Дисциплина: 01.04. Техническое регулирование и контроль качества электрического и электромеханического оборудования
Группа: ЗТЭЭО-18
Дата: 09 октября 2020 года
Преподаватель: Ларионов О.Ф.
Задание: Фото выполненной работы прислать на электронный адрес https://vk.com/id597471949 ВКонтакте (Название файла с ответами: номер занятия,
МДК 01.04, гр. ЗТЭЭО-18, Фамилия имя студента)
Срок выполнения: до 12 октября 2020 года.
Занятие № 14
Тема: Изучение схемы управления одноковшовым экскаватором
.
Цель занятия:
Методическая: Формирование знаний студентов по изучаемому материалу
Дидактическая: Ознакомление с работой автоматической системы управления одноковшовым экскаватором.
Развивающая: Развить логическое мышление, наблюдательность, умение правильно обобщать данные и делать выводы.
Воспитательная: Привить профессиональные качества: внимание, ответственность, интерес к будущей профессии.
План занятия:
1. Характеристика систем управления экскаватором.
2. Система автоматизированного управления экскаватором.
Содержание лекции:
При ручном регулировании машинист, желая поддержать определенную частоту вращения двигателя, воздействует на цепь возбуждения генератора, т. е. изменяет величину тока в обмотке возбуждения генератора с помощью реостата, командоконтроллера или иного устройства.
Таким образом, имеет место направленная цепь воздействий: машинист посредством реостата или другого устройства воздействует на ток (поток) возбуждения генератора; последний вызывает изменение напряжения на якоре генератора; от величины напряжения генератора уже зависит частота вращения двигателя. Эта цепь воздействий, называемая основной, имеет одну цель — управлять частотой вращения двигателя. Начало этой направленной цепи воздействий называется входом системы управления, конец — выходом. Соответственно различают входные и выходные величины системы.
Входной величиной (входным воздействием) является величина тока или напряжения, подаваемого на обмотку возбуждения генератора, выходной величиной — частота вращения рабочего механизма.
Машинист, воздействуя на вход системы (на цепь возбуждения генератора), изменяет частоту вращения двигателя и по показанию измерительного прибора или скорости хода рабочего механизма определяет ее величину.
В качестве измерительного прибора используется вольтметр, включаемый на зажимы якоря генератора, поскольку скорость двигателя пропорциональна напряжению генератора. По вольтметру машинист постоянно наблюдает за скоростью двигателя и в случаях отклонения ее от заданной величины соответственно этому отклонению оказывает то или иное воздействие на систему.
Отсюда видно, что для поддержания неизменным заданного напряжения генератора (частоты вращения двигателя рабочего механизма) вручную, без применения автоматики машинист должен был бы, во-первых, наблюдать за показаниями вольтметра, во-вторых, сравнивать эти показания с заданной величиной (допустим, задано поддерживать напряжение на генераторе 500 в) и, в-третьих, при разности между заданной и наблюдаемой величинами передвигать ручку реостата, изменяя тем самым ток в обмотке возбуждения и напряжение генератора, чтобы эта разность стала равной нулю.
По показаниям другого прибора — амперметра, включенного в силовую цепь Г—Д, машинист наблюдал бы за величиной тока в якорной цепи и в случаях, когда эта величина тока становилась бы выше допустимой, снижал напряжение генератора и тем самым уменьшал ток в якорной цепи.
Система автоматического управления (рис. 1) должна выполнять те же функции. Для поддержания заданного значения выходной величины (напряжения генератора) без участия машиниста необходимо, чтобы в системе непрерывно сравнивалось действительное значение выходной величины с заданным. В результате сравнения должно оказываться воздействие на вход системы, которое восстанавливало бы заданное значение выходной величины.
Следовательно, для автоматического регулирования необходимо прежде всего воздействие выходной величины системы на ее вход. Это воздействие называется обратной связью.
