1. Технологический процесс сборки 组装的工艺过程
2. Сборочная операция 装配操作
3. Разъемные /неразъемные соединения 可拆卸/不可拆卸的连接
4. подвижные / неподвижные соединения 运动的/静止的连接
5. соединение 连接
- плоское 平的
- цилиндрическое 圆柱形的,筒式的
- коническое 圆锥的;锥形的
- сферическое 球的,球面的,球形的
- винтовое 螺旋的,螺钉的,螺旋桨的
- профильное 剖面的
6. соединение
- резьбовое 螺纹的
- клиновое 楔形的
- штифтовое 柱销形的
- шпоночное单键的
- шлицевое 开缝的
- сварное 焊(或熔)接上的,焊制的
- паяное 焊过
- клепаное 铆接的
- клееное, 漆布的,胶布的,油布的
- фланцевое 凸缘的;法兰盘的
- ниппельное 螺纹接头的,螺纹接管的
- штуцерное 接头
- прессовое 压力的
- фальцованное 折叠的
- развальцованное 扩口的
- комбинированное 配合的,复合的,组合的
7. Узел 接头;节点
8. Агрегат 部件
9. Сборка агрегатная 部件的组装
10. Предварительная сборка 初步的组装
11. Промежуточная сборка 中间(阶段)的组装
12. Сборка под сварку 用焊接组装
13. Окончательная сборка 最终(阶段)组装
14. Сборка
- ручная 手工制造的
- механизированная 机械化的
- автоматизированная 自动化的
- автоматическая 自动的
15. Сборка
- поточная 流水作业的,连续的
|
|
- непоточная 不连续的
16. Сборка
- стационарная 固定的,非流动的
- подвижная 巡回的,流动的;机动的
16. Непоточная стационарная сборка 不连续的固定式组装
17. Непоточная подвижная сборка 不连续的流动式组装
18. Поточная стационарная сборка 连续的固定式组装
19. Поточная подвижная сборка 连续的流动式组装
20. Продольно-прессовые соединения 轴向压力连接
21. Поперечно-прессовые соединения 横向压力连接
Терминологический словарь. Теория машин и механизмов
| А | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Анализ механизма–исследование структурных, кинематических и динамических свойств механизма по заданной схеме. | analysis of mechanism | ||||||||||||||||||||||||||||||||||||||||||||||||||
| анализ механизма динамический – определение движения звеньев под действием приложенных к ним сил или определение сил по заданному закону движения. | dynamic analysis | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Анализ механизма кинематический–определение параметров движения звеньев (траекторий, скоростей и ускорений характерных точек; угловых положений, скоростей и ускорений всех звеньев) механизма по заданному движению начальных звеньев. | kinematic analysis | ||||||||||||||||||||||||||||||||||||||||||||||||||
| анализ механизма силовой– определение действующих в механизме сил по заданному движению. Обычно следует определить реакции в кинематических парах и уравновешивающие силы, приложенные к начальному звену. Силовой анализ ведут в следующей последовательности. Предварительно раскладывают механизм на структурные группы, которые должны удовлетворять условию кинетостатической определимости: число уравнений кинетостатики должно быть равно числу неизвестных величин, характеризующих реакции в кинематических парах. | force analysis of mechanism | ||||||||||||||||||||||||||||||||||||||||||||||||||
Аналог скорости (точки) – первая производная радиус-вектора точки по обобщенной координате механизма. При вращающемся начальном звене за обобщенную координату удобно принять угол поворота ведущего звена φ1:
 ,
при прямолинейно-поступательном движении точки i, радиус-вектор ,
при прямолинейно-поступательном движении точки i, радиус-вектор  можно выбрать так, что его величина окажется равной перемещению можно выбрать так, что его величина окажется равной перемещению  , тогда , тогда
 ,
здесь ,
здесь  – скорость точки i, ω1 – угловая скорость начального звена. – скорость точки i, ω1 – угловая скорость начального звена.
| analog of the velocity of a point | ||||||||||||||||||||||||||||||||||||||||||||||||||
Аналог углового ускорения звена– вторая производная угла поворота φ i звена по обобщенной координате механизма, например, по φ1:  Угловое ускорение ε i при известных аналогах скорости и ускорения определяется Угловое ускорение ε i при известных аналогах скорости и ускорения определяется
 ,
где ω1, ε1 – соответственно угловая скорость и угловое ускорение начального звена. ,
где ω1, ε1 – соответственно угловая скорость и угловое ускорение начального звена.
| analog of the angular acceleration of a link | ||||||||||||||||||||||||||||||||||||||||||||||||||
Аналог угловой скорости звена– первая производная от угла поворота φ i звена по обобщенной координате механизма. При вращающемся начальном звене за обобщенную координату удобно принять угол поворота ведущего звена φ1:
 . .
| analog of the angular velocity of a link | ||||||||||||||||||||||||||||||||||||||||||||||||||
Аналог ускорения точки– вторая производная радиус-вектора точки по обобщенной координате механизма s1 или φ1
 ,
где s ″, s ′ – аналоги ускорения и скорости соответственно; ω1, ε1 – соответственно угловая скорость и угловое ускорение начального звена. ,
где s ″, s ′ – аналоги ускорения и скорости соответственно; ω1, ε1 – соответственно угловая скорость и угловое ускорение начального звена.
| analog of the acceleration of a point | ||||||||||||||||||||||||||||||||||||||||||||||||||
| В | |||||||||||||||||||||||||||||||||||||||||||||||||||
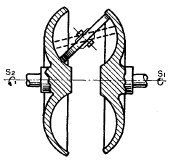 Вариатор – механизм для бесступенчатого регулирования передаточного отношения. Обычно в качестве вариаторов используют фрикционный механизм, в котором в процессе регулирования изменяют радиусы взаимодействующих поверхностей. На схеме представлены конусный (а) и торовый (б) вариаторы.
