Методические указания по выполнению курсовой работы
Вопрос устойчивости регулируемых систем, к которым в том числе относится электроэнергетическая система, является важнейшим при проектировании и эксплуатации таких систем.
Различают два вида устойчивости статическую и динамическую устойчивость.
Статическая устойчивость — это способность системы работать в нормальном режиме, при котором имеют места малые колебания параметров ее режима, например, сброс или наброс нагрузки. Т.е. если система возвращается в исходное состояние после малых колебаний параметров ее режима работы, то такая система обладает статической устойчивостью. Из сказанного выше, очевидно, что статическая устойчивость любой системы является необходимым условием ее работоспособности (;жизнедеятельности). К сожалению, это условие не является достаточным.
Наряду со статической устойчивостью система должна обладать еще и динамической устойчивостью
Под динамической устойчивостью понимают способность системы возвращаться в исходное состояние после больших колебаний параметров ее режима. Наибольшие колебания параметров режима работы электроэнергетической системы имеют место при коротких замыканиях в сети, поскольку в этом случаи возникают максимальные дисбалансы между мощностью первичного двигателя (турбины) и мощностью, которая отдает в нагрузку (систему). Максимальный дисбаланс имеет место при трехфазном К.З. т.к. в этом случаи сопротивление в месте К.З. равно нулю и вся мощность вырабатывается генератором шунтируется в точке К.З.
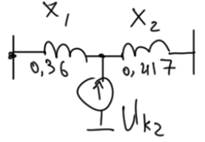
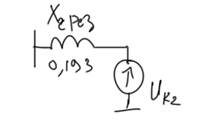
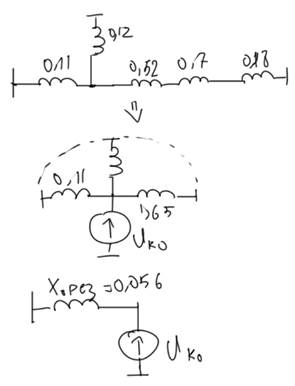
При несимметричных коротких замыканиях, сопротивление в месте поперечной несимметрии не равно нулю и чем оно больше, тем меньше дисбаланс мощностей турбины и мощности нагрузки. На рисунке 1 показаны величины шунтирующих сопротивлений для различных видов К.3
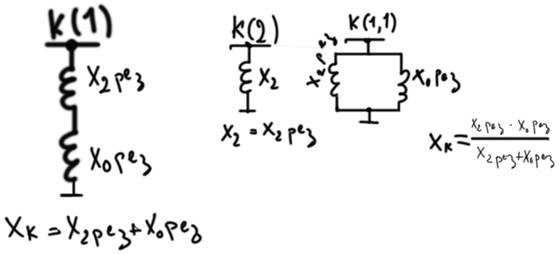 Рис 1. – Величина шунтирующих сопротивлений Хк
Рис 1. – Величина шунтирующих сопротивлений Хк
Х2рез и Х0рез – Результирующие сопротивления токам обратной и нулевой последовательностей.
Как видно из рисунка 1, при не симметричных К.3 наименьший дисбаланс будет при однофазном К.3. К(1), а наибольшие при двухфазном на землю К.3. К(1.1)
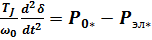
Анализ динамической устойчивости сводится к анализу уравнения движения ротора генератора. Аналитическое выражение для вычисления углового ускорение можно получить из второго закона Ньютона для вращательного движения. Угловое ускорение прямо пропорционально избыточному моменту и обратно пропорционально моменту инерции J.
 (1)
(1)
С другой стороны угловое ускорение — это векторая производная от угла поворота ротора.
 (2)
(2)
Таким образом уравнение движения ротора генератора имеет вид
 (3)
(3)
Электромагнитный момент Мэл и активная мощность, которую генератор отдает в нагрузку связаны простейшим соотношением:
 (4), где
(4), где
ω – угловая частота вращения ротора генератора

