Помимо управляемости и устойчивости важным свойством, характеризующим качество транспортного процесса, является его сходимость к решению поставленной задачи.
Ранее уже были рассмотрены примеры неустойчивых транспортных процессов. Понятно, что в каждом из этих случаев система не обеспечивала достижение тех целей, которые были перед ней поставлены. Однако, в ряде ситуаций процесс в системе может быть устойчивым, может существовать заключительная дислокация, хотя при этом не будет обеспечена сходимость к решению задачи.
Поясним это свойство на простом примере. Пусть рассматривается перемещение объекта Vот зоны SLк зоне SRпо сети, представленной на рис. 3.3.1.
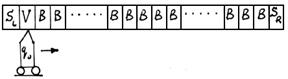
Рис.3.3.1
Требуемый транспортный процесс может быть осуществлен под управлением оператора (3.3.1).

 (3.3.1)
(3.3.1)
Если начальная дислокация α0 соответствует состоянию, изображенному на рис.3.3.1, то последовательность дислокации будет такой, как это показано в (3.3.2)
 (3.3.2)
(3.3.2)
В этой последовательности дислокация αm+1 является заключительной
αm+1= αр ,
и, следовательно, процесс перемещения объекта V, организуемого оператором (3.2.1) является, по крайней мере, частично управляемым. Этот процесс устойчив по исходным данным. Однако, он может иначе реагировать на возмущение переменных. Действительно, пусть в какой-то момент времени сработало возмущающее воздействие, приведшее к тому, что дорогу завалило (препятствие N) так, как показано на рис.3.3.2.
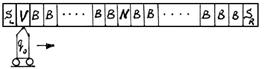
Рис.3.3.2
В таком случае процесс, организуемый оператором (3.3.1), приводит к последовательности дислокаций (3.3.3)
(3.3.3)
В последовательности дислокаций (3.3.3) αк является заключительной
αр = αк ,
поскольку в операторе (3.3.1) нет операций с начальной тройкой

Таким образом, в этом процессе имеется установившееся состояние, но не достигается цель самого процесса. Причина отсутствия сходимости данного процесса к решению задачи заключается не только в примитивности логики оператора (3.3.1). В него можно было бы добавить операции, позволяющие менять направление движения на обратное
 (3.3.4)
(3.3.4)
или осуществляющие поиск пути обхода препятствия N
 (3.3.5)
(3.3.5)
но эти операции для сети, представленной на рис.3.3.2 ничего не дают, так как в ней имеется единственный маршрут движения от SL до SR. В силу этого обстоятельства причинами отсутствия сходимости являются как недостаточная гибкость логики оператора (3.3.1), так и недостаточное развитие топологии сети.
Для практического подтверждения этого соображения рассмотрим следующий пример. Пусть в сети рис.3.3.3 возникает такое же возмущающее воздействие, как и в сети рис.3.3.2.
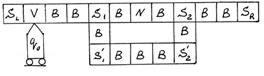
Рис.3.3.3
Процесс в сети рис.3.3.3 осуществляется под управлением оператора (3.3.6).
(3.3.6)
В описании некоторых операций этого оператора содержится символ «∞», обозначающий край дороги и требующий изменения направления движения.
С этим оператором процесс в сети рис.3.3.3 будет складываться следующим образом (3.3.7)
(3.3.7)
(3.3.7)