| variable speed drive, variator | ||||||||||||||||||||||||||||||||||||||||||||||||||
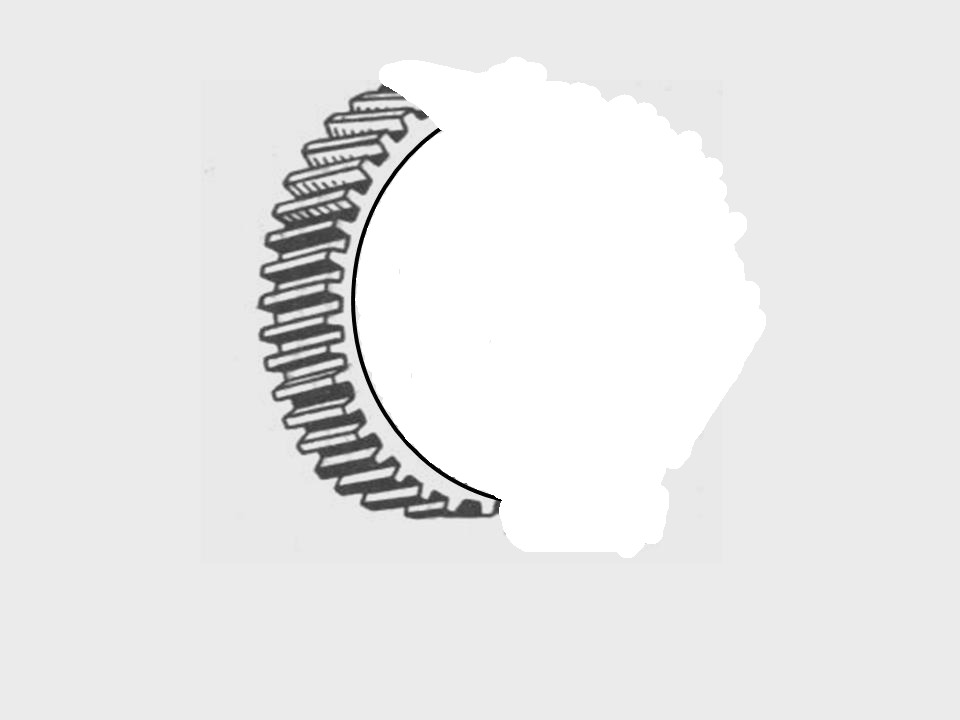 Венец зубчатый– часть зубчатого колеса, содержащая все зубья, связанные друг с другом прилегающей к ним поверхностью тела колеса. Венец зубчатый– часть зубчатого колеса, содержащая все зубья, связанные друг с другом прилегающей к ним поверхностью тела колеса.
| rim, gear(ed) rim, tooth(ed) rim, gear(ed) ring, tooth(ed) ring | ||||||||||||||||||||||||||||||||||||||||||||||||||
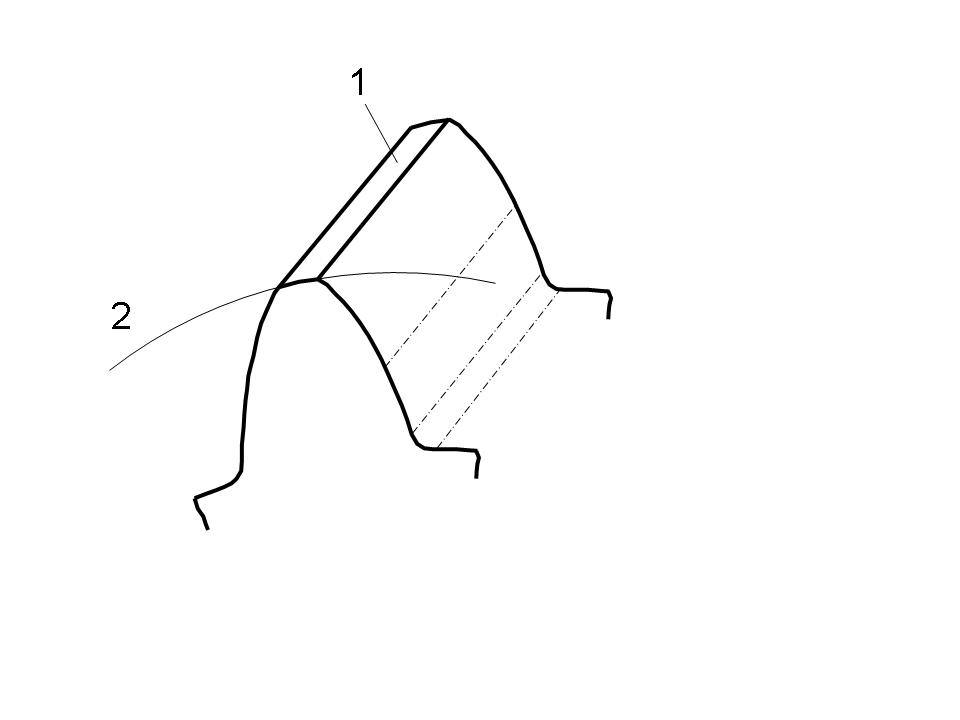 Вершина зуба–поверхность 1, ограничивающая зуб сверху. 2 – окружность вершин зубьев (см. также Окружность вершин зубьев). Вершина зуба–поверхность 1, ограничивающая зуб сверху. 2 – окружность вершин зубьев (см. также Окружность вершин зубьев).
| top land, tip of tooth, tooth tip | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Вибрация–механические колебания. | vibration | ||||||||||||||||||||||||||||||||||||||||||||||||||
| holder, planet arm, planet carrier | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Впадина (между зубьями)– пространство между двумя боковыми поверхностями зубьев, ограниченное поверхностью вершин. | tooth space | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Выбег машины– период остановки – неустановившееся движение (по инерции) после выключения двигателя за счет кинетической энергии движущихся частей. | rundown, running-down, runout | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Выстой– длительная остановка выходного звена при непрерывном движении входного звена. | dwell | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Выстой в кулачковом механизме верхний –длительная остановка выходного звена в наиболее удаленном положении по отношению к центру вращения кулачка при непрерывном вращении кулачка. | top dwell | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Г | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Генератор– машина, предназначенная для преобразования механической энергии в энергию любого вида (электрическую…). | generator | ||||||||||||||||||||||||||||||||||||||||||||||||||
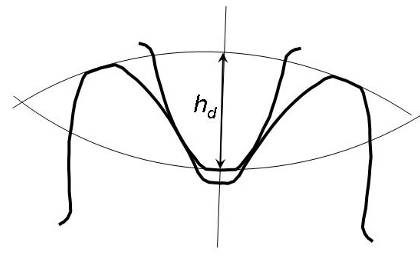 Глубина захода зубьев– длина отрезка межосевой линии цилиндрической зубчатой передачи, заключенного между окружностями вершин зубьев шестерни и колеса. Глубину захода зубьев обозначают hd. Глубина захода зубьев– длина отрезка межосевой линии цилиндрической зубчатой передачи, заключенного между окружностями вершин зубьев шестерни и колеса. Глубину захода зубьев обозначают hd.
