Перегрузочные грейферные краны, установленные на рудном дворе, перемещаются по рельсовым путям и выполняют следующие операции:
‑переносят шихтовые материалы из приемной траншеи на рудный двор и штабелируют их для усреднения;
‑перегружают шихтовые материалы из штабелей в перегрузочный вагон и др.
В зависимости от типа конструкции моста перегрузочные краны разделяют на краны с решетчатым, вантовым и трубчатым мостом (рисунок 2.13). Рудный кран состоит из моста 1 и тележки 2. На металлоконструкциях у ног крана устанавливают противоугонные устройства 3 для исключения самопроизвольного перемещения при ветровой нагрузке. Современные краны, оборудуются аппаратурой, контролирующей перекос моста и скорость ветра. При аварийных перекосах или усилении ветра подаются звуковые и световые сигналы, механизмы выключаются и противоугонное устройство фиксирует положение крана.
Главные балки моста закреплены на двух ногах, которые опираются на ходовые тележки. Главные балки моста и ноги соединяются жёстко или шарнирно. В шарнирных конструкциях пространственная нога связана с фермами моста плоской опорой, имеющей вертикальную ось вращения, а плоская сферическим подпятником, допускающим поворот вокруг горизонтальной оси. Шарнирные узлы, обеспечивают возможность поворота моста в двух плоскостях:
‑ вгоризонтальной, на угол 4…50 для уменьшения напряжений в металлоконструкциях при несинхронном движении ног;
‑в вертикальной для компенсации температурных изменений длины моста.
В трубчатой конструкции, благодаря большей податливости главные балки моста и ноги соединены жёстко.
Краны оснащены тележками для их ремонта и обслуживания.
Один из основных параметров крана – пролёт, определяющий площадь обслуживания и совпадающий с размерами рудного двора. Пролёт составляет 70…90 м, но бывает и более 100 м. Консоли перекрывают пути расположенные у разгрузочной траншеи и на бункерной эстакаде. Высота крана около 25 м, Объём грейфера ‑ 5…7 м3. Масса крана – 800…900 т.


| Вертикальная ось вращения пространственной опоры |  Сферический подпятник плоской опоры
Сферический подпятник плоской опоры
|
Рудный кран с решётчатым мостом

Рудный кран с трубчатым мостом

Вантовый грейферный перегружатель
Рисунок 2.13 – Рудный перегружатель с решётчатым, вантовым и трубчатым мостом
Механизм передвижения тележки. Тележка рудного крана перемещается по нижнему поясу решётчатых балок моста или по двум консолям трубчатой главной балки. Рама тележки имеет четыре ходовых колеса. На ней размещены механизм подъёма грейфера, замыкания челюстей, передвижения тележки и центробежный вентилятор, обеспечивающий принудительное охлаждение двигателей. Рама тележки изготавливается сварной.
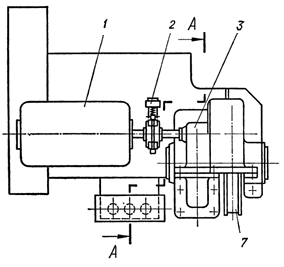
Между рамой и ходовыми колёсами установлены пружины, благодаря чему уменьшаются динамические нагрузки при зачерпывании материала и движении тележки. Чтобы улучшить сцепление с рельсами, все колёса делают приводными. Из-за подвижности рамы к осям ходовых колёс привод механизмов не может быть размещён на раме. Обычно ходовая часть выполняется в виде четырёх балансирных тележек, на каждой из которых расположен двигатель 1, тормоз 2, редуктор 3 и ходовое колесо 7 (рисунок 2.14). Рама 4 подвешена к балансиру на оси 5 и пружинах 6.
| 
|
Рисунок 2.14 – Балансиры механизма передвижения тележки
Механизм передвижения моста. Ноги крана опираются на ходовые тележки, каждая из которых имеет механизм передвижения (рисунок 2.15). Металлоконструкции ноги 5 опираются на балансиры 6, которые передают нагрузку двухосным ходовым тележкам 4. На раме каждой тележки установлены двигатель 3, тормоз 2 и редуктор 1, соединённый с осью ходовых колёс. Общее число тележек – 8, ходовых колёс – 32, половина из которых приводные. Скорость передвижения крана 25…30 м/мин. Мощность приводных двигателей – 20…40 кВт.

