В реальных условиях в позиционных регуляторах изменение выходного сигнала от min до max происходит при различных значениях входного сигнала.
Разность между значениями входной величины в момент изменения выходного сигнала называется зоной нечувствительности.

За счёт разности теплового расширения латуни и инвара размыкается или замыкается контакт регулятора температуры, что приводит ко включения или выключению исполнительного устройства, к которому подключены эти контакты.
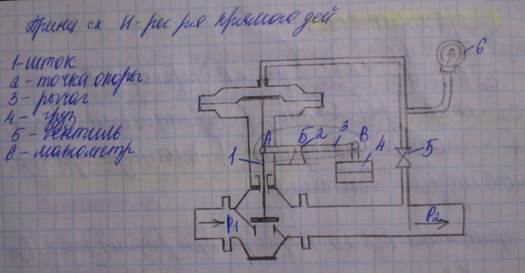
3. Регулятор прямого действия. Характеристики П регулятора. Применение.
Принципиальная схема П - регулятора давления прямого действия

Техническое устройство, изменение выходной величины которого пропорционально изменению входной
Δy= k Δx, называется пропорциональным регулятором, где K- коэффициент усиления регулятора.
Преимущества регулятора:
Простота и пропорциональная зависимость выходной величины от входной.
Недостатки регулятора:
Наличие статической ошибки, ошибку можно уменьшить, увеличивая коэффициент усиления регулятора K, но увеличивать до ∞К нельзя, т.к. САР может выйти в неустойчивое состояние.
Статические характеристики П регулятора:

4. Интегральный регулятор прямого действия. Характеристики И регулятора. Применение.
Интегральным регулятором называется техническое устройство, изменение выходной величины которого пропорционально интегралу изменения входной:
Δy=1/Tи 
где Ти- время интегрирования(является настроечным параметром регулятора).
Принципиальная схема И- регулятора прямого действия:

5. Составление структурной схемы ПИ- регулятора. Закон регулирования. Динамическая характеристики. Применение.
Техническое устройство, изменение выходной величины которого пропорционально как изменению выходной, так и интегралу её изменения, называется ПИ регулятор.
Δy= K Δx + 
Передаточная функция: W(p)= K+ 
Структурная схема ПИ- регулятора:
a) Параллельное соединение звеньев



 X
X


|

 xзад y
xзад y
б) последовательное соединение звеньев




|

|




|
Временные характеристики: 
При подаче на вход регулятора скачкообразное изменение входа, выходная величина в начале возрастает за счёт пропорциональной составляющей регулятор, далее выходная величина начинает изменяется с постоянной скоростью.
ПИ регулятором называется изодромными регуляторами. Под временем изодрама понимают время, в течении которого выходной величины под действием интегральной составляющей удваивает своё значение, полученное за счёт П составляющей.
Достоинства: за счёт И составляющей нет статического ошибки, получаемой за счёт П составляющей регулятора.
Недостатки: сложная конструкция.
6. Составление структурной схемы ПИД- регулятора. Закон регулирования. Динамическая характеристики. Применение.
Техническое устройство, изменение выходной величины которого пропорционально изменению входной, интегралу и скорости изменения входной величины.
Δy= K Δx + +Tд 
Передаточная функция: W(p)= K+  + TдP
+ TдP
Структурная схема ПИД- регулятора:

Дифференциальная часть регулятора прибавляет регулятору быстродействие, поэтому эти регуляторы (ПИД) применяется в объектах, которые обладают инертностью. Это является достоинством.
Недостатком ПИД: сложная конструкция, дорого.
7. Описание пневматического регулятора, его работа. Применение.

Р0-0,14 МПа(давление питания). Оно подаётся в камеру 3 через постоянный дроссель 2. Изменение параметра на выходе преобразователя с помощью заслонки тяги меняет расстояние между соплом и заслонкой, что приводит к увеличению или уменьшению Р1. Если давление З1 подать к ИУ, то это будет простейший регулятор.
8. Описание пневматического регулятора ПР2.5. Уравнение, характеристики. Применение.