Если пренебречь изменением влияния частоты в переходном процессе, то  В относительных единицах
В относительных единицах  т.к. ω*=1
т.к. ω*=1
Тогда уравнение движения ротора генератора будет иметь вид:
 (5)
(5)
Если турбина не регулируется, то PT=P0=const.
В практических расчетах уравнение (5) обычно записывают в виде:
 (6)
(6)
где  – постоянная инерции ротора генератора
– постоянная инерции ротора генератора
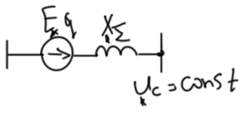
В задании на курсовое проектирование требуется проанализировать динамическую устойчивость удаленного генератора без автоматического регулятора возбуждения (без АРВ), работающего на систему, напряжение на зажимах которой равно постоянной величине (Uc=const), что может быть только в случае, если внутренние сопротивление системы равно нулю Хс=0. Также системы называются системами неограниченной мощности. Динамический анализ допускается провести без учета активных состовляющих сопротивлений сети.
.
Схема замещения такой электропередачи будет иметь вид:
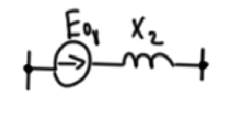
Характеристику мощности простейшей электропередачи легко получить из векторной диаграммы, построенной для нормального установившегося режима.
На положительной плоскости на действительной оси отложим вектор напряжения. Вектор тока отстает от вектора напряжения при индуктивном характере нагрузки на некотрый угол соответствующий номинальному коэффициенту мощности  , например,
, например, 
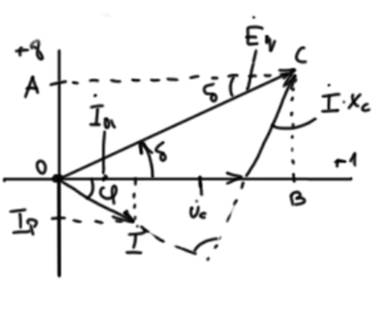
Рис 3. – Векторная диаграмма простейшей электропередачи
Падение напряжения на индуктивном сопротивлении сети ( ) опережает вектор тока
) опережает вектор тока  на
на  .
.
Угол между векторами напряжения на шинах приемной системы  и вектором ЭДС генератора
и вектором ЭДС генератора  обозначим «δ»
обозначим «δ»
Отрезок 
Отрезок  т.е.
т.е.
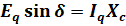 (7)
(7)
Умножим правую и левую часть выражения (7) на 
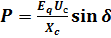 (8)
(8)
Выражение (8) называется характеристикой мощности простейшей электропередачи. Учитывая, что ω=const и генератор не снабжен APB, то  ,
,  ,
,  . Электромагнитная мощность Р, которую генератор отдаст в нагрузку является только функцией угла «δ»
. Электромагнитная мощность Р, которую генератор отдаст в нагрузку является только функцией угла «δ» 
На рисунке 4 приведена характеристика мощности простейшей электропередачи.
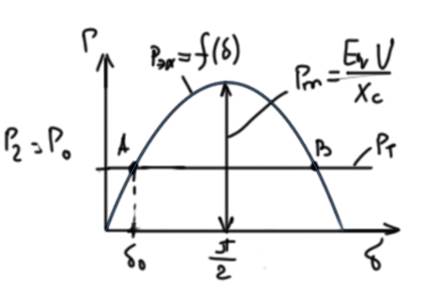
Рис 4. – характеристика мощности простейшей электропередачи
Нанесем на характеристику мощности, характеристику первичного двигателя (турбины). Очевидно, что мощность турбины не зависит от угла «δ», а зависит только от количества рабочего вещества (вода, пар), которое поступает к лопастям турбины в единицу времени.
Для устойчивой работы необходим баланс мощностей подводимой и потребляемой РТ=Рэл Как видно из рисунка 4 такой баланс имеет место в двух точках «А» и «В». Как известно из анализа статической устойчивости, устойчивая работа возможно лишь на восходящей части характеристики мощности в диапазоне углов от 0о до 90о таким образом, рабочей точкой является только точка «А» с координатами Р0 и δ0.
При нарушении баланса мощностей РТ и Рэл вектор ЭДС генератора , который жестко связан с роторам начинает вращаться быстрее, чем вектор направления на шинах системы  ,который вращается в положительном направлении (против часовой стрелки) с угловой скоростью
,который вращается в положительном направлении (против часовой стрелки) с угловой скоростью  . Сказанное выше иллюстрируется рис. 5
. Сказанное выше иллюстрируется рис. 5
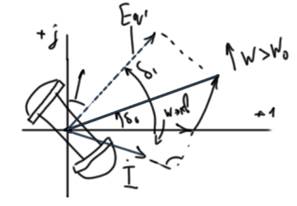
Рис. 5 – изменение угла δ при нарушении баланса мощностей
Как видно из рис. 5 угол «δ» начинает увеличиваться.
Приведем пример выполнения курсовой работы.
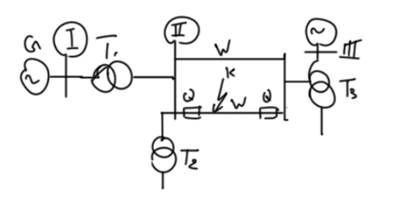
Рис. 6 – расчетная схема электрической системы.
Исходные данные
G: ρном=200 МВА Uном=18 кВ 
T1: Sном=200 МВА UВном=115 кВ Uн ном=18 кВ uк=11%
T2: Sном=63 МВА UВном=115 кВ Uн ном=10,5 кВ uк=12%
T3: Sном=250 МВА UВном=230 кВ Uс ном=121 кВ Uн ном=10,5 кВ Uк В-с=11% Uкв-н=32% UКс-н=20%
W: L=76 км Х1уд=0,41 Ом/км Х0уд=1,34 Ом/км Х0 м уд=0,603 Ом/км
I) Определение параметров замещения электрической системы в нормальном режиме.
Расчеты будем вести в относительной базисной системе единиц. За базисную мощность примем номинальную мощность генератора, тогда относительная базисная мощность тех элементов у которых базисная мощность равна номинальной базисные сопротивления будут равны номинальным величинам.