| working depth | ||||||||||||||||||||||||||||||||||||||||||||||||||
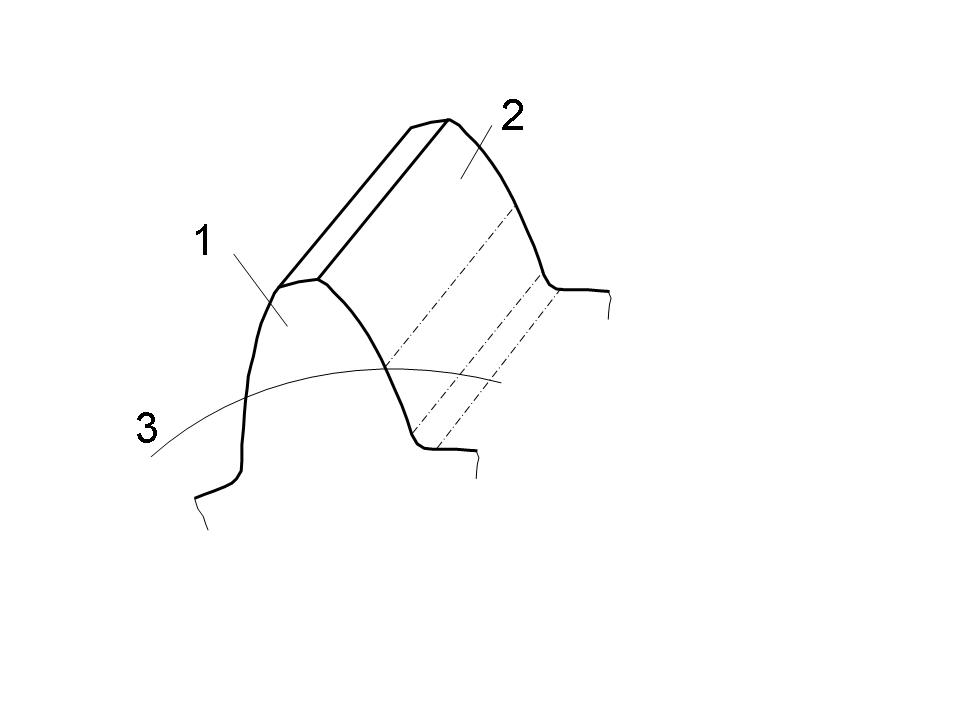 Головка зуба– часть 1 зуба, расположенная выше делительной окружности 3; 2 – рабочая поверхность головки зуба, (см. также поверхность головки зуба рабочая). Головка зуба– часть 1 зуба, расположенная выше делительной окружности 3; 2 – рабочая поверхность головки зуба, (см. также поверхность головки зуба рабочая).
| addendum | ||||||||||||||||||||||||||||||||||||||||||||||||||
| головка зуба делительная – см. Головка зуба. | |||||||||||||||||||||||||||||||||||||||||||||||||||
Группа структурная (группа Ассура)– кинематическая цепь с нулевой степенью свободы, не распадающаяся на более простые цепи, обладающие также нулевой степенью свободы. Для плоских механизмов условие записывается в виде  , где n – количество подвижных звеньев, р 5, р 4 - количество кинематических пар 5-го и 4-го класса соответственно. Возможные сочетания звеньев и кинематических пар приведены в таблице: , где n – количество подвижных звеньев, р 5, р 4 - количество кинематических пар 5-го и 4-го класса соответственно. Возможные сочетания звеньев и кинематических пар приведены в таблице:
Схематические изображения групп Ассура 2-го класса (два подвижных звена и три кинематические пары 5‑го класса):
Группы Ассура высших классов:
| Assure’s group | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Д | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Двигатель– энергетическая машина, предназначенная для преобразования энергии любого вида в механическую энергию твердого тела. | engine | ||||||||||||||||||||||||||||||||||||||||||||||||||
| движение механизма установившееся – движение звеньев механизма, при котором его обобщенная скорость есть периодическая функция времени. | steady-state motion | ||||||||||||||||||||||||||||||||||||||||||||||||||
движение относительное– движение материальной точки (или тела) по отношению к системе отсчета К, которая движется относительно другой системы отсчета К 1, условно принятой за неподвижную (абсолютную). Скорости и ускорения материальной точки в абсолютной системе К (скорости  и ускорения и ускорения  абсолютного движения) и в системе К 1 ( абсолютного движения) и в системе К 1 ( и и  ) связаны соотношениями ) связаны соотношениями  и и  , где , где  и и  – соответственно переносные скорость и ускорение, – соответственно переносные скорость и ускорение,  – Кориолиса ускорение. – Кориолиса ускорение.
| relative motion | ||||||||||||||||||||||||||||||||||||||||||||||||||
| движение переносное– движение подвижной системы отсчета по отношению к абсолютной (обычно инерциальной) системе отсчета (см. движение относительное). | transportation motion | ||||||||||||||||||||||||||||||||||||||||||||||||||
| движение прямолинейное– механическое движение, характеризующееся прямой траекторией. | straight-line [rectilinear] motion | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Демультипликатор– дополнительная коробка передач, включаемая последовательно с основной коробкой передач в трансмиссию и расширяющая диапазон возможных передаточных отношений. | demultiplica-tor; splitter, dual high transmission | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Деталь– часть изделия, в которой нет разъемных и неразъемных соединений. | detail, element, item, member, part | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Динамика– раздел механики, в котором рассматриваются закономерности механического движения тел под действием приложенных к ним сил. | dynamics | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Дифференциал (дифференциальный механизм)– механизм, обеспечивающий движение звеньев с различными скоростями при сохранении соотношения сил, действующих на эти звенья. | differential gear, jack-in-the-box | ||||||||||||||||||||||||||||||||||||||||||||||||||
| З | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Зазор– расстояние между двумя поверхностями сопряженных деталей. | clearance, backlash | ||||||||||||||||||||||||||||||||||||||||||||||||||
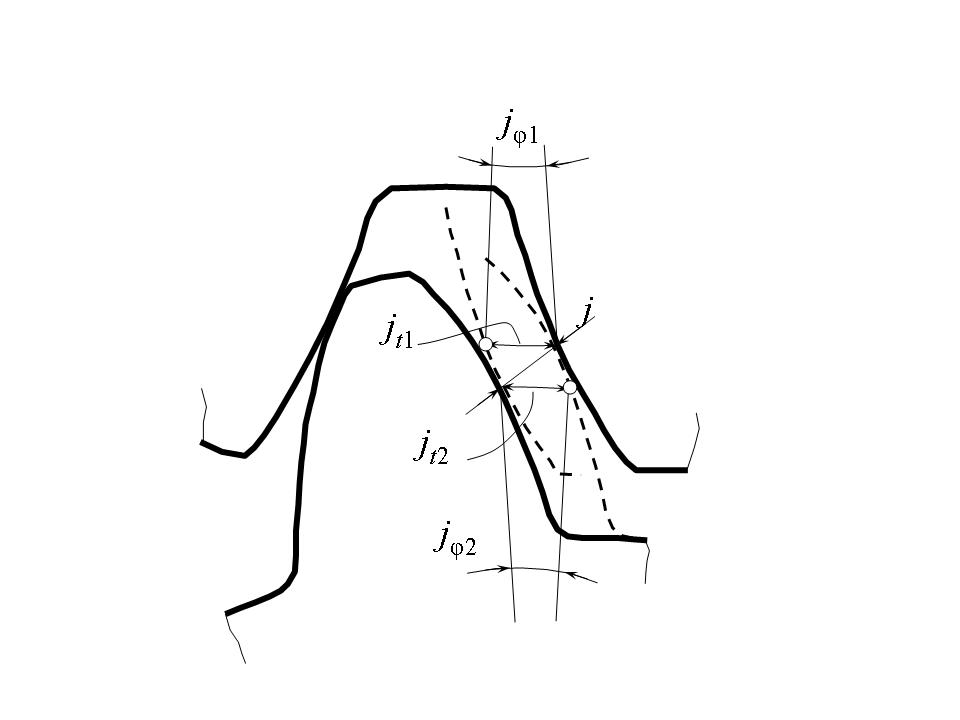 Зазор боковой – расстояние j между боковыми поверхностями зубьев зубчатых колес передачи, определяющее свободный поворот одного из зубчатых колес при неподвижном парном зубчатом колесе. Угол этого поворота называется угловым боковым зазором (j φ1 и j φ2 соответственно для колеса 1 и 2). Длина дуги jt 1 и jt 2 концентрической окружности зубчатого колеса называют окружным боковым зазором. Зазор боковой – расстояние j между боковыми поверхностями зубьев зубчатых колес передачи, определяющее свободный поворот одного из зубчатых колес при неподвижном парном зубчатом колесе. Угол этого поворота называется угловым боковым зазором (j φ1 и j φ2 соответственно для колеса 1 и 2). Длина дуги jt 1 и jt 2 концентрической окружности зубчатого колеса называют окружным боковым зазором.