(3.3.7)
В данном процессе заключительной дислокацией является дислокация α21
α21= αр.
Процесс управляем, устойчив и сходится к решению поставленной задачи. Для этого потребовалось развить логику управляющего оператора и топологию используемой сети. Однако, такие действия возможны только тогда, когда речь идет о развитии сети и оператора. Если же используется имеющаяся сеть и оператор, необходимо осуществлять анализ того, как можно приблизиться к приемлемому установившемуся состоянию.
В связи с этим очень важным оказывается рассмотрение свойства системы стремиться к тому положению или состоянию, которое может рассматриваться как допустимый результат процесса.
Оператор может быть сформирован таким образом, что он может обеспечивать достижение не одного единственного установившегося состояния. Понятно, что желательно достижение лучшего, в каком-то смысле, установившегося состояния, которое, однако, может потребовать затрат дополнительного времени или каких-то других ресурсов: энергии, финансов и так далее.
Результат транспортного процесса может характеризоваться, например, следующими параметрами: W – объем выполненной работы, Е – энергетические расходы и Т – время процесса:
Rez = <W, E, T>(3.3.8)
При условии введения соответствующей метрики можно было бы количественно оценить сходимость рабочего процесса к допустимому результату. В таком случае становится существенным вопрос определения того, какой результат может быть принят как допустимый.
Понятно, что для решения этой проблемы могут быть выбраны различные подходы. Один из возможных состоит в том, что моделируется рабочий процесс в условиях прогнозируемых исходных и промежуточных данных. На основе этого моделирования получается эталонная оценка того, каким может быть прогнозируемый результат
Rezid = <W', E', T'>(3.3.9)
После этого рассматривается поведение системы при разумных, но случайных возмущениях исходных и промежуточных данных, причем в условиях применения оператором разных вариантов возможных операций.
Если при этом достигается установившееся состояние с результатом
Rezre = <W", E", T">(3.3.10)
и при этом
ρ(Rezid, Rezre)≤δ, (3.3.11)
то транспортный процесс называется сходящимся с допустимым качеством δ.
Этот процесс может носить пошаговый характер, если оператор имеет возможность выбора вариантов на основе имеющихся в его составе операций.
Сходимость транспортного процесса с заданным качеством δ зависит от совокупности факторов: алгоритмической гибкости оператора, развитости сети, ограниченности ресурсов (времени, энергии) и некоторых других.
Опираясь на содержательный смысл понятия сходящегося рабочего процесса, целесообразно ввести определение монотонно сходящегося процесса.
Транспортный процесс назовем монотонно сходящимся, если на каждом шаге времени tk промежуточный результат Rkezre не отдаляется от допустимого результата.
Это означает, что если рассматривается монотонно сходящийся транспортный процесс, то соответственно его последовательности дислокаций
α0(х0), α1(х1),…, αк(xк),…, αp(x'p) (3.3.12)
может быть сопоставлена последовательность
ρ0, ρ1,… ρк, …..ρр; (3.3.13)
где каждое
ρк(Rkezre, Rezid)=δk,(3.3.14)
причем
ρ0=δ0≥ ρ1=δ1≥… ≥ ρк=δк≥… ≥ ρр=δр=δ,(3.3.15)
где δ – допустимое качество реализации транспортного процесса.
Исполнение процесса согласно заданной программе в тех случаях, когда из-за каких-либо возмущений не возникает никаких отклонений от заданных в ней позиций, является примером монотонно сходящегося процесса, причем с допустимым качеством реализации.
Следует отметить, что допустимое качество реализации процесса δопределяется многими факторами: отработанностью системы управления; структурой сети, сложностью технологии, обеспеченностью ресурсами и некоторыми другими. Чем хуже сеть, тем хуже качество δ и монотонность может вообще не обеспечиваться.
Понятие устойчивости и сходимости транспортных процессов понятным образом связаны между собой. Если процесс оказывается в системе неустойчивым по исходным и промежуточным данным, то не обеспечивается, очевидно, и сходимость. В процессах (3.2.18) и (3.2.19) нет возможности ожидать их сходимости к решению поставленной задачи.
Однако, устойчивость не является условием достаточным для обеспечения сходимости. В процессе может формироваться установившееся состояние, но при этом он не будет сходиться к результату с допустимым качеством.
Процессы (3.3.2), (3.3.3) и (3.3.7) имеют установившиеся состояния, но качество этих состояний и результаты принципиально отличны друг от друга.
В процессе (3.3.3) имеет место заключительная дислокация (объект V останавливается перед препятствием N), но в нем нет возможности достичь поставленную цель.
Процесс (3.3.2) обеспечивает достижение цели в заключительной дислокации. Более того, этот процесс – монотонносходящийся к цели. Однако, он не обеспечивает защиты этой сходимости к цели при возмущающих воздействиях. Появление в этой сети препятствия N трансформирует процесс (3.3.2) в (3.3.3), вследствие чего теряется свойство сходимости.
Процесс (3.3.7) обладает установившимся состоянием, он обеспечивает сходимость к решению задачи. Однако этот процесс не является монотонно сходящимся. Зато этот процесс, вследствие более развитой топологии сети, обладает возможностью сохранять сходимость и тогда,когда действуют возмущающие воздействия типа завала N.
Рассмотренные понятия устойчивости и сходимости транспортных процессов порождают основания для постановки и изучения методов решения двух важных задач: во-первых, анализа системы, структуры ее сети, возможностей оператора и некоторых других элементов управления с точки зрения обеспечения сходимости процесса; во-вторых, изучения методов оптимизации логики управления и структуры сети с целью повышения качества услуги или минимизации затрат Е, Т и некоторых других.
В качестве иллюстрации того, как может меняться качество процесса, рассмотрим еще один пример. Пусть задана транспортная сеть, подобная той, которая приведена на рис.3.2.2, но в отличие от последней содержащая дополнительный элемент Н2 около узла S2 (рис.3.3.4).
Рис.3.3.4
Целью транспортного процесса в данной системе является доставка объекта V1 от S0 к S3 по маршруту <S0, S1, S'1, S'2, S3, S'3> с использованием нижней части петли от S1 к S2, а также доставки объекта V2 от S3 к S0 по маршруту <S3, S2, S"2, S''1, S1, S0>, с использованием верхней части петли от S2 к S1.
Пусть управляет транспортным процессом оператор (3.3.17), который подобен (3.2.14), но в отличие от него содержит операции
 (3.3.16)
(3.3.16)
Оператор (3.3.17) содержит в себе следующие операции:
(3.3.17)

