Практическое занятие. (Основная часть РГР).
Тема: «Синтез ПИ регулятора для электропривода на базе электродвигателя постоянного тока с независимым возбуждением серии П.
План
1. Краткие теоретические сведения.
2. Задание на самостоятельную работу.
3. Методический пример.
4. Оформление результатов и критерии оценки выполнения задания.
Краткие теоретические сведения
Под синтезом ПИ регулятора, структурная схема которого изображена на рисунке 1, понимают расчёт параметров  и
и  его настройки, которые представляют собой коэффициенты усиления двух параллельных ветвей ПИ регулятора – соответственно пропорциональной и интегральной.
его настройки, которые представляют собой коэффициенты усиления двух параллельных ветвей ПИ регулятора – соответственно пропорциональной и интегральной.
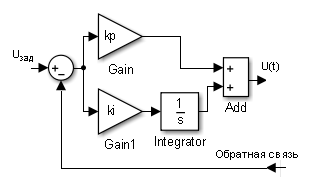
Рисунок 1. Структурная схема ПИ регулятора
Передаточная функция ПИ регулятора имеет вид
 .
.
Для расчёта искомых параметров и необходимо знать параметры всех передаточных функций, входящих в структурную схему электропривода на базе электродвигателя постоянного тока с независимым возбуждением (ДПТ с НВ), которая приведена на рисунке 2.

Рисунок 2. Структурная схема электропривода на базе ДПТ с НВ
В структурную схему, изображённую на рисунке 2, входят следующие передаточные функции.
Передаточные функции ДПТ с НВ по управлению и возмущению соответственно
 и
и  ,
,
где  – электромагнитная постоянная времени ДПТ [c];
– электромагнитная постоянная времени ДПТ [c];
 – электромеханическая постоянная времени ДПТ [c];
– электромеханическая постоянная времени ДПТ [c];
 – коэффициент передачи ДПТ по управлению [
– коэффициент передачи ДПТ по управлению [  ];
];
 – коэффициент передачи двигателя по возмущению [
– коэффициент передачи двигателя по возмущению [  ].
].
Передаточная функция тиристорного преобразователя
 ,
,
где  – постоянная времени тиристорного преобразователя;
– постоянная времени тиристорного преобразователя;
 – коэффициент усиления тиристорного преобразователя.
– коэффициент усиления тиристорного преобразователя.
Передаточная функция редуктора
 ,
,
где  – коэффициент передачи механического редуктора.
– коэффициент передачи механического редуктора.
Передаточная функция обратной связи
 ,
,
где  – коэффициент обратной связи [
– коэффициент обратной связи [  ].
].
Искомые параметры настройки и ПИ регулятора вычисляются по формулам
 и
и  . (1)
. (1)
Очевидно, что параметры настройки ПИ регулятора электропривода постоянного тока могут быть легко вычислены с помощью формул (1) без привлечения вычислительной техники. Однако, для определения показателей качества электропривода с вычисленными параметрами настройки регулятора требуется переходная характеристика, построение которой удобно выполнить в среде MATLAB при помощи программы Synt_PI_Regulator_DCM.m, листинг которой приведен в Приложении А.. Выполнение этой программы, которая рассчитывает параметры и , а также строит график переходной характеристики электропривода с регулятором, следует проводить в два этапа.
На этапе синтеза значение постоянной времени тиристорного преобразователя следует положить равным нулю:  . Это будет означать, что инерционность преобразователя при расчете параметров ПИ регулятора учитываться не будет. Найденные на этом этапе показатели качества следует сравнить с критериями качества, установленными для технического оптимума (оптимальными настройками):
. Это будет означать, что инерционность преобразователя при расчете параметров ПИ регулятора учитываться не будет. Найденные на этом этапе показатели качества следует сравнить с критериями качества, установленными для технического оптимума (оптимальными настройками):
 – время установления (Setting Time) [c];
– время установления (Setting Time) [c];
 – время нарастания (Rise Time) [c]; (2)
– время нарастания (Rise Time) [c]; (2)
 – перерегулирование (Overshoot) [%];
– перерегулирование (Overshoot) [%];
 – статическая ошибка.
– статическая ошибка.
На этапе заключительного моделирования при построении переходной характеристики постоянную времени тиристорного преобразователя следует учесть, положив  с. Это можно сделать, убрав знак % в командной строке программы синтеза Synt_PI_Regulator_DCM.m
с. Это можно сделать, убрав знак % в командной строке программы синтеза Synt_PI_Regulator_DCM.m
% Ttp = 0.002
Таким образом, в результате синтеза требуется рассчитать параметры настройки ПИ регулятора и , а также построить два графика с переходными характеристиками. Первый, построенный при  , а второй – при с. В заключение следует определить показатели качества по двум графикам и сделать вывод о соответствии рассчитанных параметров настройки и оптимальным.
, а второй – при с. В заключение следует определить показатели качества по двум графикам и сделать вывод о соответствии рассчитанных параметров настройки и оптимальным.