a2j} т =  (6).
(6).
Подставляя в соотношение (1) ¾ [X] ={a2y} т [ x 1 ] соотношение (3) ¾ [ x 1 ] = {a3q}т [ x 2 ] , в котором [ x 2 ] представлено в виде (5) ¾ [ x 2 ] = {a2j }т [x], получаем
[X] ={a2y} т {a3q} т {a2j}т [ x ]. (7)
Или  где искомая поворотная матрица
где искомая поворотная матрица  является произведением трех матриц поворота (2), (4), (6), а именно:
является произведением трех матриц поворота (2), (4), (6), а именно:
{ ay,q,j } т = = {a2y} т {a3q } т {a2j } т =
= =
 (8)
(8)
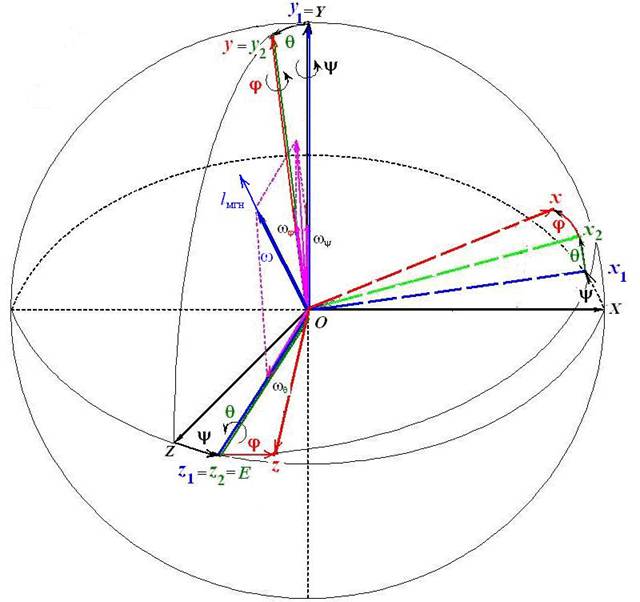
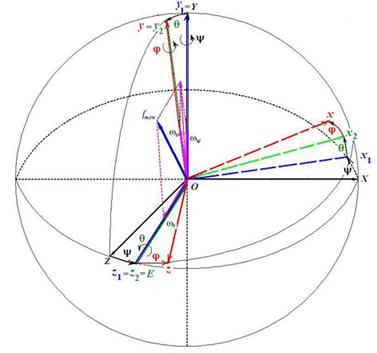
Твердое тело с одной неподвижной точкой в общем случае участвует одновременно в трех вращениях, векторы угловых скоростей которых с использованием углов Эйлера имеют вид:
 – вектор угловой скорости прецессии;
– вектор угловой скорости прецессии;
 – вектор угловой скорости нутации;
– вектор угловой скорости нутации;
 – вектор угловой скорости ротации (собственного вращения).
– вектор угловой скорости ротации (собственного вращения).
Здесь  – единичные орты осей вращения OY, OE, Oy соответственно.
– единичные орты осей вращения OY, OE, Oy соответственно.
Поскольку названные оси пересекаются в точке О,тоабсолютное движение тела в каждый момент времени есть вращение вокруг мгновенной оси, проходящей через точку пересечения вышеназванных осей с мгновенной угловой скоростью  , равной геометрической сумме векторов угловых скоростей составляющих:
, равной геометрической сумме векторов угловых скоростей составляющих:
 .
.
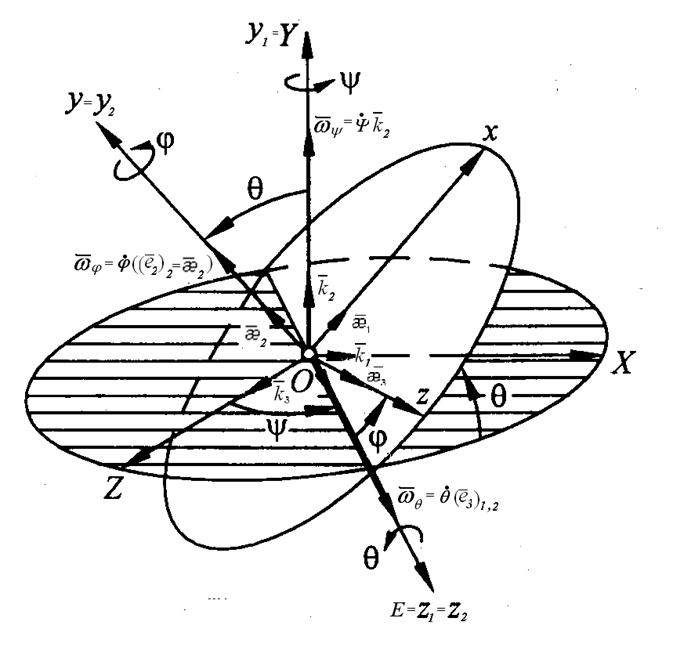
Случай регулярной прецессии – это такое вращение твердого тела вокруг неподвижной точки, при котором (рис. 4.2) во все время движения остаются постоянными:
· угол нутации  ,
,  ;
;
· угловые скорости прецессии, ротации и мгновенная угловая скорость ( );
);
 ;
;
·  угловое ускорение
угловое ускорение  .
.
Величина и напраление вектора мгновенной угловой скорости определяются думя способами:
· 1) по ее составляющим  ;
;
· 2) использовать мгновенную ось вращения  , которую в дальнейшем будем для краткости обозначать
, которую в дальнейшем будем для краткости обозначать  . По известной скорости
. По известной скорости  какой-либо точки М твердого тела и положению оси
какой-либо точки М твердого тела и положению оси  находят величину :
находят величину :  , где
, где  – перпендикуляр, опущенный из точки М на ось .
– перпендикуляр, опущенный из точки М на ось .
· 3. Определить угловое ускорение  твердого тела. В случае регулярной прецессии и является закрепленным в точке О вектором, положительное направление которого определяется как результат векторного произведения.
твердого тела. В случае регулярной прецессии и является закрепленным в точке О вектором, положительное направление которого определяется как результат векторного произведения.
· 4. Определить скорости произвольных точек твердого тела по формуле Эйлера  , величина которой
, величина которой  .
.
· 5. Определить ускорения  произвольных точек твердого тела по формуле
произвольных точек твердого тела по формуле  , где
, где  - вектор осестремительного ускорения, величина которого
- вектор осестремительного ускорения, величина которого  ;
;  - вектор вращательного ускорения, величина которого
- вектор вращательного ускорения, величина которого  .
.
· Так как  всегда направлено от точки по к оси , можно не пользоваться векторной формой для . Что же касается
всегда направлено от точки по к оси , можно не пользоваться векторной формой для . Что же касается  , то его следует находить только по векторной форме.
, то его следует находить только по векторной форме.
· Поскольку при вращении около полюса вектор неколлинеарен , то и , вообще говоря, не являются перпендикулярными векторами, поэтому определение  должно производиться после построения векторов на чертеже, и величина ускорения будет равна
должно производиться после построения векторов на чертеже, и величина ускорения будет равна
·  .
.
· Для точек, лежащих на оси ротации твердого тела, справедливы также следующие зависимости:
· и  ,
,
· где  – нормальное ускорение;
– нормальное ускорение;  – касательное ускорение, при регулярной прецессии
– касательное ускорение, при регулярной прецессии  =0.
=0.
· Все векторы, лежащие в плоскости OXY (плоскости чертежа), должны быть изображены в этой плоскости; направление же других векторов должно быть указано в тексте.