Системы координат
При изучении БЛА важно понять, как различные тела ориентируются друг относительно друга. Очевидней всего, что нужно понять, как самолет ориентируется относительно Земли. Также необходимо знать, как датчик (например, бортовая камера) ориентируется относительно ЛА или как антенна ориентируется относительно наземного источника сигнала. Пользоваться несколькими различными СК необходимо по следующим причинам:
· Уравнения движения Ньютона выведены относительно неподвижной инерциальной СО. Однако движение проще всего описывается в СО неподвижного тела или связанной системе.
· Аэродинамические силы и моменты, действующие на корпус ЛА, также проще всего описываются в связанной СО.
· Бортовые датчики, такие как акселерометры и датчики угловой скорости, получают информацию относительно связанной СК. Альтернативно этому GPS определяет положение, скорость относительно Земли и курсовой угол относительной инерциальной СК.
· Большинство требований к полету, таких как точки патрулирования и траектории полета, задаются в инерциальной СК. Кроме того, информация на карте также дается в инерциальной СО.
Одна СК преобразуется в другую с помощью двух базовых операций: поворота и сдвига [6].
Матрицы вращения
Рассмотрим две СК, представленных в соответствии с рисунком 1.3.1.1. Вектор p может быть выражен в СК Φ0 (заданной (i0, j0, k0)) и в СК Φ1 (заданной (i1, j1, k1)). В СК Φ0 имеем
 .
.

Рисунок 1.3.1.1 – Вращение в двумерном пространстве
Альтернативно этому в СО Φ1 имеем
 .
.
Системы векторов (i0, j0, k0) и (i1, j1, k1) по отдельности взаимно перпендикулярны системе единичных базисных векторов.
Приравнивая оба эти друг другу, получим
 .
.
Взяв скалярное произведение обеих сторон с i1, j1 и k1 соответственно и сформировав полученные результаты в матричном виде, получим

Из геометрии в соответствии с рисунком 1.3.1.1 получим
 , (1.3.1.1)
, (1.3.1.1)
где
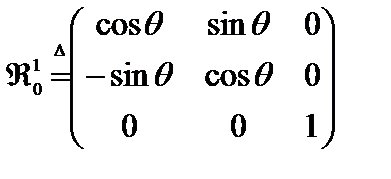 ,
,
Символ  используется для обозначения поворота из СК Φ0 в СК Φ1.
используется для обозначения поворота из СК Φ0 в СК Φ1.
Продолжая аналогичным образом, поворот СК по часовой стрелке вокриг оси y дает
 ,
,
и поворот по часовой стрелки СК вокруг оси x дает
 .
.
Как отмечалось в [7], отрицательный знак у синусов появляется над линией с одними нулями и единицами.
Матрица в приведенных выше уравнениях является примером более общего класса ортонормальных матриц поворота, которые имеют следующие свойства:
 ,
,
 ,
,
 ,
,
где det(‧) является детерминантом матрицы.
При выводе уравнения (1.3.1.1) следует отметить, что вектор p остается постоянным и что новая СК Φ1 была получена поворотом системы Φ0 по часовой стрелке на угол θ. Альтернативно этому матрицы вращений могут быть использованы для поворота вектора на заданный угол в неподвижной СО. В качестве примера рассмотрим поворот при вращении против часовой стрелки вектора p в СК Φ0 вокруг оси k0 на угол θ, как это показано в соответствии с рисунком 1.3.1.2.
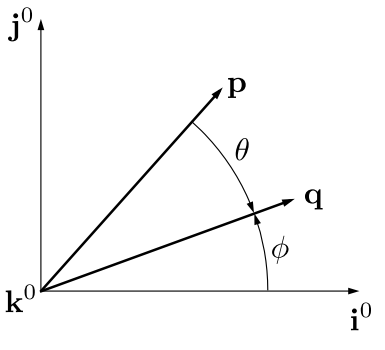
Рисунок 1.3.1.2 – Поворот p вокруг оси k0
Предположив, что p и q находятся в плоскости i0-j0, можно записать компоненты p и q в виде
 (1.3.1.2)
(1.3.1.2)
и
 , (1.3.1.3)
, (1.3.1.3)
где  .
.
Выражая уравнение (1.3.1.2) в терминах (1.3.1.3), получим

и
 .
.
В этом случае матрица вращения может быть интерпретирована как поворот против часовой стрелки вектора p на угол 𝜃 на место нового вектора q в той же СК. Заметьте, что поворот вектора по часовой стрелке (в этом случае из q в p)можно получить с помощью  . Эта интерпретация отличается от нашего первоначального использования матрицы вращения для преобразования неподвижного вектора p из его представления в СК Φ0 в его представление в СК Φ1, где Φ1 была получена из Φ0 поворотом по часовой стрелке.
. Эта интерпретация отличается от нашего первоначального использования матрицы вращения для преобразования неподвижного вектора p из его представления в СК Φ0 в его представление в СК Φ1, где Φ1 была получена из Φ0 поворотом по часовой стрелке.
Система координат беспилотного летательного аппарата
Чтобы получить и понять динамическое поведение БЛА, потребуется несколько СК. В этом разделе определены и описаны следующие СК: инерциальная СК, СК ЛА, СК ЛА-1, СК ЛА-2, связанная СК, полусвязанная СК и скоростная СК. Инерциальная СК и СК ЛА связаны между собой сдвигом, тогда как остальные СК – поворотами. Углами, определяющими относительную ориентацию ЛА для СК ЛА-1, ЛА-2 и связанной СК, являются угол крена, угол тангажа и угол рыскания, которые описывают высоту ЛА. Эти углы общеизвестны как углы Эйлера. Углы поворота, которые определяют СК относительной ориентации тела, его устойчивость и скорость ветра, являются углом атаки и углом бокового увода. На протяжении всей книги предполагается, что Земля плоская и что она не вращающаяся, что вполне обоснованно для БЛА.