После проведения расчетов и выбора гидравлической аппаратуры возможна разработка динамической модели системы, с помощью которой имеется возможность исследовать поведение системы в динамике.
Для составления модели необходимо рассчитать передаточные функции дросселирующего распределителя, рабочего органа (гидроцилиндра), при необходимости корректирующих устройств. Ожидаемый переходной процесс до установления значения перемещения поршня гидроцилиндра в напорном клапане – апериодический без перерегулирования, с малым временем переходного процеса.
Гидроприводы, оснащенные гидроаппаратурой с пропорциональным электрическим управлением, имеют стандартные узлы: электронный усилитель – сумматор БУ2110 и пропорциональный магнит ПЭМ6. Передаточные функции указанных гидроаппаратов:

Передаточная функция дросселирующего распределителя с пропорциональным электрическим управлением
Дросселирующий распределитель с пропорциональным электрическим управлением состоит из следующих элементов: пропорционального электромагнита ПЭМ6, гидравлического моста и цилиндрического золотника, выполняющего функции двух дросселей, установленных на входе и выходе из исполнительного органа привода.
Передаточная функция гидравлического моста с обратной связью

где Кп – коэффициент передачи,

Расход через сопло при среднем положении заслонки

где m - коэффициент расхода, m=0,7;
dс – диаметр сопла;
х0 – максимальное смещение заслонки;
Рк – командное давление, подводимое к элементу “сопло-заслонка”,
 .
.
Коэффициенты усиления:
по расходу –


по давлению –

Коэффициент обратной связи

Эффективная площадь основного золотника

где dз – диаметр золотника.
Динамическая жесткость потока жидкости в щели золотника

где РА – расчетное давление на выходе из насоса.
Постоянная времени гидравлического моста
 ,
,
где m3 – масса золотника.
Относительный коэффициент демпфирования колебаний
 где f – приведенный коэффициент вязкого трения,
где f – приведенный коэффициент вязкого трения,
 .
.

Передаточная функция золотника
Значение Кз определяется:
где Q – подводимый к дросселирующему распределителю расход.
Следовательно, передаточная функция распределителя с пропорциональным электрическим управлением (электрогидроусилителя)

Передаточная функция гидроцилиндра.

где Кгц – коэффициент передачи,

Постоянная времени гидроцилиндра

где m – масса подвижных частей.
Сгц – коэффициент динамической жесткости гилроцилиндра,

где Епр – приведенный модуль упругости стенок гидроцилиндра и жидкости,

Lгц – длина хода поршня гидроцилиндра.
Относительный коэффициент демпфирования колебаний

где f – приведенный коэффициент вязкого трения,
 .
.
Передаточная функция гидроцилиндра может быть представлена:



Рисунок 4.1 – Динамическая модель системы синхронизации траверсы гидравлического пресса.
Динамическая модель построена в пакете MATHLAB5.1, полученный переходной процесс работы системы при подаче управляющего воздействия представлен на рисунке 4.2.
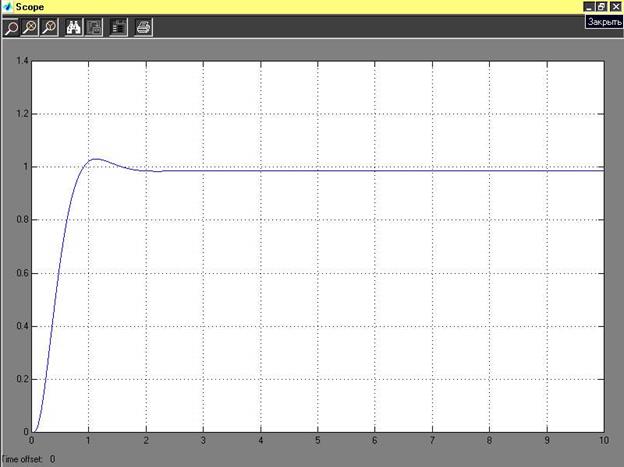
Рисунок 4.2 – Переходной процесс работы системы
Т.о. система синхронизации как объект управления является устойчивой системой, время переходного процесса менее 1с.