2.1. Для выбранного в соответствии с вариантом задания на РГР типа электродвигателя определить параметры его передаточных функций.
2.2. Определить параметры остальных (кроме регулятора) передаточных функций, входящих в структуру электропривода, изображённую на рисунке 2.
2.3. Рассчитать параметры настройки регулятора и, учитывая найденные  и
и  , построить переходную характеристику электропривода при
, построить переходную характеристику электропривода при  , с помощью которой определить показатели качества, сравнить их с оптимальными значениями (2) и сделать вывод.
, с помощью которой определить показатели качества, сравнить их с оптимальными значениями (2) и сделать вывод.
2.4. Построить переходную характеристику электропривода по управляющему воздействию при  , с помощью которой определить показатели качества, сравнить их с полученными результатами в п. 2.3 и оптимальными значениями (2). Сделать вывод о влиянии постоянной времени
, с помощью которой определить показатели качества, сравнить их с полученными результатами в п. 2.3 и оптимальными значениями (2). Сделать вывод о влиянии постоянной времени  тиристорного преобразователя на результаты синтеза.
тиристорного преобразователя на результаты синтеза.
2.5. Используя структурную схему, изображённую на рисунке 2, параметры передаточных функций, а также параметры настройки ПИ регулятора, построить средствами Simulink переходный процесс для электропривода как реакцию на управляющее  и возмущающее
и возмущающее  воздействия, выполнив необходимые настройки блоков Step, обеспечивающих последовательное во времени наблюде
воздействия, выполнив необходимые настройки блоков Step, обеспечивающих последовательное во времени наблюде
Срок исполнения задания: 14.04.2020. Студенты, сдавшие отчёты в указанный срок, получают зачёт за РГР и накопительные баллы в зачёт экзамена.
3. Методический пример синтеза ПИ регулятора при помощи системы MATLAB
Для расчёта искомых параметров настройки ПИ регулятора и построения переходной характеристики САУ электроприводом необходимо с помощью редактора Edit системы MATLAB создать m -файл, в который следует поместить (можно при помощи операции копирования) приведенный в Приложении А скрипт программы синтеза Synt_PI_Regulator_DCM.m.
В качестве исходных данных следует принять значения параметров передаточных функций ДПТ с НВ, соответствующих справочным данным конкретного электродвигателя постоянного тока серии П, указанного в вариантах индивидуального задания, номер которого определяет преподаватель.
Справочные данные для электродвигателей серии П приведены в таблице Б1 Приложения Б, где так же указаны значения коэффициента передачи механического редуктора.
Параметры передаточной функции тиристорного преобразователя  и обратной связи
и обратной связи  следует принять следующими:
следует принять следующими:
 = 0,002 с;
= 0,002 с;  = 15;
= 15;  = 1.
= 1.
Результаты работы программы Synt_PI_Regulator_DCM.m приведены на рисунках 3 и 4. Показатели качества при помощи контекстного меню выведены на поле графиков.


Рисунок 3. Переходная характеристика при  =0с Рисунок 4. Переходная характеристика при =0,002с
=0с Рисунок 4. Переходная характеристика при =0,002с
Результаты моделирования в среде Simulink приведены на рисунке 5.
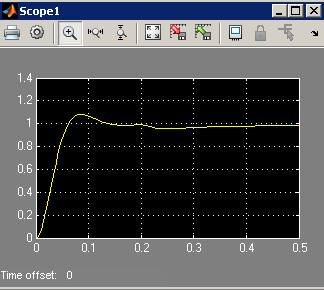
Рисунок 5. Реакция электропривода на управляющее (задающее) и возмущающее (момент нагрузки) воздействия
На графике, изображённом на рисунке 5, видно, что управляющее (задающее) воздействие приложено в момент времени t=0, а возмущающее – момент нагрузки M(t) приложено в момент времени t=0,2c. При этом видно, что приложенный момент нагрузки уменьшил скорость вращения исполнительного электродвигателя. Однако, через 0,2с система автоматического управления электроприводом восстановила прежнюю скорость.
Анализ результатов моделирования следует выполнить самостоятельно на основе сравнения показателей качества, полученных в экспериментах при различных значениях постоянной времени тиристорного преобразователя.
Для вычисления параметров передаточных функций ДПТ с НВ серии П можно воспользоваться программой TF_DCM_parameters, текст (скрипт) которой приведен в Приложении В. При этом в текст программы следует внести на соответствующих позициях вместо данных примера справочные данные по электродвигателю, указанному в варианте задания на РГР.