РОССИЙСКАЯ ОТКРЫТАЯ АКАДЕМИЯ ТРАНСПОРТА
Кафедра: «Железнодорожная автоматика, телемеханика и связь»
Факультет: «Управление процессами перевозок»
КУРСОВОЙ ПРОЕКТ
ПО ДИСЦИПЛИНЕ: «Теория автоматического управления»
Тема курсовой работы: «Исследование линейных непрерывных САУ»
Выполнил: студент 4-го курса
Вариант 15
Проверил: доц.
Иконников С.Е.
Москва 2017 г.
Содержание
Содержание. 2
Введение. 3
Задание на курсовую работу. 4
Часть I 7
Задание 1. 7
Задание 2. 8
Задание 3. 10
Задание 4. 11
Задание 5. 13
Задание 6. 14
Задание 7. 15
Задание 8. 16
Часть II 17
Задание 1. 17
Задание 3. 19
Выводы.. 24
Литература. 25
Введение
Теория автоматического управления (ТАУ) является базовой основой кибернетики или науки об управлении – одной из относительно молодых областей науки. Теория управления, хотя и прошла яркий путь своего развития, но в настоящее время продолжает интенсивно развиваться в сторону создания теории интеллектуальных систем управления – предельной формации парадигмы теории управления.
Прикладную или инженерную ТАУ сегодня именуют «классической», подчеркивая этим определенную завершенность форм ее развития как науки об управлении. Классическая ТАУ, преследуя цель «оптимизации в малом», решает задачи оптимизации и адаптации при малых отклонениях относительно заданного режима работы системы управления.
Основы «современной» ТАУ идеологически заложены в «классической» ТАУ и составляют с ней неразрывную связь. Современная ТАУ, преследуя цель «оптимизации в целом», применительно, в основном, к системно-сложным ОУ, превращается в совокупность методов и средств, осуществляющих эффективное использование всех ресурсов системы при многокритериальной интеллектуальное управление и составляющих основу теории интеллектуальных систем управления. Характерной обобщающей чертой последних является максимально оптимизации процессов в целом в условиях, как правило, частичной неопределенности информации о свойствах ОУ и среде его функционирования.
Теория автоматического управления (ТАУ) относится к классу важнейших общеспециальных дисциплин, входящих во все типовые программы инженерного образования, ТАУ изучает процессы управления, методы исследования и основы проектирования систем автоматического управления (САУ). ТАУ изучает принципы построения САУ, закономерности протекающих в них процессов в целях построения работоспособных и точных САУ. Методами ТАУ осуществляются анализ и синтез САУ.
Задание на курсовую работу
Тема курсовой работы: «Исследование линейных непрерывных САУ»
I. Исследование динамических свойств и характеристик линейных САУ
Передаточная функция динамического звена САУ имеет следующий вид:
 где: Т, K - постоянные параметры звена.
где: Т, K - постоянные параметры звена.
Значения параметров звена представлены в таблице 1:
Таблица 1.
| Номер варианта | |||||||||||
| Последняя цифра шифра | K | ||||||||||
| Предпоследняя цифра шифра | Т, сек. | 0,9 | 0,8 | 0,7 | 0,6 | 0,5 | 0,4 | 0,2 | 0,3 |
1. Определить исходное дифференциальное уравнения динамического звена, описывающее вход и выход (в общем виде и для выбранного варианта).
2. Найти оригинал импульсной характеристики (весовой функции) и переходной характеристики исследуемого динамического звена (в общем виде и для выбранного варианта).
3. При помощи компьютерного моделирования построить график переходной характеристики звена.
4. Определить частотную характеристику, амплитудно-частотную характеристику (АЧХ); фазово-частотную характеристику (ФЧХ) звена (в общем виде и для выбранного варианта).
5. Найти передаточную функцию замкнутой САУ, в которую входит исследуемое динамическое звено (в общем виде и для выбранного варианта).
6. Провести анализ устойчивости замкнутой САУ (в общем виде и для выбранного варианта).
7. Результаты анализа устойчивости для выбранного варианта подтвердить моделированием на ЭВМ через построение переходной характеристики замкнутой САУ.
8. По полученной переходной характеристике определить показатели качества замкнутой САУ (для выбранного варианта).
II. Анализ и синтез линейных САУ
Передаточная функция объекта управления имеет следующий вид:
 где: a, b, c – постоянные коэффициенты.
где: a, b, c – постоянные коэффициенты.
Значения коэффициентов представлены в таблице 2:
Таблица 2.
| Номер варианта | |||||||||||
| Последняя цифра шифра | a | 0,5 | 1,5 | 2,5 | 0,5 | ||||||
| Предпоследняя цифра шифра | b | ||||||||||
| Последняя цифра шифра | c |
1. Определить условия устойчивости замкнутой САУ с таким объектом управления (в общем виде и для выбранного варианта). Результаты анализа устойчивости для выбранного варианта подтвердить моделированием на ЭВМ через построение переходной характеристики замкнутой САУ (для выбранного варианта).
2. В случае устойчивости замкнутой САУ – определить показатели качества системы по полученной переходной характеристике (для выбранного варианта).
3. В случае неустойчивости замкнутой САУ:
А) Определить условия устойчивости замкнутой САУ при введении последовательного корректирующего звена внутри контура управления в виде П-регулятора (в общем виде и для выбранного варианта).
Б) После выбора параметров регулятора для обеспечения устойчивости замкнутой САУ при помощи компьютерного моделирования определить показатели качества системы по переходной характеристике (для выбранного варианта).
В) При введении в контур управления САУ корректирующего звена в виде ПИ-регулятора экспериментально (моделированием) найти такие настроечные параметры регулятора, при которых показатели качества системы будут не хуже, чем в пункте Б.
Г) При введении в контур управления САУ корректирующего звена в виде ПД-регулятора экспериментально (моделированием) найти такие настроечные параметры регулятора, при которых показатели качества системы будут не хуже, чем в пункте Б.
Часть I
Задание 1
В данной работе объектом исследования является типовое динамическое звено – инерционно-интегрирующее, общий вид передаточной функции (ПФ) которого:  .
.
С учётом числовых коэффициентов, соответствующих заданному 15 варианту K = 8; T = 1, ПФ звена примет вид:  .
.
Найдём дифференциальное уравнение звена. Ранее мы определили, что ПФ звена может быть записана в виде:  , где Y(p) и X(p) – изображения по Лапласу выходного и входного сигналов соответственно. Запишем операторное уравнение звена:
, где Y(p) и X(p) – изображения по Лапласу выходного и входного сигналов соответственно. Запишем операторное уравнение звена:

Заменяя в операторном уравнении оператор Лапласа р на операцию дифференцирования d/dt, запишем искомое диф. уравнение звена в общем виде:
С учётом числовых коэффициентов, соответствующих 15 варианту, диф. уравнение звена примет вид:

Задание 2
Найдём уравнения временных – импульсной и переходной характеристик исследуемого звена.
Для того, чтобы найти уравнение импульсной характеристики w(t) (весовой функции), нужно выполнить обратные преобразования Лапласа исходной ПФ:

Воспользовавшись таблицей обратных преобразований Лапласа [1], находим уравнение импульсной характеристики инерционно-интегрирующего звена в общем виде:

С учётом числовых коэффициентов, соответствующих 15 варианту, уравнение импульсной характеристики примет вид:

Для того, чтобы найти уравнение переходной характеристики h(t), нужно домножить ПФ звена на 1/р (изображение единичного ступенчатого сигнала по Лапласу) и выполнить обратные преобразования Лапласа получившегося выражения:

Воспользовавшись таблицей обратных преобразований Лапласа [1], находим уравнение переходной характеристики инерционно-интегрирующего звена в общем виде:

С учётом числовых коэффициентов, соответствующих 15 варианту, уравнение переходной характеристики примет вид:

Задание 3
Воспользуемся пакетом MatLAB Simulink для построения переходной характеристики звена:

Рисунок 1 – Структурная схема в MatLAB Simulink
(Примечание. В пакете MatLAB Simulink оператор Лапласа обозначается буквой s).
Выполним моделирование:

Рисунок 2 – Переходная характеристика инерционно-интегрирующего звена
Задание 4
Выведем уравнения частотных характеристик звена.
Исходная ПФ звена: .
Для расчёта частотных характеристик перейдём к комплексной частотной характеристике (КЧХ), произведя замену оператора Лапласа р→jω, где j – мнимая единица; ω – частота:

Избавимся от мнимой составляющей в знаменателе, домножив числитель и знаменатель КЧХ на комплексно-сопряжённый знаменателю полином:

Данное выражение КЧХ можно представить в виде:  , где U(ω) и V(ω) – действительная и мнимая составляющие КЧХ соответственно. Выделяем действительную и мнимую составляющую:
, где U(ω) и V(ω) – действительная и мнимая составляющие КЧХ соответственно. Выделяем действительную и мнимую составляющую:

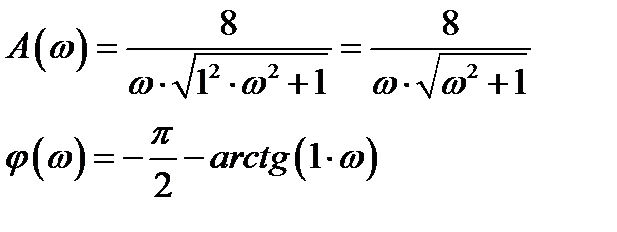
Запишем уравнение амплитудно-частотной характеристики (АЧХ):

Уравнение фазовой частотной характеристики звена не зависит от коэффициента передачи K, и может быть записано через постоянную времени звена: [7]

С учётом числовых коэффициентов, соответствующих 15 варианту, уравнение частотных характеристик примут вид:
Задание 5
Зная эквивалентную ПФ звена , найдём ПФ замкнутой САУ, в которую входит данное звено.

Рисунок 3 – Структурная схема замкнутой САУ
Воспользовавшись правилами структурных преобразований [2], находим ПФ замкнутой системы:

С учётом числовых коэффициентов, соответствующих 15 варианту, уравнение ПФ замкнутой САУ примет вид:

Задание 6
Оценим устойчивость замкнутой САУ.
Выделяем характеристический полином замкнутой системы – знаменатель ПФ:  .
.
Данный полином является полиномом 2 порядка.
По критерию Гурвица, для систем с характеристическим полиномом 2 порядка необходимым и достаточным условием устойчивости является положительность всех коэффициентов характеристического полинома.
В нашем случае  данное условие выполняется, следовательно, замкнутая САУ устойчива.
данное условие выполняется, следовательно, замкнутая САУ устойчива.
Задание 7
Подтвердим устойчивость замкнутой САУ моделированием:

Рисунок 4 – Структурная схема замкнутой САУ
Выполним моделирование переходного процесса:

Рисунок 5 – Переходная характеристика замкнутой САУ
Переходная характеристика замкнутой САУ устанавливается в установившееся значение h(∞) = 1, следовательно, замкнутая САУ устойчива.
Задание 8
По переходной характеристике, представленной на рисунке 5, определяем показатели качества переходного процесса:
Установившееся значение h(∞) = 1, следовательно, статическая ошибка равна нулю.
Переходный процесс колебательный, число колебаний равно 3.
Время регулирования (вхождения выходной величины в 5% коридор своего установившегося значения): tp = 5,85 c.
Перерегулирование:

Часть II
Задание 1
ПФ заданного объекта управления:

Пользуясь уже известным на по пункту 1.5 правилом расчёта ПФ замкнутой САУ, определяем ПФ замкнутой системы:

Характеристический полином замкнутой системы является полиномом 2 порядка.
По критерию Гурвица, для систем с характеристическим полиномом 2 порядка необходимым и достаточным условием устойчивости является положительность всех коэффициентов характеристического полинома.
Соответственно, условие устойчивости:

ПФ разомкнутой системы с учётом числовых коэффициентов, соответствующих 15 варианту:

ПФ замкнутой системы с учётом числовых коэффициентов, соответствующих 15 варианту:

Характеристический полином замкнутой системы (знаменатель ПФ) содержит отрицательный коэффициент при р, следовательно, замкнутая система не будет устойчива.
Подтвердим неустойчивость моделированием в пакете MatLAB Simulink:
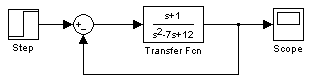
Рисунок 6 – Структурная схема замкнутой САУ
Выполним моделирование переходного процесса:

Рисунок 7 – Переходная характеристика замкнутой САУ
Переходная характеристика расходящаяся, следовательно, замкнутая система неустойчива.
Задание 3
Поскольку замкнутая система неустойчива, нужно обеспечить устойчивость замкнутой системы вводом последовательного П-регулятора.
Ранее мы нашли ПФ разомкнутой системы:
Коэффициент при р в знаменателе равен –7; коэффициент при р в числителе равен 1. Поскольку по критерию Гурвица все коэффициенты характеристического полинома должны быть положительными, коэффициент передачи последовательного П-регулятора должен быть больше 7 (при коэффициенте П-регулятора равным 7, замкнутая система будет находиться на колебательной границе устойчивости, т.к. коэффициент при р в знаменателе обратится в 0). Выберем коэффициент K = 10:

Рисунок 8 – Структурная схема замкнутой САУ c П-регулятором
Выполним моделирование переходного процесса:

Рисунок 9 – Переходная характеристика замкнутой САУ с П-регулятором
По переходной характеристике, представленной на рисунке 9, определяем показатели качества переходного процесса:
Установившееся значение h(∞) = 0,455, следовательно, статическая ошибка равна 0,545.
Переходный процесс колебательный, число колебаний равно 2.
Время регулирования (вхождения выходной величины в 5% коридор своего установившегося значения): tp = 2,72 c.
Перерегулирование:

Введём ПИ-регулятор с параметрами Ки = 15; Кп = 20.

