Раздел 2 Автоматическое регулирование и регуляторы
Тема 2.1 Основы теории автоматического регулирования.
Основные сведения об автоматических системах регулирования (АСР); характеристики АСР и их элементов
Объекты регулирования: классификация, характеристики, свойства
Основные сведения об автоматических системах регулирования (АСР); характеристики АСР и их элементов
В основе построения систем автоматического регулирования (САР) лежат некоторые общие фундаментальные принципы управления, определяющие, каким образом осуществляется увязка алгоритмов функционирования и управления (регулирования) с фактическим функционированием или причинами, вызывающими отклонение функционирования от заданного. Принцип регулирования определяет способ формирования управляющего воздействия в САР.
В простейшем случае регулирование (управление) осуществляется на основе заранее известных заданий регулирования (алгоритм управления). Этот принцип можно называть как принцип разомкнутого регулирования. Сущность принципа состоит в том, что алгоритм управления вырабатывается только на основе заданного алгоритма функционирования и не контролируется другими факторами – возмущениями или управляемыми (выходными) координатами процесса (рис. 1).

Рисунок 1- Структурная схема разомкнутой САР
В разомкнутой цепочке воздействие передается от входного элемента (задатчика алгоритма управления и управляющего устройства) к выходному элементу (объект управления). Близость Y и X зад в разомкнутых системах обеспечивается только конструкцией и подбором физических закономерностей, действующих во всех элементах.
Когда возмущающие воздействия (G, F) велики, разомкнутая цепь не обеспечивает требуемой точности выполнения алгоритма функционирования. Несмотря на очевидные недостатки, этот принцип используют очень широко. Элементы, представляемые разомкнутой цепью, входят в состав любой системы, поэтому принцип представляется настолько, что его не всегда выделяют как один из фундаментальных принципов.
При регулировании по отклонению регулируемой величины от заданного значения (принцип Ползунова-Уатта) управляющие воздействия возникают вследствие отклонения регулируемой величины (Y) от заданного значения, передающегося на вход системы по цепи обратной связи. В системах регулирования по отклонению контролируется прямо регулируемая величина (Y) и алгоритм функционирования обеспечивается без измерения возмущений. Это дает возможность вырабатывать управляющие воздействия независимо от причины, вызывающей изменения регулируемой величины (рис. 2).

Рисунок 2 - Принципиальная и структурная схема САР по отклонению
Схема имеет вид замкнутой цепи, что дало основание назвать осуществляемый в ней принцип принципом регулирования по замкнутому контуру. Алгоритм управления осуществляется по значениям отклонения регулируемой величины от заданных значений, определяемых алгоритмом функционирования V, т.е. U=ΔU=V-Y.
Недостаток регулирования по отклонению – это инерционность процесса регулирования, обусловленная тем, что обычно, проходит определенное время от момента приложенного возмущения к системе до того момента, когда накопится отклонение регулируемой величины, достаточное для воздействия на регулятор.
При регулировании по возмущению (нагрузке) осуществляется измерение возмущения и при отклонении возмущения от некоторого обусловленного значения в системе возникает управляющее воздействие, реализуемое так же, как в системах регулирования отклонений (рис.3).
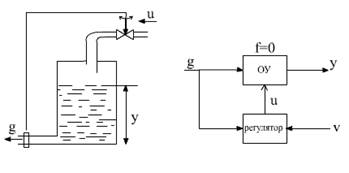
Рисунок 3 - Принципиальная и структурная схема САР по нагрузке
Достоинством регулирования по нагрузке является быстрая реакция системы на изменение нагрузки. Недостаток этого принципа вытекает из того, что процесс регулирования начинается лишь при изменении того возмущения, на измерения которого настроена САР. Другие возмущения вызывающие отклонения регулируемой величины, не будут отрабатываться системой. Кроме того, задача измерения нагрузки всегда не достижима.
Иногда с целью увеличения точности и быстроты регулирования применяется в конструировании САР комбинированное регулирование, в котором используются оба принципа – регулирования по отклонению и по возмущению. Такие САР объединяют в себе достоинства, обусловленные обоими принципами регулирования, т.е. быстроту реакции на изменение возмущений и точное регулирование независимо от того, какая причина вызвала отклонение. Функциональная схема принципа комбинированного регулирования приведена на рисунке 4.