Введение операций (3.3.16) развивает логику управления, осуществляемую оператором (3.3.17), позволяя (в зависимости от состояния Н2) использовать еще один путь для перемещения объекта V1 от S1 к S3. Понятно, что эта более гибкая логика оказалась возможной в результате развития транспортной сети. Тогда, когда объект V1 начинает двигаться в обратную сторону после встречи с V2 у зоны S2,то поравнявшись с зоной. Содержащей Н2, он может выбрать два направления действий: либо продолжить возврат через S'2, если Н2 закрыт (Н2), либо начинать двигаться через Н2 к S3, если Н2 открыт.
Как в таком случае складывается транспортный процесс, можно увидеть из последовательности дислокаций (3.3.18):
(3.3.18)

(3.3.18)
(3.3.18)
(3.3.18)
Как видно из последовательности (3.3.18), дислокация α55 является заключительной
α55= αр
Из этого следует, что транспортный процесс после нескольких циклов все же сошелся, причем он сходится к требуемому решению задачи. На такой исход повлияло то, что на 40-м шаге (дислокация α40) Н2 пропустил объект V1 в прямом направлении по дополнительному пути к S3. В результате появившейся возможности процесс сошелся к решению задачи.
Проведенный анализ показывает, что при неустойчивом процессе сходимость не наступает. Однако если организовать устойчивый транспортный процесс, то сходимость может быть обеспечена при соблюдении определенных условий. В последнем рассмотренном примере процесс мог бы быть неустойчивым. Однако, благодаря тому, что система на рис.3.3.4 приобрела дополнительные возможности за счет развития сетевой структуры, а оператор (3.3.17) стал обладать более гибкой логикой управления при введении в его состав операций (3.3.16), появилась возможность вывести систему из состояния неустойчивого процесса и обеспечить сходимость к решению задачи. В рассмотренном процессе этот выход из неустойчивости был осуществлен «как бы случайно». На самом же деле проведение таких экспериментов необходимо для того, чтобы на основании такого опыта выстраивать логику управления процессами и добиваться требуемых характеристик не случайно, а детерминированно.