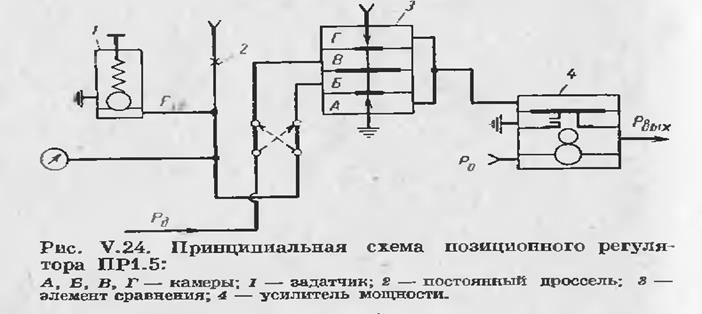
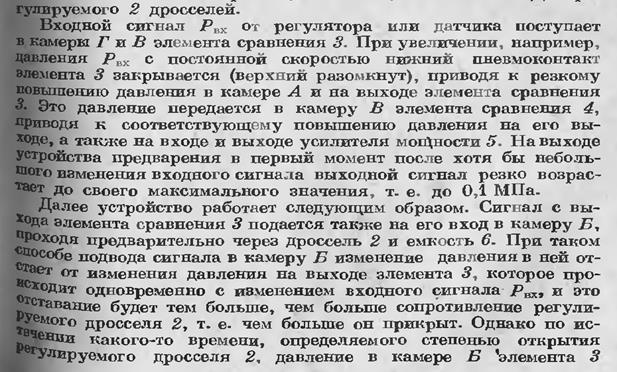
9. Описание пневматического регулятора ПР1.5. Уравнение, характеристики. Применение.



10. Описание пневматического регулятора ПР3.31. Уравнение, характеристики. Применение.

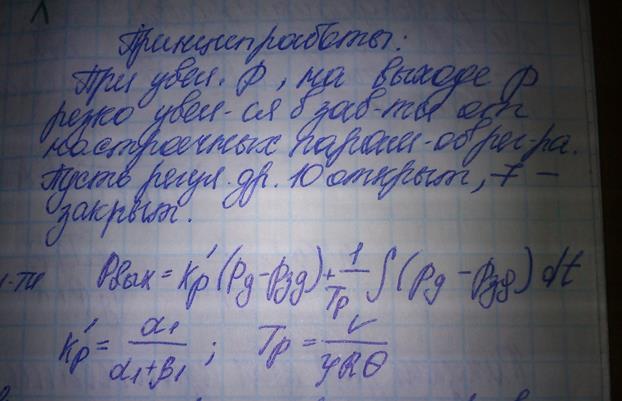
По истечении определенного временем, которое определяется проводимостью регулирующего дросселя 3, выходная величина начнёт изменяться с определённой скоростью. При этом коэффициент усиления регулятора будет изменяться от 0.033 до 1.
Регулируемый дроссель 7 полностью открыт, а 10 регулирует. При этом настроечный параметр Кр измениться от 1 до 50.
Рвых= Кр”(Рд-Рзд)+ 
 dt
dt
Kр”=d2+β2/d2
11. Описание пневматического регулятора ПФ 2.1. Уравнение, характеристики. Применение.

Каждый раз при изменении сигнала на входе на входе устройства предварительного появления сигнала, как бы опережающий входной. Вел опережает больше, чем больше U изменяется P на входе устройства предварения.
Если РВХ – const, => РВХ=РВЫХ


 РВХ , то РВЫХ до 0,1 МПа=> РВХ=РВЫХ
РВХ , то РВЫХ до 0,1 МПа=> РВХ=РВЫХ
РВХ , то РВЫХ до 0,02 МПа=> РВыХ=РВХ


12. Описание измерительной схемы ПВ 10.1Э и её подключение.



13. регулирования технологического параметра. Станция управления ПВ 10-1Э.





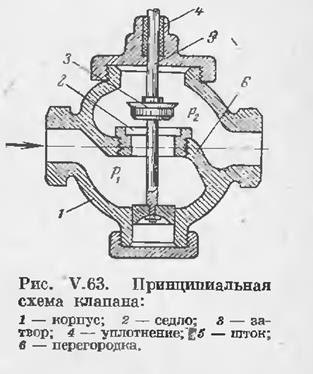
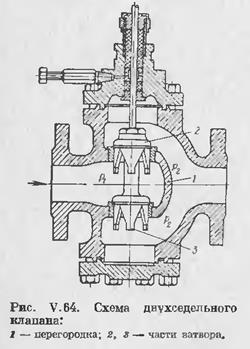
14. Выбор регулирующего клапана, по условию пропускной способности. Виды клапанов.






15. Исполнительный механизм. Характеристики, применение, позицианер.





16. Выбор интервала квантования. Формирование управляющего сигнала в ПЦОС.
17. Составление структурно- алгоритмической структуры САУ с цифровым регулятором.