Определим базисные напряжения на всех 3-х ступенях рис.1


У электрических систем за номинальное напряжение принимается соответствующее среднее напряжение согласно гостированного ряда. Номинальному напряжению 220кВ соответствует среднее напряжение 230кВ Uном с=230 кВ. Тогда 



В схему замещения входят только те элементы сети, по которым протекают токи при КЗ в сети. Токи по обмоткам трансформатора Т2 и по обмотке низшего напряжения АТ (Т3) протекать не будут.
При расчете параметров схемы замещения автотрансформатора, схема замещения которого такая же, как и у трехобмоточного трансформатора, нужно иметь в виду, что у трехобмоточного трансформатора все обмотки имеют магнитную связь, а у автотрансформатора обмотка высшего напряжения и обмотка среднего напряжения имеют еще и гальваническую связь, как это показано на рис. 7
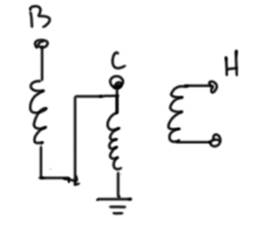
Рис. 7 – схема замещения одной фазы АТ
Поэтому в АТ часть мощности с обмотки высшего напряжения передается на обмотку среднего напряжения гальваническим путем, а часть электромагнитным путем. Данные, которые приводятся в справочной литературе для АТ только направление короткого замыкания Uк В-с приведено к номинальной мощности, а два других Uк с-н и Uк В-н приведено к так называемой типовой мощности Sтип=Sнам*α, где α=(UВ-UС)/ UВ
Поэтому в схеме замещения Рис. 8 для АТ Uк в-н и Uк с-н нужно сскорректировать. 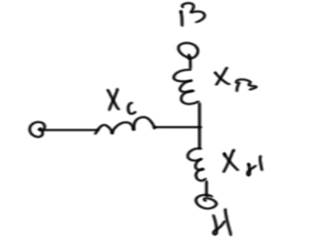
Рис. 8 – схема замещения АТ и трехобмоточного трансформатора