Рисунок 10 – Структурная схема замкнутой САУ c ПИ-регулятором
Выполним моделирование переходного процесса:

Рисунок 11 – Переходная характеристика замкнутой САУ с ПИ-регулятором
По переходной характеристике, представленной на рисунке 11, определяем показатели качества переходного процесса:
Установившееся значение h(∞) = 1, следовательно, статическая ошибка равна нулю.
Переходный процесс колебательный, число колебаний равно 1.
Время регулирования (вхождения выходной величины в 5% коридор своего установившегося значения): tp = 6 c.
Перерегулирование:

Введём ПД-регулятор с параметрами Кд = 0.0001; Кп = 100.

Рисунок 12 – Структурная схема замкнутой САУ c ПД-регулятором
Выполним моделирование переходного процесса:
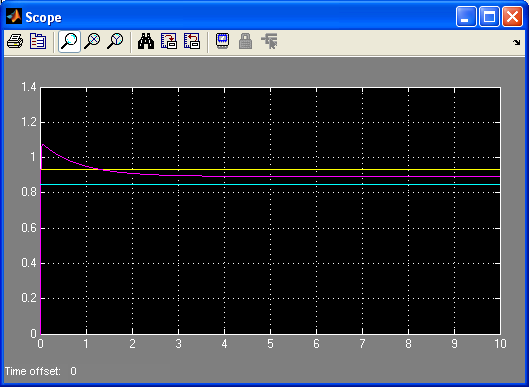
Рисунок 13 – Переходная характеристика замкнутой САУ с ПД-регулятором
По переходной характеристике, представленной на рисунке 13, определяем показатели качества переходного процесса:
Установившееся значение h(∞) = 0,88, следовательно, статическая ошибка равна 0,12.
Переходный процесс апериодический с забросом.
Время регулирования (вхождения выходной величины в 5% коридор своего установившегося значения): tp = 1,3 c.
Перерегулирование:

Выводы
В первой части работы произведено знакомство с инерционно-интегрирующим звеном. В общем виде и с учётом числовых коэффициентов заданного варианта составлено дифференциальое уравнение звена, найдены уравнения временных характеристик; аналитически выведены уравнения частотных характеристик.
С помощью пакета MatLAB Simulink построена переходная характеристика звена; а также построена характеристика САУ, состоящей из заданного звена, охваченного обратной связью. Определены параметры переходного процесса системы.
Во второй части произведено исследование звена второго порядка. Анализ показал, что замкнутая система будет неустойчива.
Найдено минимальное значение последовательного регулятора, ввод которого обеспечит устойчивость замкнутой системы. Экспериментальным путём определены параметры ПИ-регулятора и ПД-регулятора, при которых обеспечиваются качественные переходные процессы. Отметим, что ПИ-регулятор замедляет переходный процесс в системе. Однако, интегральная составляющая ПИ-регулятора позволяет полностью исключить статическую ошибку.
Литература
1. Душин С.Е., Зотов И.С., Имаев Д.Х. и др. Теория автоматичесекого управления/Учебник для вузов: Под ред. В.Б. Яковлева.- М.:Высш. шк., 2009,-567 с.;
2. Воронов А.А., Дмитриева Н.Д., Ким Д.П., и др. Теория автоматического управления. Ч.1. Теория линейных систем автоматического управления/Под ред. А.А. Воронова.- М.: Высш. шк., 1986.- 367 с.;
3. Современные методы проектирования систем автоматического управления. Анализ и синтез/Под ред. Б.Н. Петрова, В.В. Солодовникова, Ю.И. Топчеева, М.: Машиностроение, 1967, 704 с.;
4. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1975.
5. https://vunivere.ru/work5886;
6. https://drive.ispu.ru/elib/lebedev/7.html;
7. https://studopedia.ru/2_10476_tipovie-dinamicheskie-zvenya-i-ih-harakteristiki.html;