Структурный анализ механизма. Определение геометрических размеров, звеньев механизма.
 Исходные данные:
Исходные данные:
Н1=180 мм.
ОА=r=90 мм.
АС=98 мм.
β°=55°
CF=ℓ2=245 мм.
AS2=101 мм.
CS4=110 мм.
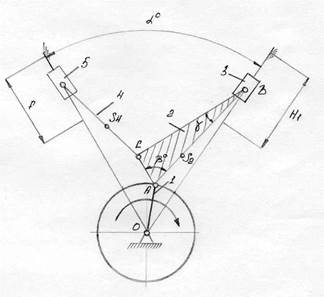
α°=50° Рис.1- схема ДВС
D=140 мм.
АВ= λ·ОА= 3,5·90= 315мм
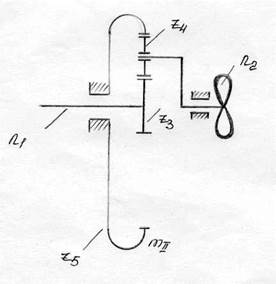 z1=12
z1=12
z2=24
mI=2,5 мм.
mII=4 мм. m1=7 кг
m2=6 кг m3=9 кг
m4=3,5 кг m5=9 кг
Js2= 0,1 кг*м2 n1=2950 об/мин
Js4= 0,1 кг*м2 n2=1320 об/мин
λ=3,5 J01= 0,06 кг*м2
 γ=85º
γ=85º
h= 4мм Рис.2 – схема планетарного редуктора
φy=60º
φ∂=0º
φB=60º
Структурный анализ механизма.
Кривошипно-шатунный механизм V-образного ДВС состоит из 5 подвижных звеньев: О-стойка; 1- кривошип ОА; 2 и 4 – шатуны; 3 и 5 ползуны (поршни), и 7 кинематических пар: I – стойка-кривошип ОА; II – кривошип ОА шатун АВС; III – шатун АВ – ползун В; IV – шатун В – стойка; V - шатун АВС – шатун CF; VI - шатун CF – поршень F; VII - поршень F – стойка.
Все кинематические пары – низшие. Подвижных звеньев n=5; число низших кинематических пар Р5=7, Р4=0. степень подвижности определяем по формуле Чебышева: WIII=3n-2p5-p4=3·5-2·7=1
Согласно классификации Артоболевского данный механизм состоит из механизма 1 класса (стойка-кривошип) и структурных групп 2-го класса второго порядка (группа 5, 4 и группа 2, 3). Поэтому механизм является механизмом 2 класса, второго порядка.
По классификации Асура данный механизм является механизмом1 класса, второго порядка.
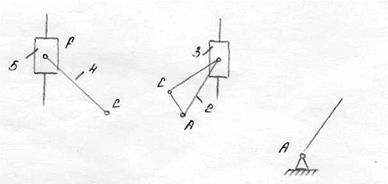
 1 кл 1 пор по Асс
1 кл 1 пор по Асс
1 кл 1 пор по Арт
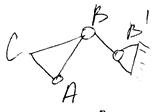
Рис.3 – группы Ассура
Кинематическое силовое исследование механизма.
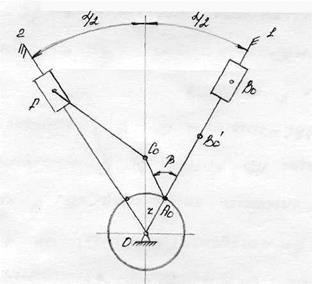 2.1 Планы положений механизма.
2.1 Планы положений механизма.
1. Под углами  к вертикали проводим направляющие 1 и 2, проходящие через центр вращения кривошипа.
к вертикали проводим направляющие 1 и 2, проходящие через центр вращения кривошипа.
2. Из центра О – вращения кривошипа ОА1 радиусами, равными длине (ℓ+r) и (ℓ-r) отмечаем  – верхнее и
– верхнее и  - нижнее крайнее положение поршня
- нижнее крайнее положение поршня  .
.
Рис.4
3. Траектория пальца А кривошипа от точки А0 делим на 12 равных частей и из полученных точек А1, А2, … А11 отмечаем положения В1, В2, … В11 на линии О1.
Соединяем полученные точки А1, А2, … А11 с центром О и соответствующими точками В1, В2, … В11.
4. Определяем положение точек С кривошипа АВС для чего откладываем угол β и расстояние АС.
5. Из центров С радиусом CF делаем засечки (положение поршня F) на траектории движения.
6. Соединяем точки С и F, находим положение кривошипа CF и поршня F.
Таким образом получаем 12 планов положений механизма, соответствующие разным положениям кривошипа ОА.
2.2 Определение линейных скоростей точек механизма.
1. Угловая скорость вращения кривошипа.


2. Скорость точки А кривошипа.
υА=r·ω1=lОА·ω1=0,09·327,6= 29,5м/с
υА  О1А и направлена в сторону ω1
О1А и направлена в сторону ω1
 =
=  , пусть
, пусть  =90 мм.
=90 мм.
3. Масштаб плана скоростей.