 (9)
(9)



Необходимо отметить, что у трехобмоточных трансформаторов и у АТ индуктивное сопротивление обмоток среднего напряжения получается меньше или отрицательным, поэтому в практических расчетах эти сопротивления полагают равными нулю. На рис. 9 приведена схема замещения нормального режима работы.
 Рис. 9 – схема замещения сети для нормального режима работы
Рис. 9 – схема замещения сети для нормального режима работы
II) Упростим схему замещения

Как следует из векторной диаграммы Рис. 3


III) Построим угловую характеристику мощности в нормальном режиме.


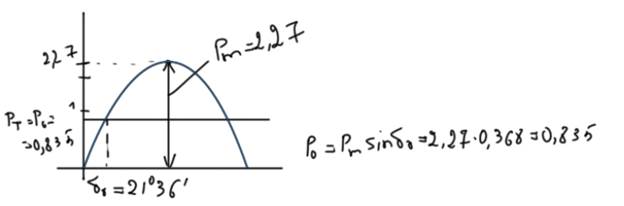 Рис. 10 – угловая характеристика нормального режима
Рис. 10 – угловая характеристика нормального режима
IV) Определение параметров схемы замещения в аварийных режимах
4.1 Схема замещения токам обратной последовательности
ЭДС входит только в схему замещения для токов прямой последовательности. В схему замещения для токов обратной и нулевой последовательности источник ЭДС не входит, но путь тока остается.
Сопротивление токам обратной последовательности для всех элементов, кроме генератора, остается прежним
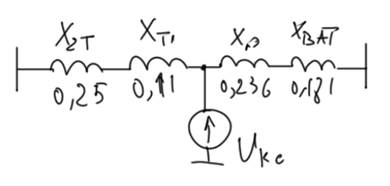
Рис.11 – Схема замещения для токов обратной последовательности
Ток в схеме замещения протекает под действием источника направление в узле поперечной несимметрии. Упростим схему рис. 11


Объединив нейтрали получим результирующее сопротивление.

4.2 Схема замещения токам нулевой последовательности.
Токи нулевой последовательности протекают по контуру связанными с землей, т.е. они замыкаются через обмотку высшего напряжения трансформаторов, которые заземлены. Обмотки низшего напряжения трансформатора Т1 соединены в треугольник, поэтому в статорных обмотках генератора эти токи не протекают, и, следовательно, Хг не входит в схему замещения нулевой последовательности.
Поскольку генератор связан с системой двухцепной линией электропередачи, то в схеме замещения нулевой последовательности учитывают взаимную индукцию этих цепей. Удельное сопротивление ВЛ для токов нулевой последовательности зависит от характера грунта. Как правило Х0уд>Х1уд
Схема замещения токами нулевой последовательности приведена на рис. 12.
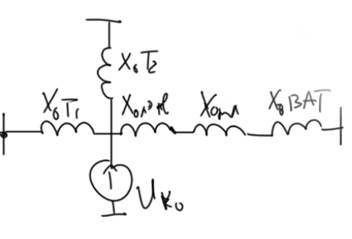
Рис. 12 – Схема замещения токами нулевой последовательности.
Если у трансформатора есть хотя бы одна обмотка, соединенная в треугольник (Δ), то Х0Т=Х1Т



Упростим схему рис. 12

Согласно рис. 1 сопротивление в месте К.З. при К(1,1)

