Широкое применение микроЭВМ в качестве бортовых управляющих комплексов повышает эффективность локомотивных автоматических систем, расширяет их функциональные возможности, снижает массо-габаритные показатели, а за счет реализации более эффективных алгоритмов снижается расход топлива, электроэнергии и улучшатся тяговые свойства локомотивов. При этом переносить известные относительно простые алгоритмы регулирования, реализованные аппаратным способом, на микропроцессорную элементную базу нецелесообразно.

|
Аппаратура микропроцессорных систем автоматического регулирования осуществляет ввод информации от датчиков или командных устройств, логическую обработку этой информации в заданной последовательности и вывод полученных результатов для управления исполнительными устройствами. Задачи, решаемые каждым конкретным устройством, определяются алгоритмом его работы – упорядоченной последовательностью действий с конечным числом операций, приводящей к получению определенного результата. Последовательность выполнения операций – программа работы – закладывается в структуру электрической схемы и связи между программными и аппаратными средствами – электронными и электромеханическими элементами, входящими в состав системы.
Система УСТА объединяет два независимых друг от друга регулятора напряжения - регулятор напряжения тягового генератора и регулятор напряжения стартер-генератора, которые кроме собственно регулирования напряжения, выполняют еще несколько дополнительных функций.
Конструктивно система выполнена в виде имеющего модульную конструкцию блока регулирования и набора датчиков, количество которых зависит от варианта исполнения системы, и соединительных проводов.
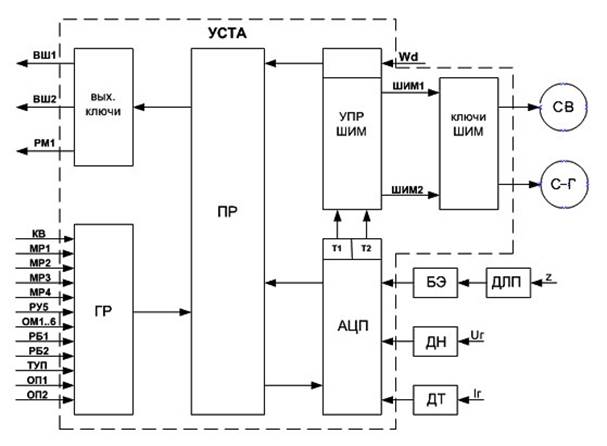
Вычислительная часть системы УСТА представлена модулем процессора (ПР), в котором располагается однокристальная микроЭВМ – это интегральная микросхема, которая содержит все логические элементы необходимые для образования полноценной вычислительной системы. Она предназначена для обработки числовой информации о состоянии объекта регулирования и определения необходимых управляющих воздействий на объект.
|
Интерфейсная часть системы включает средства ввода аналоговых сигналов, дискретных сигналов, частотных сигналов, средства вывода дискретных управляющих сигналов и средства вывода аналоговых управляющих сигналов. Она представлена пятью модулями: модулем аналого-цифрового преобразователя (АЦП), модулем ввода дискретных сигналов (ГР), модулем выходных ключей (ВЫХ КЛЮЧИ), модулем управления широтно-импульсным модулятором (УПР ШИМ) и модулем силовых ключей ШИМ (КЛЮЧИ ШИМ) и предназначена для обеспечения связи вычислительной части системы с объектом регулирования. К интерфейсной части системы относятся также датчики, обеспечивающие первичное преобразование аналоговых сигналов, характеризующих режим работы дизель – генераторной установки тепловоза.
Она выполняет следующие основные функции:
- ввод в вычислительную часть аналоговых непрерывных) гальванически развязанных сигналов (z, UТГ, IТГ), характеризующих значения параметров состояния объекта регулирования (таких, например, как выход реек топливных насосов высокого давления, напряжение и ток тягового генератора);
- ввод в вычислительную часть частотных сигналов, т. е. сигналов, характеризующих частоту вращения коленчатого вала дизеля n;
- ввод в вычислительную часть дискретных (релейных) гальванически развязанных сигналов (КВ, МР1 … МР4, РУ5, ОМ1 … ОМ6 и др), характеризующих состояние объекта регулирования; дискретные сигналы формируются по принципу «есть – нет» и используются для определения признака включения или не включения какого-либо устройства или аппарата;
- передача от вычислительного устройства к объекту регулирования гальванические развязанных импульсных управляющих сигналов (ШИМ1, ШИМ2), используемых для плавного регулирования тока возбуждения тягового генератора и стартер-генератора;
- передача от вычислительного устройства к объекту регулирования дискретных (релейных) управляющих сигналов (ВШ1, ВШ2, РМ1), используемых для включения или отключения контакторов и реле электрической схемы тепловоза.