| backlash, flank clearance | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Зазор боковой гарантированный – наименьший заданный боковой зазор зубчатой передачи (jn min). В зависимости от величины гарантированного бокового зазора регламентированы виды сопряжений зубчатых передач H, E, D, C, B, A – в порядке возрастания букв. См. рис. к статье Зазор боковой. | minimum [ backlash, flank clearance, side tooth clearance ] | ||||||||||||||||||||||||||||||||||||||||||||||||||
| замыкание механизма жесткое – прижатие звеньев, заготовок и т. п., обусловленное упругой деформацией звеньев механизма прижима в устойчивом положении. | rigid attachment | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Зацепление беззазорное– зубчатое зацепление без бокового зазора. | intimate (backlash-free) contact | ||||||||||||||||||||||||||||||||||||||||||||||||||
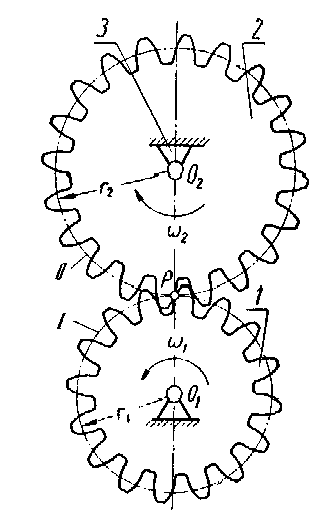 зацепление внешнее –зубчатое зацепление, при котором поверхности мгновенных осей вращения зубчатых колес в их относительном движении расположены одна вне другой. Эти поверхности радиусами rw 1 и rw 2 соприкасаются в точке Р. Колеса вращаются в противоположных направлениях с угловыми скоростями ω1 и ω2, обратно пропорциональными радиусам rw 1 и rw 2 или числам зубьев z 1 и z 2. Зубчатые колеса, образующие внешнее зацепление, называют колесами с внешними зубьями. зацепление внешнее –зубчатое зацепление, при котором поверхности мгновенных осей вращения зубчатых колес в их относительном движении расположены одна вне другой. Эти поверхности радиусами rw 1 и rw 2 соприкасаются в точке Р. Колеса вращаются в противоположных направлениях с угловыми скоростями ω1 и ω2, обратно пропорциональными радиусам rw 1 и rw 2 или числам зубьев z 1 и z 2. Зубчатые колеса, образующие внешнее зацепление, называют колесами с внешними зубьями.
| external gear(ing) | ||||||||||||||||||||||||||||||||||||||||||||||||||
зацепление внутреннее– зубчатое зацепление, при котором поверхности мгновенных осей вращения зубчатых колес в их относительном движении расположены одна внутри другой. Эти поверхности радиусами rw 1 и rw 2 соприкасаются в точке Р. Колеса вращаются в одинаковых направлениях с угловыми скоростями ω1 и ω2, обратно пропорциональными радиусам rw 1 и rw 2 или числам зубьев z 1 и z 2.
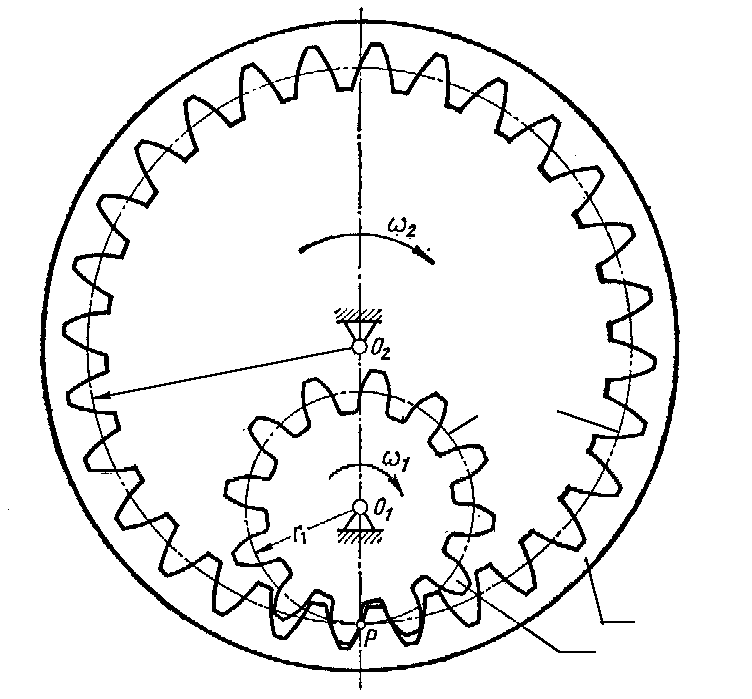 | internal gearing | ||||||||||||||||||||||||||||||||||||||||||||||||||
| зацепление зубчатое– высшая кинематическая пара с последовательно взаимодействующими элементами двух звеньев. | gearing, toothing | ||||||||||||||||||||||||||||||||||||||||||||||||||
| зацепление многопарное– зубчатое зацепление, в течение которого происходит взаимодействие двух и более пар зубьев. | multiple contact, multiple-tooth contact, multipair toothing | ||||||||||||||||||||||||||||||||||||||||||||||||||
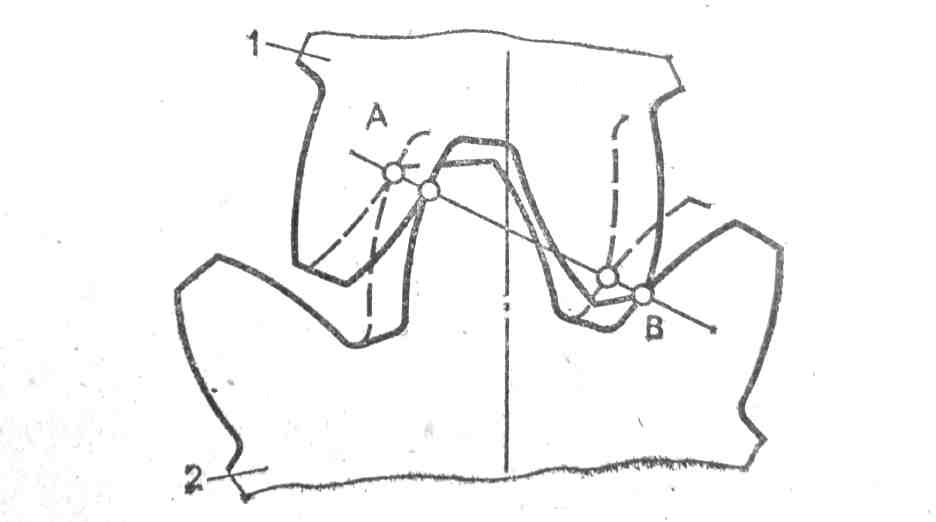 зацепление однопарное– зубчатое зацепление, в течение которого происходит взаимодействие одной пары зубьев. При взаимодействии колес 1 и 2однопарное зацеплениепроисходит между граничной точкой А и граничной точкой В. Для каждого из зубчатых колес верхняя граничная точка соответствует началу или окончанию однопарного зацепления и расположена около вершины зуба, а нижняя граничная точка также соответствует началу или окончанию однопарного зацепления, но расположена у ножки зуба. зацепление однопарное– зубчатое зацепление, в течение которого происходит взаимодействие одной пары зубьев. При взаимодействии колес 1 и 2однопарное зацеплениепроисходит между граничной точкой А и граничной точкой В. Для каждого из зубчатых колес верхняя граничная точка соответствует началу или окончанию однопарного зацепления и расположена около вершины зуба, а нижняя граничная точка также соответствует началу или окончанию однопарного зацепления, но расположена у ножки зуба.