V) Расчет угловой характеристики при двухфазном на землю коротком замыкании К(1,1)
Чтобы построить угловую характеристику необходимо в схеме рис. 9 К.З включить индуктирующее сопротивление Хк=0,43
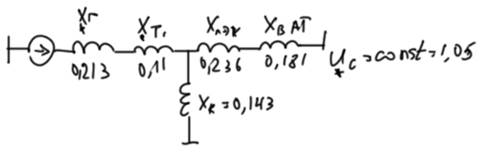
Рис. 13 – схема замещения для К(1,1)
Упростим схему Рис. 13.
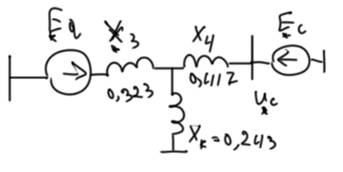
Рис. 14 - Упрощенная схема замещения
В схеме рис. 14 перейдем от звезды к треугольнику

Вся активная мощность от генератора будет перетекать к шинам сети через сопротивление Х12

Угловая характеристика при К(1,1) имеет вид
 т.е.
т.е. 
Очевидно, что  то во всем диапазоне углов от 0 до π мощность первичного двигателя больше мощности, которую генератор отдает в нагрузку. Поэтому ротор генератора все время будет ускоряться и угол «δ» будет расти. Единственным способом обеспечения динамической устойчивости является быстрое отключение поврежденной ЛЭП.
то во всем диапазоне углов от 0 до π мощность первичного двигателя больше мощности, которую генератор отдает в нагрузку. Поэтому ротор генератора все время будет ускоряться и угол «δ» будет расти. Единственным способом обеспечения динамической устойчивости является быстрое отключение поврежденной ЛЭП.
При этом осуществляется переход на послеаварийную угловую характеристику, а амплитудой  т.к. сопротивление ЛЭП возрастет в два раза.
т.к. сопротивление ЛЭП возрастет в два раза.
Сопротивление сети в этом случаи составит:
 ,
,
Тогда 
На рис. 15 приведена характеристика различных режимов работы
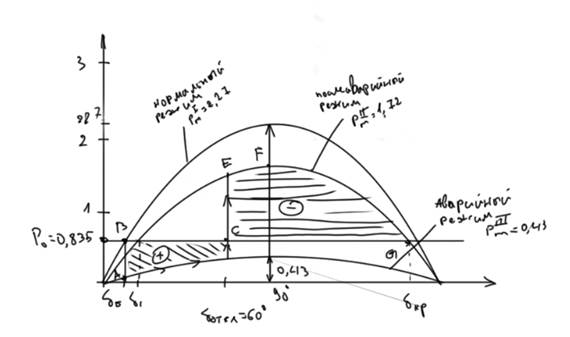 Рис. 14 – Угловая характеристика нормального, аварийного и послеаварийного режимов
Рис. 14 – Угловая характеристика нормального, аварийного и послеаварийного режимов
XI) Определить предельный допустимый угол отклонения поврежденного участка можно с помощью так называемого правила площадей.
Как видно из рис. 14 на участке от δ0 до δоткл. Ротор генератора вращается быстрее чем вектор напряжения приемной системы и угол δ растет
Заштрихованная площадь ABCD называется площадью ускорения. Ее можно определить, взяв соответствующий интервал.
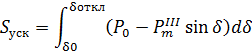
После отключения поврежденного участка мы переходим на послеаварийную угловую характеристику и отдаем в систему большую мощность, чем подводим за счет избыточной кинетической энергии, запасенной на интервале разгона от δ0 до δоткл. На интервале от δоткл до δпр ротор тормозится. Из уравнения:
 (10), где
(10), где 
Можно найти предельно допустимый угол отключения. При этом уже система не будет обладать никаким запасам по динамической устойчивости.
Решение уравнения (10) позволяет получить аналитическую формулу для δоткл.пред
 (11)
(11)
В выражении (11)  ,
, 
В первом слагаемом числителя (11)  нужно выразить в радианах
нужно выразить в радианах