При работе с высоковольтными аналоговыми электрическими сигналами (например, напряжение и ток тягового генератора тепловоза) их гальваническая развязка, а также, при необходимости, первичное масштабирование (пропорциональное понижение уровня) сигнала осуществляется специальными датчиками (ДН, ДТ). При измерении неэлектрических величин (например, выход реек топливных насосов высокого давления z) датчик осуществляет преобразование физической природы сигнала.
Логика работы системы УСТА, т. е. порядок ее взаимодействия с объектом регулирования, полностью определяется управляющей программой вычислительной части системы, в основу которой положены закономерности ПИД-регулятора. Управляющей программой называется циклически замкнутая, непрерывно выполняемая вычислительной частью системы последовательность операций, обеспечивающая определенный порядок взаимодействия микропроцессорной системы регулирования с объектом регулирования.
|
|

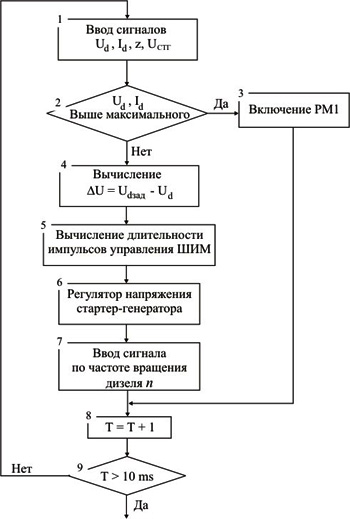
Основная программа состоит из бесконечного цикла. Перед входом в цикл проходит блок инициализации. В этом блоке производится начальная установка режимов работы самого микроконтроллера и настройка периферийных устройств на плате процессора. Основная часть алгоритма, представляющая собой собственно регулятор напряжения тягового генератора и регулированию напряжения стартер – генератора, выполняется каждые 10 мс.
По истечении этого времени выполнение алгоритма работы происходит по другому пути, где определяется позиция контроллера машиниста, состояние электрической схемы тепловоза и, в зависимости от состояния электрической схемы и уровня напряжения тягового генератора, выполняется управление электропневматическими вентилями контакторов ослабления возбуждения ВШ1 и ВШ2 тяговых электродвигателей. Следующим шагом в выполнении алгоритма управления производится оценка свободной мощности дизеля на основании данных о положении реек топливных насосов высокого давления и фактической частоты вращения коленчатого вала. Уровень свободной мощности дизеля определяет заданное значение мощности тягового генератора. Прежде чем вычислить заданное значение напряжения тягового генератора и темп его изменения в вычислительном устройстве определяется наличие или отсутствие боксования. Здесь же вычисляются максимально допустимые значения напряжения и тока тягового генератора. Заданные значения напряжения тягового генератора и темпа его изменения, а также максимальные значения тока и напряжения передаются в регулятор напряжения тягового генератора. Эта часть алгоритма управления повторяется каждые 100 мс.
|
Регулятор напряжения тягового генератора (для тепловоза 2ТЭ116 – напряжения Ud на выходе ВУ), образован блоками 1 … 5. В блоке 1 осуществляется ввод информации о значениях сигналов, характеризующих состояние дизель-генераторной установки. В блоке 2 проверяется, не является ли текущий режим аварийным, т. е. не превышены ли предельные значения тока Id и напряжения Ud на выходе ВУ (соответственно 7100 А и 850 В). Если такое превышение обнаруживается, дискретный выход РМ1 устанавливается равным 1 и получает питание катушка реле РМ1. Последнее, включившись, осуществляет сброс нагрузки тягового генератора с отключением контакторов П1 … П6, ВВ, КВ и последующей сборкой схемы возбуждения тягового генератора в режиме холостого хода. Если допустимые значения тока и напряжения на выходе ВУ не превышены, определяются величина и знак рассогласования ΔU между заданным (Udзад) и измеренным фактическим (Ud) напряжениями на выходе выпрямительной установки, в зависимости от которых далее выбирается направление и вычисляется темп изменения ширины импульсов открытия транзисторов канала 1 модуля «ШИМ», управляющего током возбуждения синхронного возбудителя. В блоке 6 выполняются операции по регулированию напряжения стартер - генератора, которые подробнее будут рассмотрены ниже.
