Фундаментальные принципы управления
САУ различаются в зависимости от вида используемой информации алгоритмом управления, под которым понимается совокупность предписаний, определяющих характер воздействия извне на ОУ с целью осуществления им заданного алгоритма функционирования.
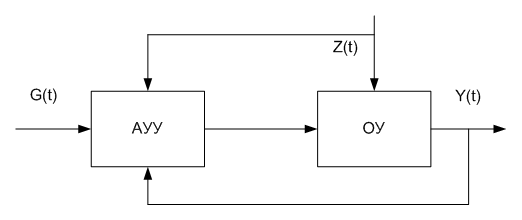
В обобщенной схеме САУ имеется три вида информации:
- об управляемой величине – Y;
- о задающей величине – G(или X);
- о возмущениях Z(или F), нарушающих нормальный ход технологического процесса.

Поэтому могут использоваться следующие принципы управления (алгоритмы управления):
1. Разомкнутое управление.
2. Управление по возмущению (принцип компенсации)
3. Управление по отклонению (принцип обратной связи)
При этом системы управления, которые построены по тому или иному принципу управления, делятся на:
- разомкнутые системы;
- замкнутые системы;
- комбинированные системы
1. Разомкнутое управление, – при котором значение управляемой величины Y не измеряется, т.е. нет контроля за состояние ОУ
Uв = KуU0 = 100 В, где Kу= 100 – коэффициент передачи усилительного устройства; U0 = 1 В;
Eг = KгUв, = 230 В, если ω = const и не учитывается нелинейность цепи возбуждения
где Kг= 2,3– коэффициент передачи генератора по управляющему воздействию
Uг = Eг – Rя I = Kр U0 – Kf I,
Kр = KуKг, = 230- коэффициент передачи разомкнутой САУ
Kf= Rя– коэффициент передачи генератора по возмущающему воздействию (по току)
Iном = 100 А; Rя = 0,1 Ом; Uг = 230 – 10 = 220 В

Наклон статической характеристики определяется статизмомS, который можно представить  ,
,
где Y0 – заданное значение управляемой величины (на холостом ходу),
Yном – значение управляемой величины при номинальной нагрузке.
Иногда термин статизм имеет другое название остаточная неравномерность.
Точность обеспечиваемого при этом соответствия между Y0 и Yном целиком определяется постоянством параметров системы и возмущений и никак не контролируется. Поэтому практически такие системы пригодны только при достаточно высокой стабильности условий работы системы и невысоких требованиях к точности. Действительные значения Y могут значительно отличаться от заданных значений, например, из-за изменения нагрузки Iн, частоты вращения приводного двигателя 𝜔, температуры обмоток и т.д.
Принцип управления с компенсацией возмущения (принцип Понселе)

При увеличении нагрузки I напряжение генератора Uг уменьшается, но благодаря действию сигнала по току нагрузки I напряжение возбуждения Uв генератора растет, таким образом, происходит компенсация влияния изменения нагрузки на Uг.
Uв = KуU0 + КиI, где Kи = Кд Ку = 0,05 В/А * 100 = 5 В\А – коэффициент передачи измерительной связи;
Кд= 0,075 В/А– коэффициент передачи датчика;
Eг = KгUв = Кг КуU0 + Kи КгI, где Kг= 2,3– коэффициент передачи генератора по управляющему воздействию;
Uг = Kр U0 – Kf I + КиКг I = 230 – 0,1 * 100 +0,075 * 100 = 225 В
Для того, чтобы S = 0, необходимо Ки Кг = Кf,
если Ки Кг> Кf, то S>0

Принцип компенсации возмущения позволяет существенно повысить точность управления в разомкнутых САУ. Однако точность остается невысокой вследствие невозможности охватить компенсацией все возмущения, действующие на ОУ, а также из-за изменения параметров ОУ во времени.
Достоинства САУ, работающих по разомкнутому циклу:
- значительная простота и быстрая реакция на возмущения (измеряемое);
- нет проблемы устойчивости САУ;
Недостатки САУ,работающих по разомкнутому циклу:
- невозможность компенсации неизмеряемых возмущений;
- возможность работы только с устойчивыми ОУ;
- колебания параметров САУ приводит к колебаниям управляемых величин.