При ручном регулировании обратная связь осуществляется машинистом на основании показаний вольтметра. Машинист постоянно сравнивает показания вольтметра с заданной величиной напряжения и сообразно этому принимает решение о том, как изменить входную величину (ток в обмотке возбуждения). Очевидно, что при увеличении напряжения генератора сверх допустимого значения машинист уменьшал бы ток в обмотке возбуждения, а при уменьшении напряжения генератора увеличивал бы его.
Итак, обратная связь (как и машинист) в автоматической системе регулирования с целью поддержания заданной величины напряжения генератора должна действовать встречно входной величине: снижать ее при увеличении выходной величины и увеличивать при уменьшении выходной величины. Такая обратная связь, действующая встречно основному воздействию, называется отрицательной.
Исходя из сказанного, структурная схема системы автоматического регулирования и управления должна иметь следующие элементы:
1. Измерительный элемент (датчик), который измеряет величину, подлежащую управлению (регулированию) в данном объекте, и преобразует ее в величину другого вида, более удобную для воздействия на элемент сравнения.
2. Элемент сравнения, где сигналы датчика сравниваются с предписанным значением регулируемой величины (с заданием) и при наличии расхождения их передает соответствующие командные воздействия на исполнительный орган.
3. Задающий элемент, для установки заданного значения регулируемой величины.
4. Исполнительный орган, который исполняет командное воздействие и в соответствии с этим восстанавливает заданное значение регулируемой величины.
В приведенном выше примере при ручном регулировании объектом управления является двигатель механизма, регулируемой величиной — частота вращения двигателя (вернее, напряжение генератора), датчиком — вольтметр, исполнительным органом — генератор, задающим элементом — реостат, а функции управляющего органа (элемент сравнения) выполнял человек.
2. Система автоматизированного управления экскаватором.
В системе автоматизированного электропривода экскаватора, представленной на рис. 1, измерительным элементом служит обмотка управления магнитного усилителя ОН, включенная на напряжение генератора. При изменениях напряжения генератора в ней изменяется величина тока, т. е. сигнал обратной связи.
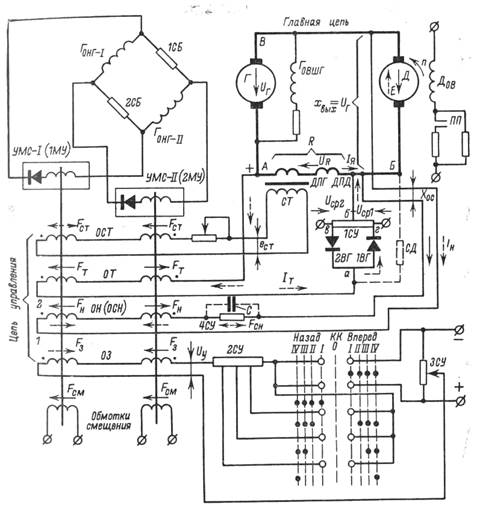
Рис. 1. Принципиальная упрощенная схема системы управления главными электроприводами экскаватора
В результате сравнения вырабатывается на выходе магнитного усилителя результирующее управляющее воздействие (сигнал возбуждения). Значение и знак выходного сигнала СМУ зависят от того, насколько и в каком направлении действительное текущее значение выходной (регулируемой) величины системы отклонилось от заданного. Этот сигнал поступает в независимую обмотку возбуждения генератора, т. е. в исполнительный орган, который и восстанавливает прежнее значение напряжения. Как это осуществляется, видно из следующего.
Допустим, что по каким-либо причинам увеличился момент сопротивления вращению рабочего механизма, т. е. статическая нагрузка в системе Г—Д. Увеличение момента вызовет как возрастание тока, потребляемого двигателем Д, так и понижение регулируемой величины—напряжения на зажимах генератора Г за счет увеличения потери напряжения в нем. В этом случае уменьшится напряжение на зажимах обмотки ОН усилителя, а следовательно, ее ток и н. с. генератора. Тогда при неизменном значении командного сигнала F3 (н. с. задающей обмотки 03) увеличится результирующая н. с. магнитного усилителя, а в итоге и ток его выхода. При этом ток возбуждения в независимой обмотке генератора Гонг и напряжение генератора возрастут, т. е регулируемая величина будет стремиться к прежнему заданному значению. Так происходит автоматическое поддержание (стабилизация) заданной скорости вращения рабочего механизма.