Описанная последовательность операций обеспечивает увеличение тока возбуждения возбудителя при Ud < Udзад и уменьшение его при Ud > Udзад темпом, зависящим от абсолютного значения разности (Udзад - Ud), что позволяет поддерживать напряжение Ud равным Udзад. Поскольку электрические машины (стартер-генератор, синхронный возбудитель, тяговый синхронный генератор) сравнительно быстро реагируют на изменение тока возбуждения, для достижения требуемой точности регулирования напряжения и обеспечения эффективной защиты электрической передачи от аварийных режимов работы эти операции необходимо выполнять достаточно часто. Алгоритм работы УСТА предусматривает выполнение их через каждые 10 мс, т. е. 100 раз в секунду. При наличии такого регулятора управление генератором сводится к изменению величины заданного напряжения Udзад, которая нигде внутри описанного регулятора не определяется и является для него внешней величиной. Если она будет оставаться постоянной во всех режимах работы, регулятор будет поддерживать постоянное напряжение на выходе ВУ во всех режимах работы дизель – генератора. Однако для тепловозного дизель – генератора такое регулирование является неприемлемым.
Как известно, система регулирования напряжения тягового генератора вне зависимости от ее исполнения должна решать следующие основные задачи: формирование гиперболической внешней характеристики генератора, которая, кроме собственно гиперболического участка ограничения мощности, включает также прямолинейные участки ограничения напряжения и тока; использование всей свободной мощности дизеля на тягу; управление контакторами ослабления тока возбуждения тяговых электродвигателей; ликвидация боксования; ограничение мощности генератора при отключении одного из тяговых электродвигателей.
В системе УСТА большинство этих задач решаются изменением величины заданного напряжения Udзад, которая рассчитывается в оставшейся части алгоритма и передается в рассмотренный выше регулятор напряжения тягового генератора. Прежде чем продолжить подробное рассмотрение алгоритма, кратко остановимся на основных принципах решения каждой из перечисленной выше задач.
Формирование внешней характеристики тягового генератора является наиболее сложной задачей, решаемой системой УСТА. На участке ограничения напряжения заданное напряжение остается постоянным и равным максимально допустимому для данной позиции Nкм контроллера, т. е. Udзад = Udmax(Nкм). На участке ограничения тока оно снижается по мере уменьшения сопротивления нагрузки тягового генератора с целью исключения увеличения тока нагрузки тягового генератора выше максимально допустимого Idmax(Nкм) для данной позиции контроллера. На участке ограничения мощности система решает задачу поддержания постоянной мощности генератора, т. е. Рг = Id∙Ud = const. С этой целью в ее алгоритме организован специальный регулятор мощности, входами которого являются величина заданной мощности генератора Ргзад, измеренные фактические значения тока Id и напряжения Ud на выходе выпрямительной установки, а выходом – величина заданного напряжения Udзад. Если фактическая мощность, равная произведению тока Id и напряжения Ud, превосходит заданную (т. е. имеет место перегрузка дизеля), величина Udзад уменьшается, что приводит к уменьшению на-пряжения Ud, а, следовательно, тока Id и мощности Рг.
В противном случае Udзад увеличивается, что приводит к увеличению Рг. Величина заданной мощности определяется различными способами в зависимости результатов измерения или частоты вращения коленчатого вала, или выхода реек топливных насосов высокого давления, или перемещения индуктивного датчика регулятора частоты вращения коленчатого вала дизеля. В этом случае заданная мощность вычисляется как сумма двух составляющих, т. е. Ргзад = Ргсел + DР. Первая из них представляет собой аналог селективной мощности в серийных системах объединенного регулирования дизель-генераторной установки и определяется в зависимости от частоты вращения n коленчатого вала дизеля или в зависимости от позиции контроллера машиниста. Вторая составляющая представляет собой добавку к селективной мощности, обеспечивающую соответствие фактического выхода реек топливных насосов высокого давления дизеля заданному для данной позиции контроллера или же соответствие фактического положения индуктивного датчика регулятора частоты вращения коленчатого вала дизеля (напряжения Uид) его среднему положению.
