Как указывалось выше, для работы используется шаговый двигатель российского производства FL28STH32-0956A [13]. Вот некоторые его характеристики:
· Рабочий ток 0,95А;
· Крутящий момент 0,43 кг*см;
· Момент инерции ротора 0,9 г*cм2;
· Вес 0,11 кг.
Для работы мотора необходимо обеспечить ток в 0,95А для этого установлены блоки усиления (рисунок 3.6). Транзистор выбран так, чтобы обеспечить необходимый ток для работы шагового двигателя, а конкретно, если двигатель потребляет 0,95А, а выход микроконтроллера 20мА, то соответственно необходимый коэффициент усиления ≈50, для его обеспечения воспользуемся схемой Дарлингтона. [31-40]
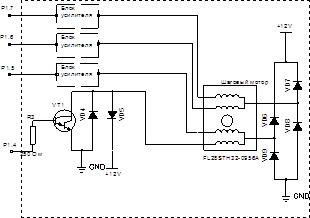
Рисунок 3.6 – Сема управления шаговым мотором
Схема присоединена к 4 портам: с Р1.4 по Р1.7. Каждый порт отвечает за свою обмотку, таким образом, программно будем подавать сигнал на ту или иную обмотку и тем самым будем раскручивать ротор мотора.
Схема управления насосом
Для работы используется насос 2013 14Вт, имеющий отдельное питание от сети 220В, который включается с помощью низковольтного реле (рисунок 3.7). С помощью трубок он будет качать воду в стаканчики.
В схеме используется низковольтное реле российского производства РС4.524.315 [21] работающее от напряжения 4В и срабатывает при 80 мА, для обеспечения таких показателей достаточно внутреннего сопротивления реле.
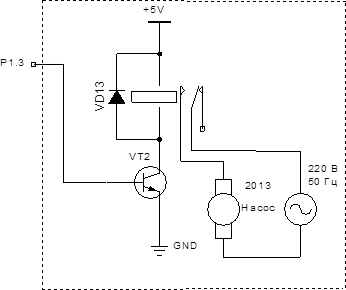
Рисунок 3.7 – Схема управления насосом
Реле срабатывает при открытом транзисторе, который открывается подачей с порта Р1.3 логического нуля. При подаче логического нуля транзистор открывается, и ток проходит через реле, он срабатывает и запускает насос.
Алгоритм работы
Описание блок схемы
Разработку программного обеспечения начнём с создания продуманного алгоритма, который приведён в виде блок-схемы (Приложение Б). [47, 48, 49]
Первым функциональным действием аппарата будет подсчет наполненных стаканчиков, для этого введём специальную переменную, в которую в начале работы обнулим.
Следующим действием будет проверка на наличие достаточного количества воды в баке. Для этого микроконтроллером будет опрошен фотодиодный датчик, и если окажется, что он перекрыт поплавком, то значит, уровень воды маловат и требуется долить воды в бак. Информировать пользователя о недостатке воды будет светодиод, который будет мигать. Это будет происходить за счет того, что микроконтроллер будет попеременно подавать сигнал на включение и выключение, через порт, к которому присоединён светодиод.
Если уровень воды достаточен, включим светодиод индикации уровня воды, подав сигнал на порт, к которому присоединен светодиод.
Далее проверяем, что имеются пустые стаканчики, для этого проверяем специальную переменную, которая считает количество заполненных стаканчиков. Если мы заполнили водой все стаканчики, то завершаем работу аппарата. А если все же остались пустые стаканчики, то работа аппарата продолжается.
Для позиционирования следующего стаканчика необходимо повернуть платформу, на которой они установлены. Это делается с помощью шагового мотора, который проворачивает насколько оборотов ротора и с помощь червячно-реечного механизма поворачивает платформу на определенный угол.
Когда мы знаем, что стаканчик находиться под краном, запускаем насос. Для этого микроконтроллер подаёт сигнал на соответствующий порт и выжидает некоторое время, достаточное для заполнения стаканчика водой. Когда время выходит мотор выключается.
Далее для удобства выжидается набольшая пауза, и аппарат переходит в режим заполнения следующего стаканчика.