4. Скорость точки В шатуна АВС
1) 
Скорость точки В находится графическим решением уравнений (построением треугольника скоростей) 
5. Скорость точки С шатуна АВС определим из подобия треугольников ∆АВС~ ∆авс
Скорость точки С  находим совместным графическим решением уравнений 2)
находим совместным графическим решением уравнений 2) 
6. Скорость точки F шатуна CF находим совместным графическим решением уравнений 3)
3) 
Полученные значения скоростей сводим в таблицу.
| Положение механизмов | Размер- ность | Скорости точек | |||
| υА | υВ | υС | υF | ||
| Мм | |||||
| м/с | 27,79 | 28,12 | 29,43 | 16,35 | |
| Мм | |||||
| м/с | 27,79 | 30,74 | 31,06 | 20,6 | |
| мм | |||||
| м/с | 27,79 | 20,27 | 31,06 | 29,43 | |
| Мм | |||||
| м/с | 27,79 | 12,42 | 29,1 | 30,74 |
2.3 Условные скорости звеньев механизма
Условные скорости звеньев определяем аналитически с использованием данных планов скоростей. Величины и направление условных скоростей звеньев сведены в таблицу.
| Положение механизма | ω1 | ω2 | ω4 | |||
| Величина 1/с | Направление | Величина 1/с | Направление | Величина 1/с | Направление | |
| 327,6 | 
| 78,8 | 
| 18,5 |
| |
| 327,6 |
| 79,9 |
| 15,5 |
| |
| 327,6 |
| 9,34 |
| 93,43 |
| |
| 327,6 |
| 16,6 |
| 83,04 |
|
2.4 Определение ускорений точек механизма двигателя.
1. Ускорение точки А
2. Масштаб плана ускорений

3. Ускорение точки В (4 положение)
1) 

 направлена по ВА от В к А.
направлена по ВА от В к А.
Значение  найдём графическим решением уравнения 1)
найдём графическим решением уравнения 1)

4. Ускорение точки С шатуна АВС
2) 
Где  направлена по СА от С к А
направлена по СА от С к А
∆АВС ~ ∆а’в’с’

 направлена по CВ от С к В
направлена по CВ от С к В


Величину ускорения точки С находим графически решением уравнения 2)
Положение точки С на плече ускорений можно также найти, построив ∆авс~∆ABC (т. С находится на пересечении лучей проведенных из точек а и в отрезка ав под углами β и γ)

5. Ускорение точки F шатуна CF
3) 
 направлена по FC от F к С
направлена по FC от F к С
Значение  найдем графическим решением уравнения 3)
найдем графическим решением уравнения 3)

Полученные значения уравнений сведём в таблицу 2.
Табл 2 – линейные ускорения.
| Положение механизма | Размер- ность | Ускорения точек | |||||||||
| WA | 
| 
| WB, WS3 | WC | 
| 
| Wf,WS5 | WS2 | WS4 | ||
| мм | 0.2 | ||||||||||
| м/с2 | |||||||||||
| мм | 0,5 | ||||||||||
| м/с2 | 58,8 |
2.5 Определение угловых ускорений звеньев механизма.
Угловые ускорения звеньев определяем аналитически с использованием плана ускорений.
e1=0, т.к. ω1=const

Величины и направления угловых ускорений звеньев сведены в таблицу.
| Положение механизма | E 1 | E 2 | E 4 | |||
| Величина | Направление | Величина | Направление | Величина | Направление | |
| - |
|
| ||||
| - |
|
|
3. Кинематическое исследование механизма ДВС
3.1 Определение избыточного давления Р газов на поршень.
Избыточное давление Pi=hi∙μp∙A, где
hi – ординаты индикаторной диаграммы, измеренные от линии атмосферного давления по кривой измерения давления в цилиндре.
μp – масштаб индикаторной диаграммы.
А – площадь поперечного сечения цилиндра. Находим величину ординат индикаторной диаграммы hi, соответствующие i-тому положению кривошипа ОА.
Величина избыточного давления.
| Положение механизма | Левый цилиндр | Правый цилиндр |
| Р=0 Н | Р= 20001 Н | |
| Р=42003 Н | Р=0 Н |
 м2
м2
3.2 Определение сил инерции звеньев.
Результирующая сила инерции звеньев 
Положение №4
Ри1=0
Ри2=m2∙μW(πs2’)=6∙107,32∙64=41210 H
Ри3=m3∙ μW(πв’)=9∙107,32∙39=37669 H
Ри4=m4∙ μW(πs4’)=3,5∙107,32∙78=29298 H
Ри5= m5∙ μW(πf’)=9∙107,32∙66=63748 H
Положение №8
Ри1=0
Ри2=m2∙ μW(πs2’)=6∙107,32∙44=28332 Н
Ри3=m3∙ μW(πв’)=9∙107,32∙13=13090 Н
Ри4=m4∙ μW(πs4’)=3,5∙107,32∙44=16527 Н
Ри5=m5∙ μW(πf’)=9∙107,32∙21=20283 Н
Результирующие сил инерции  проходит через полюсы инерции τ2 и τ4 шатунов, положение которых определяется отрезками.
проходит через полюсы инерции τ2 и τ4 шатунов, положение которых определяется отрезками.
3.3 Определение сил тяжести звеньев.
G1=0
G2=m2∙g=58,8 H
G3=m3∙g=88,2 H
G4=m4∙g=34,3 H
G5=m5∙g=88,2 H
3.4 Определение давления в кинематических парах.
3.4.1 Pассмотрение равновесия двухповодковой группы звеньев 4 и 5 (положение 4).
Действующие на группу силы:
Р5=42003 Н – давление газов на поршень F/
Gi – силы тяжести.
Pи – силы инерции.
 - давление направляющих на ползун F и давление шатуна 2 на шатун 4.
- давление направляющих на ползун F и давление шатуна 2 на шатун 4.
Условие равновесия группы 4, 5.

где G4=34,3 Ри5=63748
Ри4=29298 Р5=42003
G5=88,2 R05= 2125
R05 находится из уравнения моментов всех сил действующих на группу относительно точки С.
Положение №4.
ΣМF=0
3.4.2 Равновесие двухповодковой группы 2,3 (положение №4)
3.4.3 Равновесие кривошипа (положение №4)
3.4.5 Равновесие двухповодковой группы 2,3 (положение №8)
3.4.6 Равновесие кривошипа (положение №8)
3.4.7 Проверка (положение №8)