Рисунок 2.15 – Схема механизма передвижения моста
Противоугонное устройство. Краны, работающие на открытом воздухе и перемещающиеся по рельсовым путям, кроме тормозов механизмов передвижения должны иметь противоугонные устройства. Они служат для удерживания крана при ветровой нагрузке нерабочего состояния. Противоугонные устройства с машинным приводом управляются дистанционно из кабины машиниста или включаются автоматически от датчика скорости ветра.
Противоугонное устройство рудного крана (рисунок 2.16) выполнено в виде клещевых захватов с грузовым клином 2, перемещающихся между роликами 3. Рычаги 4 клещей закреплены на осях в массивных стяжках 5. Клещи захватывают головку рельса губками с насечкой, благодаря чему увеличивается коэффициент трения. Пружины 1 прижимают ролики к клину. Поднимаются клинья лебёдкой, установленной на затяжках ноги. Скорость подъёма (опускания) клина не превышает 0,2 м/с. Отход губок от рельсов с каждой стороны должен составлять 6…8 мм.

Рисунок 2.16 – Схема противоугонного устройства
Механизм подъёма и замыкания. При транспортировке сыпучих материалов грузозахватными элементами служат грейферы, которые по системе привода делятся на одно- и двухканатные. На рудных кранах применяются двухчелюстные грейферы двухканатного типа (рисунок 2.17). Основными элементами грейфера являются корпус 1, траверса 2 и челюсти 3. Грейфер подвешен на канатах подъёма, прикреплённых к корпусу, и канатах замыкания, которые вместе с блоками корпуса и траверсы образуют полиспаст. Эти увеличивает силы на кромках челюстей и улучшает зачерпывание материала.

|  1 – тяга; 2 – канаты подъёма; 3 – неподвижные блоки; 4 – канаты открывания и закрывания челюстей; 5 – корпус; 6 – подвижные блоки; 7 ‑ челюсти
1 – тяга; 2 – канаты подъёма; 3 – неподвижные блоки; 4 – канаты открывания и закрывания челюстей; 5 – корпус; 6 – подвижные блоки; 7 ‑ челюсти
|

|
Рисунок 2.17 ‑ Грейфер
Цикл работы грейфера включает четыре периода: опускание, зачерпывание, подъём и разгрузку. У грейферов двухканатного типа канаты подъёма и замыкания могут перемещаться совместно (подъём, опускание) или независимо друг от друга (зачерпывание, разгрузка). При подъёме грейфера с материалом должно быть обеспечено синхронное движение канатов, так как ослабление канатов приводит к самопроизвольной разгрузке. Для выполнения этого условия ранее использовался планетарный редуктор, а оба барабана приводились в движение от одного двигателя и при подъёме и при опускании.
В настоящее время, механизмы подъёма и замыкания челюстей грейфера выполняются с независимым вращением барабанов (рисунок 2.18). Грейфер приводится в движение двумя двигателями, работа которых синхронизируется электрически. В конце периода зачерпывания появляются кратковременные перегрузки, не превышающие максимальный момент двигателя.

Рисунок 2.18 – Схема механизмов подъёма и замыкания грейфера:
1 – двигатель механизма замыкания; 2 – двигатель механизма подъёма
 Решётчатый мост
Решётчатый мост
|  Трубчатый мост
Трубчатый мост
|
 Трубчатый мост
Трубчатый мост
|  Вантовый мост
Вантовый мост
|
Общий вид крана
 Плоская нога
Плоская нога
|  Пространственная нога
Пространственная нога
|
 Решётчатый мост
Решётчатый мост
|  Грейфер
Грейфер
|
 Консоль
Консоль
|  Консоль
Консоль
|
 Пространственная опора вантового моста
Пространственная опора вантового моста
|  Плоская опора вантового моста
Плоская опора вантового моста
|
 Перегрузочный вагон
Перегрузочный вагон
|  Мост
Мост
|
Элементы крана

|  Обрыв корпуса верхних полиспастов
Обрыв корпуса верхних полиспастов
|

| 
|

| 
|
| Разрушение моста | |

| 
|
| Обрушение консольной части | |

| 
|
| Коррозия металлоконструкций | |
 Разрушение опоры ноги
Разрушение опоры ноги
| |

|  Коррозия заклёпок
Коррозия заклёпок
|

|  Электрозаклёпки
Электрозаклёпки
|

| 
|
| Усиление соединительных узлов металлоконструкций | |

| 
|
Аварии и повреждения кранов