Система регулирования, где выходная величина связана с ее входом через обратную связь, называется замкнутой системой, а подобная обратная связь — главной, основной. Помимо нее, бывают другие (вспомогательные, промежуточные) обратные связи для стабилизации системы и улучшения качества регулирования, а также для ограничения момента при стопорении двигателя.
В общем случае обратная связь может быть положительной, отрицательной, жесткой, гибкой и задержанной.
При положительной обратной связи ее сигнал действует согласно с входным воздействием (складывается), при отрицательной — встречно (вычитается). Если воздействие выходной величины непрерывно и пропорционально значению регулируемой величины, то обратная связь называется жесткой. В схеме управления экскаватором Э-2503 главная обратная связь жесткая отрицательная и называется обратной непрерывно действующей связью по напряжению генератора.
Если воздействие выходной величины пропорционально скорости ее изменения, то она называется гибкой. Сигнал гибкой обратной связи не зависит непосредственно от выходной величины (как это имеет место при жесткой обратной связи), а зависит только от скорости изменения. Поэтому гибкая обратная связь действует если К0 в переходном режиме и исчезает в установившемся режиме работы системы. Гибкую обратную связь иногда называют исчезающей, в то время как жесткая обратная связь действует во всех режимах работы системы.
На рис. 1 в цепь обмотки ОН параллельно установочному сопротивлению 4СУ подключена емкость С, благодаря чему обмотка ОН, кроме функции отрицательной обратной связи по напряжению, выполняет еще дополнительную функцию — гибкой отрицательной обратной связи но напряжению генератора. Действительно, в установившемся режиме работы системы Г—Д конденсатор заряжен (ток через него не проходит); тогда обмотка ОН выполняет роль только жесткой обратной связи по напряжению генератора. В этом случае величина ее н. с. FB при прочих условиях определяется только сопротивлением 4СУ. При переходных процессах (в моменты изменения напряжения генератора) конденсатор либо заряжается, либо разряжается, т. е. пропускает ток заряда. Поэтому в переходных режимах в обмотке ОН появляется дополнительная н. с. Fсн, направленная в сторону снижения интенсивности изменения э. д. с. генератора, т. е. Fy=F3—FH±FCB. Посредством обмотки ОН осуществляются регулирование темпа переходных режимов (затягивание процессов нарастания и спадания напряжения генератора) и стабилизация системы от появления устойчивых колебаний напряжения генератора.
Узел обмотки усилителя ОТ. Если воздействие выходной величины на вход начинается только после достижения регулируемой величиной определенного наперед заданного значения, то обратная связь называется задержанной. Примером такой задержанной обратной связи в схеме управления экскаватором Э-2503 является жесткая отрицательная токовая обратная связь, т.e. действие задерживается определенным образом включенным через полупроводниковые вентили независимым напряжением сравнения Ucv. Задержанная обратная связь по току нагрузки двигателя вступает в действие только тогда, когда ее напряжение UR (падение напряжения на сопротивлении при прохождении тока Iя) превысит напряжение сравнения Ucv (рис. 1).
Задержанная обратная связь по току часто называется отрицательной обратной связью по току с отсечкой (сокращенно — токовой отсечкой).
Рассмотрим подробнее работу токового узла в системе, изображенной на рис. 1, в статическом режиме при увеличении нагрузки на валу двигателя.
Узел отрицательной обратной токовой связи с отсечкой состоит из обмоток ОТ, германиевых или кремниевых полупроводниковых выпрямителей 1ВГ и 2ВГ и токового потенциометра сравнения 1СУ. Работа узла в двигательном режиме и для положения КК «Вперед»! поясняется на рис. 1. При прохождении тока в главной цепи на сопротивлении R (условно обозначающем сопротивления обмоток ДПР и ДПД) создается, как уже отмечалось, падение напряжения UR. Это контролируемое напряжение UR непрерывно сравнивается с внешним встречным «напряжением сравнения» (эталонным напряжением или запирающим потенциалом)
Таким образом, для схемы на рис. 1 экскаваторная характеристика практически горизонтальна до тех пор, пока сохраняется условие. В этом случае начальная (рабочая) часть характеристики двигателя обусловливается действием только одной обратной связи по напряжению, так как связь по току не работает; поэтому жесткость характеристики на участке ad определяется действием только связи по напряжению генератора.
