Оборудование:lego mindstorms EV3 45544 базовый набор (один набор на 2 человек), проектор и компьютеры.
Примерно 70% земной поверхности недоступны для транспортных средств, созданных руками человека, хотя во многие недоступные места можно добраться верхом на лошади. Проблема здесь заключается в характере точки опоры.
Задача шагающих машин важна и актуальна, особенно как средство решения проблемы передвижения по бездорожью (или по местности со сложным рельефом).
Объясняется это следующими обстоятельствами.
Колесо лишь частично решает проблему передвижения, т.к. для его эффективного использования нужна гладкая опорная поверхность, притом непрерывная. При перекатывании же колеса по мягкой дороге деформируется грунт. На это также затрачивается большая энергия.
Гусеничный ход. Его лента имеет шарниры, соединенные пальцами. Когда она ложится на твердое препятствие, катки, проходящие через поднятые звенья, также поднимаются, частично сжимая пружины кареток; происходит подъем центра тяжести аппарата, на что затрачивается дополнительная мощность. Значительная потеря энергии вызвана и трением в открытых шарнирах, которые имеют повышенный износ.
Шагающее устройство представляет собой «лыжу», которая может иметь обрезиненную нижнюю поверхность. Когда такая пыжа становится на неровный грунт, она опирается только на вершины выступов. Все выступы и углубления лыжей не копируются. Следовательно, центр тяжести аппарата от неровностей почвы в пределах длины лыжи не колеблется.
Центр тяжести механической системы называется точка, относительно которой суммарный момент сил тяжести (действующих на систему) равен нулю.
Центр масс (в механике)- геометрическая точка, характеризующая движение тела или системы частиц как целого.
Для создания двуногого робота каждая его нога должна иметь широкое основание, чтобы робот смог стоять на одной ноге, пока вторая поднимается.
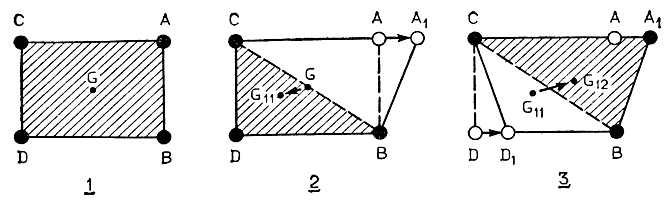
Для создания четырёхногого робота также пригодится основание под каждую ногу, при этом 2 ноги, расположенные по диагонали по отношению друг к другу, должны стоять, а две другие подниматься. Центр тяжести должен проходить ровно посередине между передними и задними ногами, иначе робот может завалиться.
При движении четырехногого робота – совместно с перемещением ноги, идет смещения центра тяжести в треугольник образованный тремя оставшимися ногами. Так поочередности перемещаются все ноги.
На картинке представлено перемещение ноги из точки А в точку А1, затем другой ноги из точки D в точку D1. С остальными ногами действия будут аналогичны.
Буквой G обозначен центр тяжести робота и его смещение при шаге.
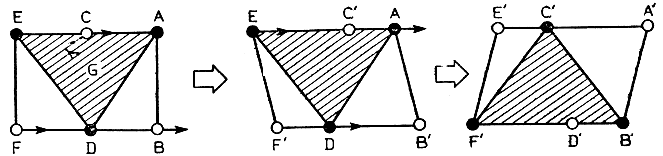
Для создания шестиногого робота столь широкое основание не приходится, т.к. трёх ножек будет достаточно для прочной опоры. Во время ходьбы 3 ножки, расположенные по диагонали по отношению друг к другу, должны стоять, а остальные подниматься. Как правило, это 2 крайние ножки с одной стороны, и одна центральная, с другой стороны.
Видео 1:
https://yandex.ru/video/preview?text=%D1%88%D0%B0%D0%B3%D0%B0%D1%8E%D1%89%D0%B8%D0%B5%20%D0%BC%D0%B5%D1%85%D0%B0%D0%BD%D0%B8%D0%B7%D0%BC%D1%8B%20%D0%B8%D0%B7%20%D0%BB%D0%B5%D0%B3%D0%BE%20ev3&path=wizard&parent-reqid=1605621651518277-974901373789046937700275-production-app-host-sas-web-yp-129&wiz_type=v4thumbs&filmId=1102252935546075432
Видео 2:
https://yandex.ru/video/preview?text=%D1%88%D0%B0%D0%B3%D0%B0%D1%8E%D1%89%D0%B8%D0%B5%20%D0%BC%D0%B5%D1%85%D0%B0%D0%BD%D0%B8%D0%B7%D0%BC%D1%8B%20%D0%B8%D0%B7%20%D0%BB%D0%B5%D0%B3%D0%BE%20ev3&path=wizard&parent-reqid=1605621651518277-974901373789046937700275-production-app-host-sas-web-yp-129&wiz_type=v4thumbs&filmId=6083665537300629532