| single tooth contact | ||||||||||||||||||||||||||||||||||||||||||||||||||
| зацепление цевочное– зубчатое зацепление посредством цилиндрических круговых элементов – цевок и зубьев с сопряженным профилем. | cogged (pin) meshing | ||||||||||||||||||||||||||||||||||||||||||||||||||
| зацепление циклоидальное– зубчатое зацепление, в котором сопряженные профили зубьев выполнены по циклоидальным кривым. | cycloid gearing | ||||||||||||||||||||||||||||||||||||||||||||||||||
| зацепление эвольвентное– зубчатое зацепление, в котором использованы сопряженные зубья, профиль которых выполнен по эвольвенте. Зацепление с эвольвентными зубьями было предложено Л. Эйлером в середине XVIII в., стало широко использоваться лишь в конце XIX – начале XX в. после того, как был предложен эффективный способ нарезания зубьев. | involute engagement | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Звено (механизма)– одно или несколько неподвижно соединенных относительно друг друга твердых тел, входящих в состав механизма. Различают звенья ведущие и ведомые. | link, member | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Звено ведомое– звено, для которого сумма элементарных работ внешних сил, приложенных к нему, отрицательна. | driven member (link), slave unit, follower | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Звено ведущее– звено, для которого сумма элементарных работ внешних сил, приложенных к нему, положительна. | driving member, driving link | ||||||||||||||||||||||||||||||||||||||||||||||||||
| звено входное– звено, которому сообщается движение, преобразуемое в требуемые движения других звеньев. Входное звено соединено с двигателем либо с выходным звеном другого механизма. | input member, input link | ||||||||||||||||||||||||||||||||||||||||||||||||||
| звено выходное– звено, совершающее движение, для выполнения которого предназначен механизм. | output link, output member | ||||||||||||||||||||||||||||||||||||||||||||||||||
| звено исполнительное– твердое тело, выполняющее в технологических машинах заданные перемещения с целью изменения или контроля формы, размеров и свойств обрабатываемого предмета. | effector, function element, work member, actuating link | ||||||||||||||||||||||||||||||||||||||||||||||||||
| звено начальное– звено, которому приписывается одна или несколько обобщенных координат механизма. Определять положения звеньев начинают с начального звена. Обычно в качестве начального звена выбирают входное или выходное звено, но можно и промежуточное звено, если при этом упрощается анализ механизма. Число начальных звеньев равно или меньше числа степеней свободы. Последнее имеет место, когда начальное звено характеризуется двумя или тремя координатами и образует со стойкой соответственно двух- или трех подвижную пару. | initial link | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Зуб– выступ на звене для передачи движения посредством взаимодействия с соответствующими выступами другого звена. | tooth | ||||||||||||||||||||||||||||||||||||||||||||||||||
| зуб эвольвентный– зуб зубчатого колеса, профиль которого очерчен по эвольвенте. | involute tooth | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Зубчатое колесо– см. Колесо зубчатое. | |||||||||||||||||||||||||||||||||||||||||||||||||||
| И | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Износ– изменение размеров, формы или состояния поверхности изделия вследствие разрушения (изнашивания) его поверхностного слоя. | deterioration, runout, loss, scuffing, tear, tearing, wear, wear-and-tear, wear-out, | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Износостойкость– сопротивление трущихся деталей изнашиванию. | wearing capacity, durability, endurance, wear life, wear resistance,wearability | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Инерция– свойство тел при отсутствии внешнего воздействия (или при воздействиях, взаимно уравновешивающих друг друга) сохранять неизменным состояние своего движения. Мерой инерции являются масса при поступательном движении тела и момент инерции тела относительно оси вращения при вращательном его движении. | inertia | ||||||||||||||||||||||||||||||||||||||||||||||||||
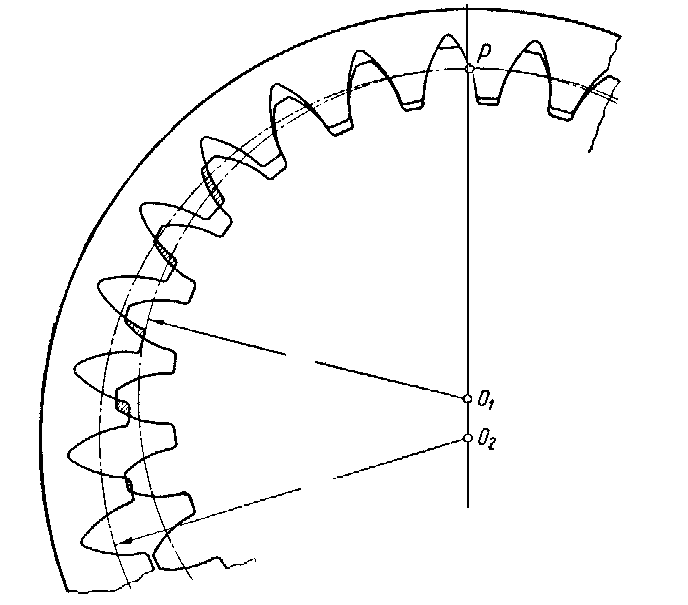 Интерференция зубьев– явление, заключающееся в том, что при рассмотрении теоретической картины зубчатого зацепления часть пространства оказывается одновременно занятой двумя взаимодействующими зубьями. Интерференция зубьев– явление, заключающееся в том, что при рассмотрении теоретической картины зубчатого зацепления часть пространства оказывается одновременно занятой двумя взаимодействующими зубьями.
