Наиболее распространенными транспортными средствами в трубных цехах является рольганги. В зависимости от потребностей производственного процесса трубные заготовки и трубы движутся в свободном или фиксированном положении с помощью передвижных рольгангов, тележек, толкателей. Эти транспортные устройства является неотъемлемой частью производства, складов в цехах. Рольганги в большинстве случаев работают в перемежающемуся режиме, с жесткими программами в составе автоматизированных технологических узлов. В цехах изготовления труб большого диаметра рольганги передают трубные заготовки или трубы с одного производственного участка на другой. Сейчас большой интерес приобретает распространение процессов с регулировкой скорости транспортировки. Необходимо регулирование скорости обеспечивается благодаря пидмиканню двигателей к сетям с пониженной регулируемой частотой или к статическим преобразователей. Транспортные средства исполняются в виде самоходных рельсовых машин мостового типа. Фрикционная сцепления роликов с трубой обеспечивает движение [1].
Характерным для передвижного рольганга является наличие багатотролейного токоподвода. Надежность работы электрооборудования повышает посредством передачи ряда сигналов, осуществляемых по двум параллельно включенным троллеях, токосъемники выполняются спаренными. Передвижной рольганг № 14 представляет собой самоходную тележку, движущегося перпендикулярно основного технологического потока, с установленными на нем 4-мя приводными роликами, на которых располагаются трубы, заготовки и другие. На приводные ролики передвижного рольганга, что остановился в заданной позиции, со стационарного рольганга технологического участка передается трубная заготовка. Рольганг передвигается к позиции, где изделие из приводных роликов выдается на стационарный рольганг следующей участка.
На рисунке 1.1 изображена кинематическая схема передвижного рольганга. На платформе расположены приводные ролики 4, с помощью которых перемещаются трубные заготовки. Колеса 3 напрессованы на трансмиссионные валы. Один из которых приводятся в движение ЭД 2. Редуктор 6 обеспечивает механическую изменение скорости и механическое соединение. Электромеханические тормоза 1 обеспечивает точность остановки рольганга [1].
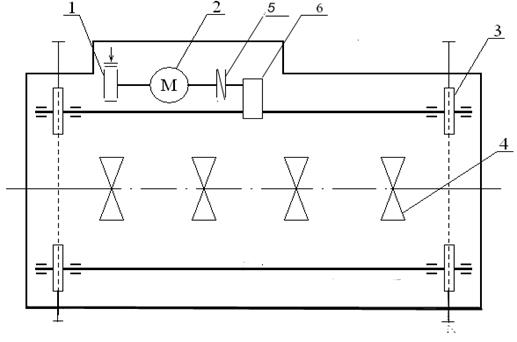
Рисунок 1.1- Кинематическая схема передвижного рольганга № 14:
1 - тормоза; 2 - электродвигатель; 3 - ходовые колеса; 4 - приводные ролики; 5 - соединительные муфта; 6 - редуктор.
Приложение Н
Пример оформления заключения
ЗАКЛЮЧЕНИЕ
Курсовой проект выполнен в полном объёме в соответствии с заданием на курсовое проектирование.
Цель и задачи, поставленные в работе выполнены. В частности произведен расчет, выбор и проверка оборудования понизительной подстанции для обеспечения электроснабжения микрорайона.
Тема курсовой работы является актуальной для электрообеспечения городов, тесно связана с вопросами эксплуатации электроэнергетической системы города и отвечает требованиям по энергосбережению в электроэнергетике.
Курсовой проект состоит из трех частей. В первой (общей) части курсового проекта рассмотрены электроприемники микрорайона, которые относятся к третей категории по надежности электроснабжения. Рассмотрена краткая характеристика источника питания.
В результате разработки расчетной части курсового проекта определены электрические нагрузки для жилого микрорайона. Установлено, что для электрообеспечения микрорайона, с соответствующим количеством общественных коммунальных учреждений необходима ТП в которой установлено два трансформатора типа ТС мощностью по 100 кВА каждый.
Произведён расчёт и определены сечения и марки кабелей 6 кВ, подходящих к ТП-6/0,4 и сечение проводов ВЛ-0,4 кВ. Выполнен расчёт токов короткого замыкания согласно заданию, выбраны и проверены коммутационные и защитные аппараты для питающих сетей. Предусмотрена релейная защита трансформаторов и линии 6 кВ.
На основе произведенных расчетов можно сделать вывод, что выбран наиболее оптимальный и рациональный вариант электроснабжения микрорайона №5 г.Харцызска.
Приложение П
Пример оформления списка использованных источников
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ:
1. Москаленко В.В. Электрический привод. - М.: Мастерство, 2000. – 320 с.;
2. Рапутов Б.М. Электрооборудование кранов металлургических предприятий. - М.: Металлургия, 1990. – 194 с.;
3. Справочник по автоматизированному электроприводу. Под ред. Елисеева В.А. и Шинянского А.В. - М.: Энергоатомиздат, 2001. – 300 с.;
4. Федосеев В.Н. Безопасность труда машиниста мостового крана. - М.: Машиностроение, 2003. – 182 с.;
5. Яуре А.Г., Певзнер Е.М. Крановый электропривод. Справочник. - М.: Энергоатомиздат, 2008. – 215 с.
Приложение Р
Пример оформления графиков
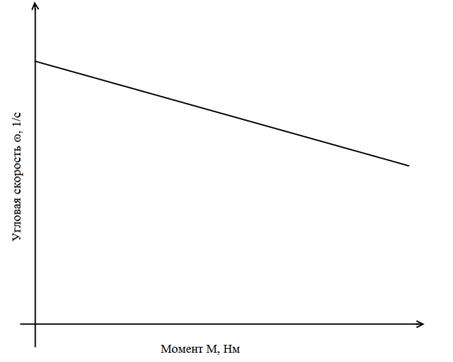
Рисунок 3.1 - Механическая характеристика ДПТ
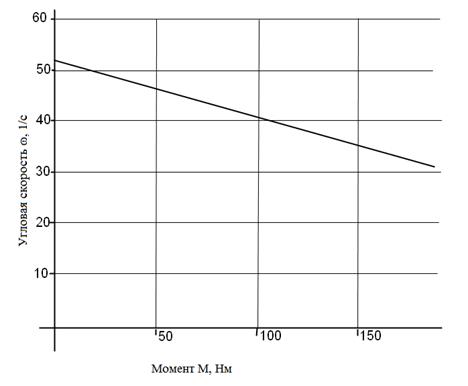
Рисунок 3.2 - Механическая характеристика Д-32
Приложение С
Пример оформления спецификации
| Форм. | Зона | Обоз. | Обозначение | Название | Колич. | Прим | |||||||||||
| Из | Лист | № докум | Подп | Дата | |||||||||||||
| Разроб. | Литер | Лист | Листов | ||||||||||||||
| Проверил | у | ||||||||||||||||
| Н.контр. | |||||||||||||||||
| Утверд. | |||||||||||||||||