Поскольку управление силовой установкой тепловоза осуществляется посредством релейной электрической схемы, информация о состоянии реле и контакторов этой схемы, получаемая вычислительной частью системы УСТА с помощью средств ввода дискретных сигналов, чрезвычайно важна для ее корректной работы.
Для измерения частоты вращения коленчатого вала дизеля задействован высоковольтный вход частотного канала. В качестве источника переменного напряжения используется выходное напряжение синхронного возбудителя, которое с помощью трансформатора ТР понижается до 15 … 20 В (при напряжении на выходе возбудиВ). Входной сигнал поступает в модуль Упр. ШИМ, где он преобразуется в гальванически развязанный от внешних цепей сигнал, представляющий собой последовательность прямоугольных однополярных импульсов с амплитудой 5 В. Этот сигнал поступает в модуль ПР, где и определяется частота следования импульсов, пропорциональная частоте вращения ротора синхронного возбудителя, а, следовательно, и частоте вращения коленчатого вала дизеля.
Дискретные управляющие сигналы используются в системе УСТА для управления работой электрических аппаратов схемы тепловоза. Средства вывода этих сигналов представлены в системе модулем ВЫХ выходных ключей. Они используются для управления следующими аппаратами электрической схемы: групповой контактор ВШ1; групповой контактор ВШ2; реле РМ1 - включение реле защиты РУ2 с последующим отключение нагрузки тягового генератора; реле РУ16, обеспечивающее автоматическое переключение возбуждения стартер - генератора с резервного на основное.
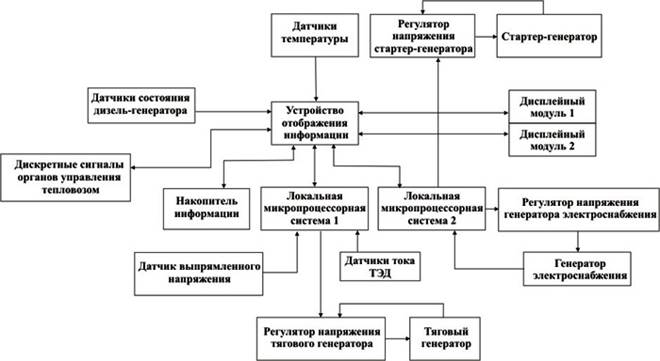
Логическим продолжением микропроцессорных систем управления и регулирования электрической передачей тепловозов (МСКУ-1, АСУ «Локомотив», УСТА), разработанных специалистами ВНИКТИ, система МСУ-Т отличается более совершенной элементной базой. Использование современных научно-технических разработок обеспечивает высокие потребительские качества системы МСУ-Т.
Применение системы МСУ-Т на тепловозе позволило исключить из схемы его управления все промежуточные реле управления и также реле времени. Установка в кабине машиниста дисплейных модулей (ДМ) предоставила возможность отказаться от использования пультовых приборов, за исключением приборов контроля тормозного оборудования.
Теперь, находясь в кабине, локомотивная бригада имеет возможность контролировать на ДМ практически все параметры основных и вспомогательных систем тепловоза. В случае возникновения какой-либо неисправности, а также при несанкционированной работе исполнительного аппарата и выходе за предельно допустимое значение любого из опрашиваемых параметров, на ДМ индицируется аварийно-предупредительное сообщение с указанием неисправности.
Следует отметить, что принятые технические решения позволили максимально автоматизировать процесс управления тепловозом, но, тем не менее, первоначальное задающее управляющее воздействие по изменению режима его работы всегда инициируется машинистом.
На тепловозе ТЭП70БС система МСУ-Т выполняет большой перечень функций. В частности, она бесконтактно управляет электрической схемой тепловоза во всех режимах его работы (т. е. действием исполнительных аппаратов система управляет непосредственно с помощью электронных транзисторных ключей, а все промежуточные реле исключены из электрической схемы). Пуск и остановка дизеля осуществляются по команде машиниста.
Система отслеживает все временные интервалы, которые требуются для пуска дизеля. Его пуск блокируется при включенном валоповоротном механизме, отсутствии давления масла и топлива до окончания времени предпусковой прокачки маслом, при установке контроллера машиниста на позицию, отличную от нулевой, а также наличии сигнала «Пожар». Дизель автоматически останавливается тогда, когда появляется сигнал «Пожар», отсутствуют сигналы с блокировок газового пожаротушения и реле РДМ4, возникают сигналы о давлении газов в картере и «Аварийный останов дизеля».