| tooth interference | ||||||||||||||||||||||||||||||||||||||||||||||||||
| К | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Камень (кулисы)– звено поступательной пары, имеющее наименьшую протяженность. | radius link | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Кинематика– раздел механики, в котором изучаются геометрические свойства движения тел без учета их массы и действующих на них сил. | kinematics | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Кинематика механизмов– раздел теории механизмов и машин, в котором изучается движение звеньев механизма независимо от приложенных сил. Основные задачи: определение движения звеньев механизма по заданному движению одного или нескольких звеньев, называемых начальными; проектирование схемы механизма по заданным кинематическим условиям. | engineering kinematics | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Кинетостатика– раздел механики, в котором рассматриваются способы решения задач динамики методами статики. В основе кинетостатики лежит принцип Д΄Аламбера. | kinetostatics | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Класс кинематической пары– число связей, наложенных на относительное движение звеньев кинематической пары. | class of kinematic pair | ||||||||||||||||||||||||||||||||||||||||||||||||||
| колесо гибкое– упруго-деформируемое в процессе передачи движения зубчатое колесо (применяется в волновых передачах). | flexible gear | ||||||||||||||||||||||||||||||||||||||||||||||||||
| колесо жесткое – недеформируемое колесо в волновой зубчатой передаче (см. Передача зубчатая волновая). | rigid gear, circular spline, static spline | ||||||||||||||||||||||||||||||||||||||||||||||||||
| колесо зубчатое– звено с замкнутой системой зубьев, обеспечивающих непрерывное движение другого звена. | gear | ||||||||||||||||||||||||||||||||||||||||||||||||||
колесо 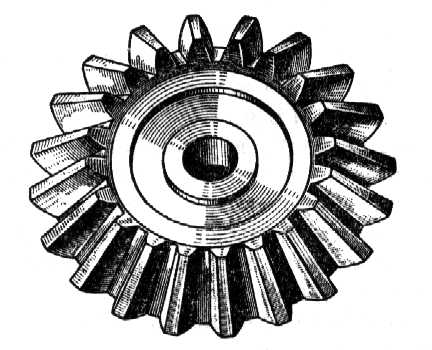 зубчатое коническое– зубчатое колесо конической зубчатой передачи (см. также рис. к статье передача зубчатая коническая).Различают кони-ческие колеса с прямыми (а), тангенциальными (б) и криволинейными зубьями (в). зубчатое коническое– зубчатое колесо конической зубчатой передачи (см. также рис. к статье передача зубчатая коническая).Различают кони-ческие колеса с прямыми (а), тангенциальными (б) и криволинейными зубьями (в).
| bevel gear | ||||||||||||||||||||||||||||||||||||||||||||||||||
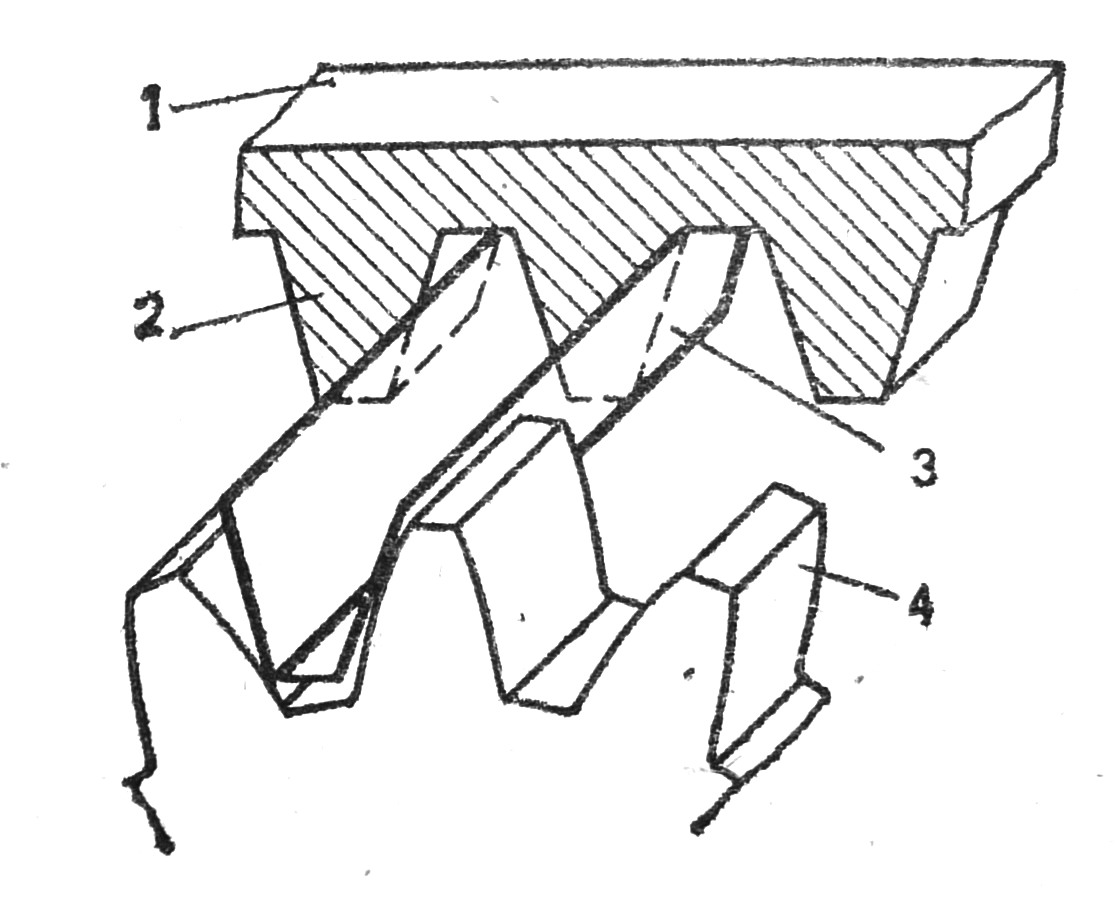 колесо зубчатое производящее – воображаемое зубчатое колесо 1 (в частном случае рейка 1), у которого боковыми поверхностями являются производящие поверхности – поверхности 3, содержащие режущие кромки инструмента или образуемые при их движении. Огибающей производящей поверхности в относительном движении является требуемая боковая поверхность зуба обрабатываемого зубчатого колеса 4. Контур 2 зубьев производящего зубчатого колеса называется производящим контуром зубчатого колеса. колесо зубчатое производящее – воображаемое зубчатое колесо 1 (в частном случае рейка 1), у которого боковыми поверхностями являются производящие поверхности – поверхности 3, содержащие режущие кромки инструмента или образуемые при их движении. Огибающей производящей поверхности в относительном движении является требуемая боковая поверхность зуба обрабатываемого зубчатого колеса 4. Контур 2 зубьев производящего зубчатого колеса называется производящим контуром зубчатого колеса.