При UR=UCр происходит излом в характеристике (точка d). Ток главной цепи, соответствующий этому моменту, называется током отсечки I отс, а сам момент Мотс — началом работы токового узла (токовой отсечки).
Наконец, при UR>Uср наступает процесс размагничивания генератора и характеристика имеет крутопадающую часть (dc). Ток главной цепи в точке с, где заканчивается размагничивание генератора и напряжение на его выходе становится близким к нулю (двигатель останавливается), называется стопорным током I ст. Величина напряжения генератора в этом режиме упора определяется падением напряжения при прохождении тока Iст по цепи якоря двигателя, т. е. произведением
Из изложенного выше следует, что начало действия токового узла зависит от величины запирающего напряжения на участке сравнения или потенциометра токового узла. Следовательно, регулирование величины предельного (стопорного) тока при эксплуатации и наладке можно осуществлять путем изменения величины сопротивления участка потенциометра. При этом изменяется положение точки d экскаваторной характеристики, а угол наклона крутопадающего участка почти не изменяется (он зависит от интенсивности действия обмотки ОТ).
Узел обмотки усилителя ОСТ. Стабилизирующая обмотка усилителя, выполняющая роль гибкой отрицательной обратной связи по току главной цепи, подключается через сопротивление на специальную стабилизирующую (вторичную) обмотку, размещенную на дополнительных полюсах генератора, где первичной обмоткой является основная обмотка дополнительного полюса. Во время переходных процессов и при изменениях тока главной цепи во вторичной (стабилизирующей) обмотке наводится э. д. е., которая создает ток и н. с. в обмотке. Действие последней направлено против изменений тока якоря, а степень ее противодействия тем больше, чем резче происходят изменения тока. При этом уменьшаются толчки при резких изменениях нагрузки и достигается стабилизация (устойчивость) работы системы в динамическом режиме.
Таким образом, сочетание различных обратных связей ОН, ОТ, ОСИ, ОСТ с введением в отрицательную обратную связь по току отсечки создает в рассматриваемой схеме системы Г—Д со СМУ (УМГ—Д) экскаватора Э-2503 возможность автоматического обеспечения заданных статической и динамической экскаваторных характеристик движения рабочего механизма.
Контрольные вопросы:
1. Какие функции в схеме выполняет генератор?
2. Какие функции в схеме выполняет СМУ?
Литература:
1. Поспелов Л.П. Рудничная автоматика и телемеханика. – М.: Недра, 1982, с. 332
Домашнее задание:
1. Изучить материал лекции и материал в литературе [1], с. 110-114
2. Ответить на контрольные вопросы
Критерии оценивания выполненного домашнего задания:
Выполненная домашняя работа оценивается по пятибалльной системе:
5 «отлично» - на все контрольные вопросы в конспекте письменно даны исчерпывающие ответы, материал изложен логично и правильно, без ошибок, что подтверждает полноту изучения и глубокое понимание студентом материала;
4 «хорошо» - на все контрольные вопросы в конспекте письменно даны исчерпывающие ответы, но допущены неточности в формулировках и форме построения ответа, а объем и содержание ответов студента указывают на достаточный объём изучения студентом материала;
3 «удовлетворительно» - на все контрольные вопросы в конспекте письменно даны ответы в недостаточном объёме, допущены неточности и ошибки в формулировках, а объем и содержание ответов указывают на знание основных, существенных положений учебного материала;
2 «неудовлетворительно» - нет ответа на один из вопросов, а на остальные вопросы даны неполные ответы, содержащие недостаточный объём информации для полноты выполнения своих профессиональных навыков, указывающие на не знание основных положений учебного материала.