Решение трехфазного К.З. иллюстрируется на рис. 16

Рис. 16 – иллюстрация 3-х фазного К.З.
При расчете предельно допустимого угла отключения при трехфазном коротком замыкании в выражении (11) величину 

XII) На практике необходимо знать время, в течении которого ротор генератора повернется на угол  , что позволит сформировать требования к быстродействию решений защиты и коммутационной аппаратуры.
, что позволит сформировать требования к быстродействию решений защиты и коммутационной аппаратуры.
Для получения зависимости δ=f(t) необходимо решить уравнение зависимости ротора, используя тот или иной метод численного интегрирования (обычно используют метод Эйлера)
Для получения приращений мощности используют зависимости P=f(δ), которые приведены на рис. 14.
Здесь интервал интегрирования разбиваем на равные промежутки Δt=0,05 сек. Приращение угла δ удобно выражать в градусах, поэтому вводим коэффициент

1) Находим угол за первый временной интервал

2) Угол в конце второго интервала

3) Приращение угла на втором и последующих интервалах высчитывается по следующей рекурентной формуле:





Если на к-ом интервале времени происходит отключение повреждённой линии то:

На последующих временных интервалах:




 и т.д.
и т.д.
Как показали расчеты на 6-м временном интервале нам необходимо отключить поврежденную линию.





Данные для построения характеристик δ=f(t) приведены в таб. 1
Таблицы 1 – данные для построения характеристики
| t | 0.05 | 0.1 | 0.15 | 0.2 | 0.25 | 0.3 | |
| δ | 21o31’ | 23o6’ | 23o36’ | 15o | 45о | 57о23' | 71o43’ |
Зависимость δ=f(t) приведена на рис. 17
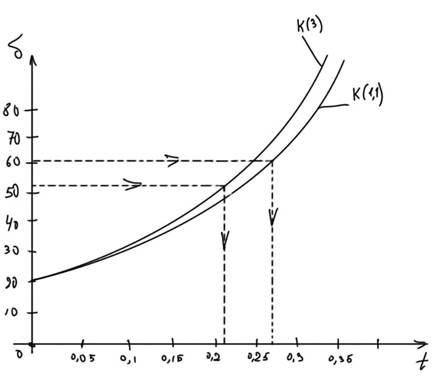
Рис. 17 – зависимость δ=f(t) при К (1,1) и К (3)
При двухфазном К.З. на землю предельно допустимому углу δ=60о соответствует t=0.26 сек.
Чтобы иметь запас по динамической устойчивости порядка 15 – 20%. суммарное время действия релейной защиты и коммутационной аппаратуры должно быть tоткл≤0,2сек
Аналогично можно построить характеристику для 3-х фазного К.З. Следует учесть, что до момента отключения повреждений
 , данные для построения характеристики приведены в таб. 2
, данные для построения характеристики приведены в таб. 2
Таблицы 2 – данные для построения характеристики
| t | 0.05 | 0.1 | 0.15 | 0.2 | 0.25 | 0.3 | |
| δ | 21o36’ | 23o6’ | 28o36’ | 37o21’ | 50о61’ | 63о21' | 75o21’ |
Библиографический список
1. Жданов П. С. Вопросы устойчивости электрических систем / П. С. Жданов – Москва: Энергия, 1979-456 с,: ИЛ.
2. Веников В. А. Переходные электромеханические процессы в электрических системах: учебник для электроэнергетических спец вузов / В. А. Веников – Москва: Высшая школа, 1985-536 с.
3. Кушнерев А. А. Структурное моделирование электроэнергетических систем: учебное пособие / А. А. Кушнерев, А. Н. Алюнов; мин-во образования и науки РФ Вологодский государственный университет – Вологда: ВоГУ, 2017-72 с.: ил
4. Неклепаев Б. Н., Крючков И. П. Электрическая часть электростанций и подстанций: Справочный материал для курсового и дипломного проектирования: учеб. пособие для вузов – 4-е издание прераб. и дои-М,: Энергоатомиздат, 1889, - 608 с., ИЛ