| generating gear | ||||||||||||||||||||||||||||||||||||||||||||||||||
| колесо зубчатое с внутренними зубьями– зубчатое колесо, у которого зубья нарезаны на внутренней цилиндрической или конической поверхности (см. рис. к статье зацепление внутреннее) | internal gear, annular gear, ring gear, rim gear | ||||||||||||||||||||||||||||||||||||||||||||||||||
| колесо зубчатое цилиндрическое косозубое– цилиндрическое зубчатое колесо с косыми зубьями, теоретические линии которых эквидистантны и на развертке сосной цилиндрической поверхности являются параллельными прямыми. | helical gear | ||||||||||||||||||||||||||||||||||||||||||||||||||
| колесо зубчатое цилиндрическое прямозубое– цилиндрическое зубчатое колесо с зубьями, теоретические линии которых прямые и параллельны оси колеса. Из прямозубых колес составляют прямозубую цилиндрическую передачу. | spur gear | ||||||||||||||||||||||||||||||||||||||||||||||||||
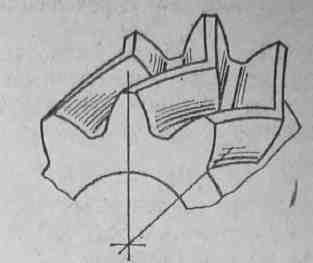 колесо зубчатое цилиндрическое шевронное – цилиндрическое зубчатое колесо, венец которого по ширине состоит из участков с правыми и левыми зубьями. Часть венцашевронного колеса, в пределах которого линиизубьев имеют одно направление, называют полушевроном. Шевронные зубчатые колеса используют в шевронной цилиндрической передаче. колесо зубчатое цилиндрическое шевронное – цилиндрическое зубчатое колесо, венец которого по ширине состоит из участков с правыми и левыми зубьями. Часть венцашевронного колеса, в пределах которого линиизубьев имеют одно направление, называют полушевроном. Шевронные зубчатые колеса используют в шевронной цилиндрической передаче.
| herringbone gear | ||||||||||||||||||||||||||||||||||||||||||||||||||
| limiting contour [ chart ] | ||||||||||||||||||||||||||||||||||||||||||||||||||
| контур замкнутый – совокупность последовательно соединенных звеньев (векторов), в которой любое из звеньев соединено с двумя другими звеньями. | (closed) kinematic loop | ||||||||||||||||||||||||||||||||||||||||||||||||||
контур исходный– контур зубьев номинальной исходной зубчатой рейки в сечении плоскостью, перпендикулярной ее делительной плоскости.
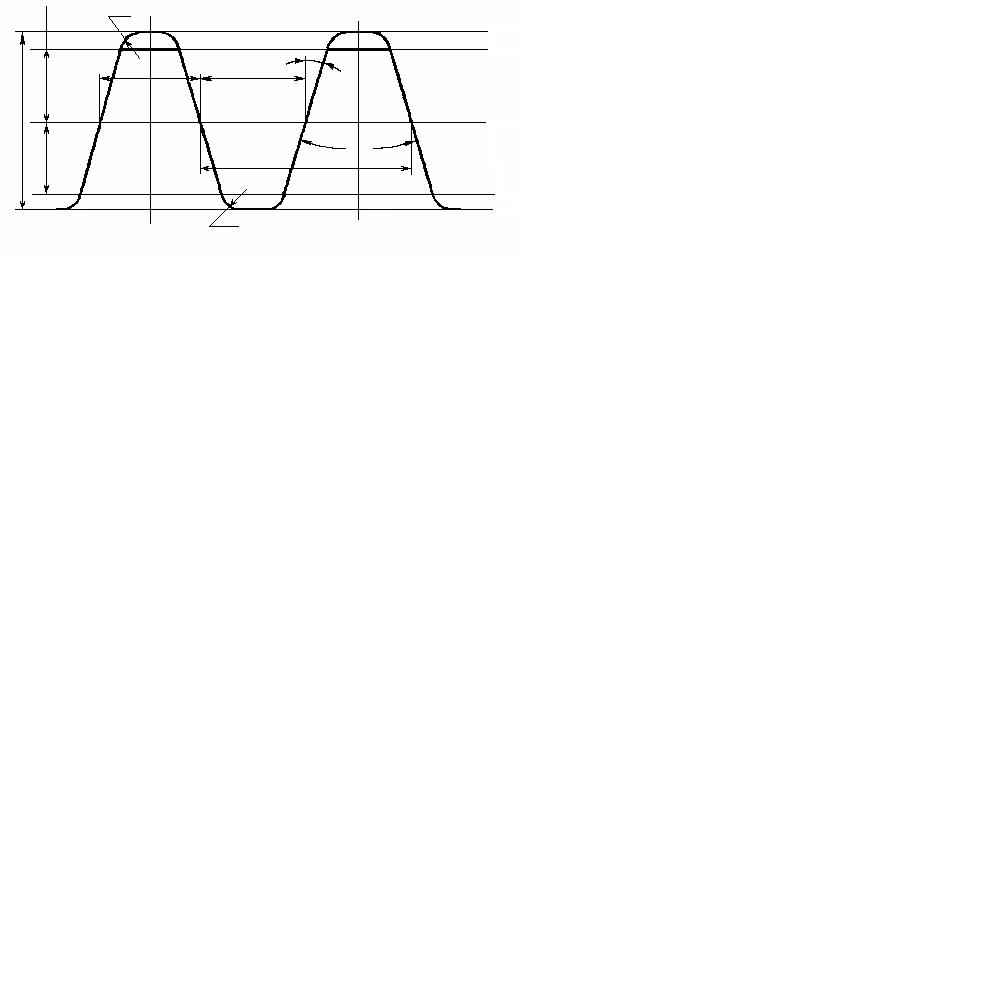
| basic rack profile, basic rack, original profile, reference profile | ||||||||||||||||||||||||||||||||||||||||||||||||||
координата обобщенная– каждый из независимых друг от друга параметров, однозначно определяющих соответствующие им и совместимые со связями положения материальных точек системы. Число обобщенных координат q 1, q 2, …, qw,однозначно определяющих положение механической системы, равночислу степеней свободы системы. Закон движения системы задают соответствующими этому числу уравнениями вида  , где t - время. Для механизма обобщенные координаты определяют положения звеньев относительно стойки. Обобщенными координатами может быть угол положения кривошипаи др. Указанных параметров достаточно, чтобы однозначно определить положение механизма в целом. , где t - время. Для механизма обобщенные координаты определяют положения звеньев относительно стойки. Обобщенными координатами может быть угол положения кривошипаи др. Указанных параметров достаточно, чтобы однозначно определить положение механизма в целом.
| generalized coordinate | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Коробка передач– механизм, в котором ступенчатое изменение передаточного отношения осуществляется при переключении зубчатых передач, размещенных в отдельном корпусе. | gear box, gearbox, transmission | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Коромысло– вращающееся звено, которое может совершать только неполный оборот вокруг неподвижной оси. | rocker | ||||||||||||||||||||||||||||||||||||||||||||||||||
| коэффициент динамичности – отношение максимальной абсолютной величины ускорения выходного звена с учетом упругости звеньев к максимальной абсолютной величине ускорения этого же звена без учета упругости звеньев. | dynamic factor | ||||||||||||||||||||||||||||||||||||||||||||||||||
Коэффициент неравномерности движения– отношение разности максимального и минимального значений обобщенной скорости механизма к его средней скорости за один цикл установившегося движения:
 , ,  . .