Частота вращения коленчатого вала задается в зависимости от позиции контроллера машиниста. Автоматически снимается нагрузка с дизеля при превышении предельно допустимой температуры воды и масла, пропорционально количеству отключенных тяговых двигателей снижается мощность, снимаемая с зажимов тяговой выпрямительной установки. Турбокомпрессор защищается от помпажа при резком сбросе позиций. Это достигается за счет опережающего снижения напряжения на тяговом генераторе по сравнению с уменьшением частоты вращения коленчатого вала дизеля.
Обеспечиваются управление электроснабжением поезда, выдача сигналов задания напряжений в локальные микропроцессорные управления возбуждением тягового и вспомогательного генераторов. Формируются внешние и нагрузочные характеристики тягового генератора в зависимости от частоты вращения коленчатого вала дизеля. Используется вся свободная мощность силовой установки на тягу и электроснабжение поезда за счет включения в контур регулирования мощности координаты положения индуктивного датчика гидромеханического регулятора дизеля.
Автоматически ограничиваются напряжение и ток тягового генератора, тяговых двигателей в режимах тяги и электрического торможения, ведется защита силовых выпрямительных установок от перегрузок. Автоматически выполняются контроль изоляции низковольтных и силовых цепей, сброс нагрузки при нарушении изоляции силовых цепей, управление контакторами ослабления возбуждения тяговых двигателей.
С помощью системы осуществляется управление электрическим торможением тепловоза от контроллера машиниста и от тормозного крана № 000, формирование характеристик электрического тормоза с учетом заданных ограничений, взаимодействие электрического и пневматического тормозов. Автоматически выполняется замещение электрического тормоза пневматическим при неисправностях или низкой эффективности первого. Поддерживается заданная контроллером машиниста скорость движения поезда при электрическом торможении тепловоза. Обеспечивается проверка исправности электрического тормоза на остановленном тепловозе. Также автоматически ведется защита от боксования, юза и срыва шестерни тягового двигателя.
Система регулирует напряжение генератора электроснабжения по заданной характеристике при включенном и выключенном электроснабжении поезда. Она управляет перераспределением мощности между тяговым генератором и генератором электроснабжения поезда на рабочих позициях контроллера машиниста. Автоматически задается режим работы электропривода тормозного компрессора, регулируется напряжение стартер-генератора, работающего в режиме генератора напряжения бортовой сети тепловоза. Обеспечиваются автоматическая защита электрооборудования тепловоза в различных режимах работы, управление автопрогревом дизеля в холодное время года.
Комплект датчиков и преобразователей используется для измерения различных параметров, с помощью которых выполняются управление и регулирование электрической передачи тепловоза, защита дизеля и электрооборудования, диагностика оборудования и отображение информации на экранах ДМ.
Измерительные преобразователи тока и напряжения используются для контроля: токов якорей всех тяговых двигателей, возбуждения тягового генератора, токов на выходе тяговой выпрямительной установки, возбуждения тяговых двигателей в режиме электрического торможения и возбуждения генератора электроснабжения, токов на выходе выпрямительной установки электроснабжения, электродвигателя компрессора, заряда аккумуляторной батареи, прокрутки дизеля; напряжений на выходах тяговой выпрямительной установки и выпрямительной установки электроснабжения, бортовой сети тепловоза, на зажимах аккумуляторной батареи, а также напряжений для определения сопротивления изоляции силовых цепей и цепей управления.
Индуктивные бесконтактные выключатели измеряют частоту вращения коленчатого вала дизеля, ротора турбокомпрессора, вентиляторов 1-го и 2-го контуров охлаждения дизеля. Датчики избыточного давления измеряют давления: масла на входе в дизель и на выходе из него, в системе смазки тормозного компрессора, редуктора гидронасосов и в редукторе вентилятора центрального воздухоснабжения; топлива на входе фильтра тонкой очистки и на входе в топливные насосы высокого давления.
Введение в схему тепловоза ТЭП70БС дополнительной функции обеспечения электроснабжения поезда повлекло за собой существенное изменение силовой схемы по сравнению с серийным тепловозом ТЭП70.