| coefficient of nonunifor-mity of motion | ||||||||||||||||||||||||||||||||||||||||||||||||||
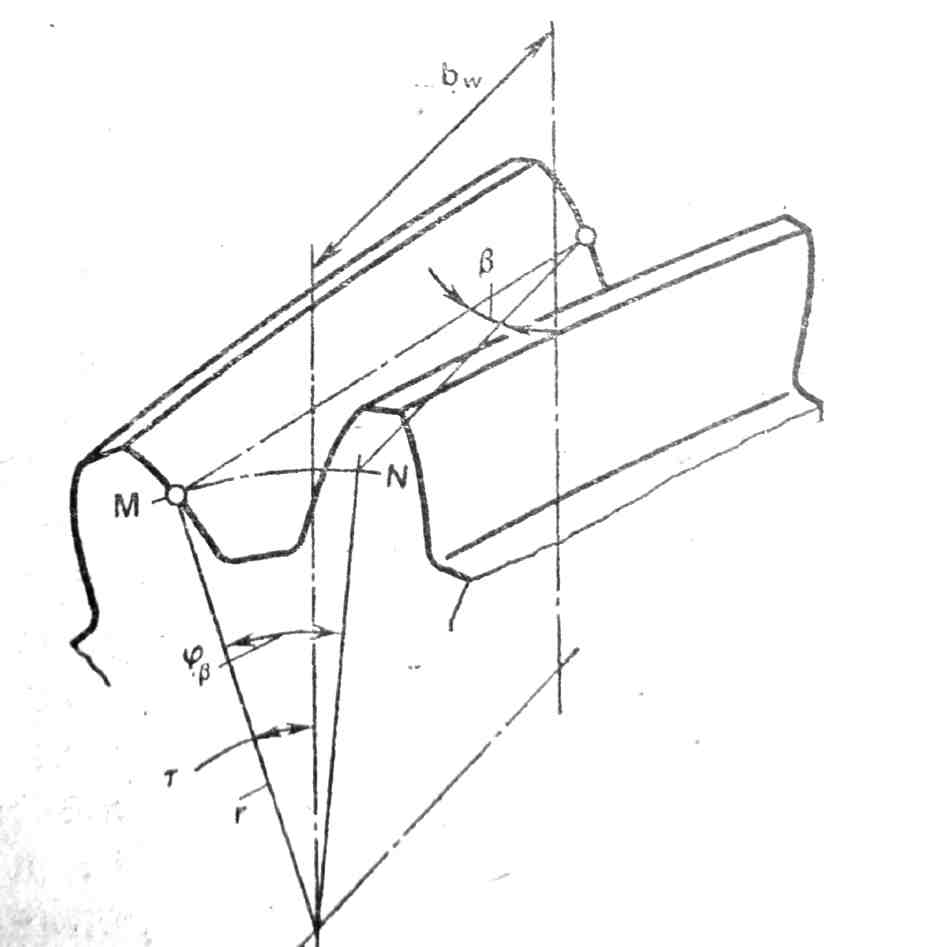
коэффициент осевого перекрытия– отношение угла осевого перекрытия φβ (угла поворота зубчатого колеса косозубой цилиндрической передачи, при котором общая точка контакта зубьев перемещается по линии зуба этого колеса от одного из торцов, ограничивающих рабочую ширину венца, до другого) к его угловому шагу τ:  .
Чем больше угол наклоналинии зуба β, тембольшую величинуεβ можно получить при той же рабочей ширине венца bw, таккак .
Чем больше угол наклоналинии зуба β, тембольшую величинуεβ можно получить при той же рабочей ширине венца bw, таккак  , а , а . Увеличение εβ позволяет повысить несущую способность, плавность работы передачи, уменьшить шум, но приводит квозрастанию скорости скольжения контактных точек вдоль линии зуба и осевой составляющей силы в зацеплении. . Увеличение εβ позволяет повысить несущую способность, плавность работы передачи, уменьшить шум, но приводит квозрастанию скорости скольжения контактных точек вдоль линии зуба и осевой составляющей силы в зацеплении.
| contact ratio-face | ||||||||||||||||||||||||||||||||||||||||||||||||||
| коэффициент перекрытия– отношение угла перекрытия φν (угла поворота зубчатого колеса от положения входа зуба в зацепление до выхода из него) к угловому шагу τ. Суммарный коэффициент перекрытия складывается из коэффициентов торцового и осевого перекрытий. | contact ratio (total) | ||||||||||||||||||||||||||||||||||||||||||||||||||
Коэффициент полезного действия– безразмерная величина, определяемая как отношение полезной работы ко всей затраченной работе за цикл:  . .
| efficiency | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Коэффициент смещения исходного контура– расстояние по нормали между делительной поверхностью зубчатого колеса и делительной плоскостью теоретической исходной зубчатой рейки при ее беззазорном зацеплении с зубчатым колесом. Смещение считается положительным, если делительная плоскость рейки не пересекает делительной поверхности зубчатого колеса, и отрицательным, если пересекает ее. | amount of addendum correction, profile shift coefficient, shifting coefficient | ||||||||||||||||||||||||||||||||||||||||||||||||||
| коэффициент торцового перекрытия– отношение угла торцового перекрытия (угла поворота зубчатого колеса от положения входа торцового профиля зуба в зацепление до выхода из него) к угловому шагу того же колеса. | contact ratio | ||||||||||||||||||||||||||||||||||||||||||||||||||
| кривая шатунная– траектория, описываемая какой-либо точкой шатуна. | coupler curve | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Кривошип– звено, совершающее полное вращательное движение. | crank, crankshaft | ||||||||||||||||||||||||||||||||||||||||||||||||||
| cam | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Кулиса– звено рычажного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару. | crank-guide, guiding, coulisse, mobile guide | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Л | |||||||||||||||||||||||||||||||||||||||||||||||||||
| линии эквидистантные– линии, отстоящие друг от друга на одинаковом расстоянии. | equidistant lines | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Линия автоматическая–совокупность машин-автоматов, соединенных между собой автоматическими транспортными устройствами и предназначенных для выполнения определенного технологического процесса. | automatic transfer line | ||||||||||||||||||||||||||||||||||||||||||||||||||
Поиск по сайту©2015-2024 poisk-ru.ru
Все права принадлежать их авторам. Данный сайт не претендует на авторства, а предоставляет бесплатное использование. Дата создания страницы: 2022-11-01 Нарушение авторских прав и Нарушение персональных данных |
Поиск по сайту: Читайте также: Деталирование сборочного чертежа Когда производственнику особенно важно наличие гибких производственных мощностей? Собственные движения и пространственные скорости звезд |