Рисунок 4 - Принципиальная и структурная схема комбинированной САР
По принципу построения САР могут быть:
- САР прямого и непрямого действия;
- САР непрерывные и прерывистые;
- статические и астатические САР.
В САР прямого действия воздействие измерительного элемента на регулирующий элемент осуществляется непосредственно без привлечения добавочного источника энергии (рис. 5).
На рисунке представлена САР уровня воды в баке. В этой системе измерительный элемент 2 непосредственно через рычаг АВС воздействует на регулирующий элемент 3. В САР прямого действия энергия, необходимая для процесса регулирования, поступает только вследствие отклонения регулируемого параметра. САР прямого действия могут быть осуществлены только тогда, когда сигнал, создаваемый измерительным элементом, достаточен для непосредственного воздействия на регулирующий элемент.
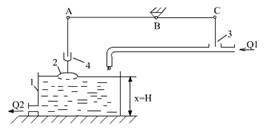
Рисунок 5 - САР уровня воды в баке прямого действия
1-бак (регулируемый объект); 2-поплавок (измерительный элемент); 3-заслонка (регулирующий элемент); 4-задатчик; H -высота уровня воды (регулируемый параметр); Q 1-приток воды в бак; Q2-расход воды из бака
Преимуществом системы является простота конструкции, надежность в работе, не требуются дополнительные источники энергии. Недостатком системы является низкая чувствительность, малая точность регулирования, небольшой коэффициент усиления и ограниченная мощность на выходе.
В САР непрямого действия измерительный элемент воздействует на регулирующий элемент не непосредственно, а через специальные усиливающие элементы, питаемые добавочным источником энергии. Эти элементы вводятся для усиления сигналов, подаваемых измерительным элементом к регулирующему элементу, за счет постороннего источника энергии (рис. 7). На рисунке 7 представлена САР уровня воды в баке непрямого действия. Здесь в качестве добавочной энергии используется источник питания двигателя постоянного тока. В САР непрямого действия энергия, необходимая для процесса регулирования, поступает не только вследствие отклонения регулируемого параметра, но и от добавочного источника питания.
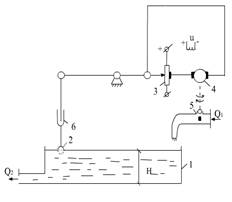
Рисунок 7 - САР уровня воды в баке непрямого действия
1-бак (регулируемый объект); 2-поплавок (измерительный элемент); 3-потенциометр (преобразующий элемент); 4-электродвигатель (исполнительный элемент); 5-заслонка (регулирующий элемент); 6-задатчик
Преимуществом системы является точность, большой коэффициент усиления, удовлетворяющий практическим требованиям чувствительности и точности регулирования. Недостатком системы является сложность конструкции.
Непрерывной называется такая САР, в которой непрерывному изменению регулируемого параметра соответствует непрерывное изменение механических, электрических или других величин во всех элементах системы. Следовательно в ней осуществляется постоянная, непрерывная функциональная связь между элементами. Например, в САР уровня воды в баке любым изменениям уровня воды соответствует перемещению измерительного элемента – поплавка, который воздействует на регулирующий элемент – заслонку. При непрерывном изменении уровня воды регулирующий элемент (заслонка) непрерывно воздействует на регулируемый объект – бак, так, что уровень воды поддерживается постоянным. Большинство подобных САР относится к классу линейных систем.
Прерывистой системой называется такая САР, в которой непрерывное изменение регулируемого параметра соответствует прерывистому изменению воздействия хотя бы в одном из элементов системы. Прерывистую систему можно разделить на две группы: релейные и импульсные.
Рассмотрим релейные системы. В схемах (рис. 8, а) приведено включение электродвигателя через электромагнитного реле. Входная величина Xвх подается на обмотку реле через сопротивление R. Если сопротивление R изменяется, то увеличивается Xвх и при Xвх=Uср замыкает контакт К. В результате Xвых изменяется скачкообразно и принимает свое номинальное значение. При уменьшении значения сопротивления R, значение Xвых сохраняется до тех пор пока Xвх > Uотп; когда Xвх= Uотп контакт К размыкается и Хвых=0. По статической характеристике (рис. 8, б) электромагнитного реле видно, что непрерывному изменению входной величины соответствует скачкообразное появление выходной величины.
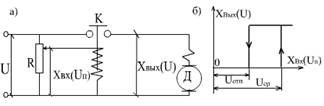
Рисунок 8 – Релейная система
Примером статической САР является САР уровня воды в баке (рис. 5). При постоянном расходе воды Q2 в единицу времени как поплавок, так и заслонка 3 неподвижны. Расход воды Q2 равен количеству поступающей воды Q1. При увелечении расхода воды Q2 уровень воды в баке понижается, поплавок 2 опускается и перемещает заслонку 3 вверх, увеличивая открытие допуска воды Q1. Вследствие этого поступление воды Q1 в единицу времени увеличивается, и уровень воды в баке повышается. Равновесие в системе наступает тогда, когда поступление воды Q1 будет равно ее новому расходу. Следовательно, чем больше расход воды, тем больше должна быть приоткрыта заслонка 3 и тем ниже в состоянии равновесия будет находится поплавок 2. При уменьшении расхода воды заслонка 3 опускается, и поплавок 2 в состоянии равновесия будет находится выше, чем он находился до уменьшения расхода воды Q2.
Таким образом, в системах статического регулирования характерно, что различным установившимся значениям внешних возмущающих воздействий на регулируемый объект соответствуют различные установившиеся значения регулируемого параметра или, иначе говоря, равновесие системы при статическом регулировании имеет место при различных значениях регулируемого параметра, лежащих в заданных заранее пределах. Характеристика статического регулирования имеет вид x=x0 +KQ (рис.9).

Рисунок 9 - Характеристика статического регулирования
Характеристикой статического регулирования называется зависимость регулируемого параметра от нагрузки при различных установившихся режимах.
Разность между каким-либо установившимся значением регулируемого параметра X и его номинальным значением Xном называют абсолютной статической ошибкой: Δ X=X-Xном.
Отношение абсолютной статической ошибки к номинальному значению Xном называют относительной статической ошибкой:
 .
.
Относительную ширину зоны называют неравномерностью системы регулирования δ:
δ =  .
.
Астатической называется такая САР, в которой при различных по величине внешних возмущающих воздействиях на регулируемый объект, отклонение регулируемого параметра от заданного значения по окончании переходного процесса становится равным нулю. Следовательно, величина регулируемого параметра не зависит от изменения нагрузки на регулируемый объект.
Примером такой системы является САР уровня воды в баке показанная на рисунке 7. При постоянном расходе воды Q2 из бака 1 в единицу времени как поплавок 2, так и заслонка 5 неподвижны, так как питание на электродвигатель 4 не подается и в данном случае Q2=Q1. При увеличении расхода воды Q2, уровень ее в баке понижается, поплавок 2 опускается и перемещает вверх ползунок потенциометра 3, электродвигатель получает питание и, вращаясь, приоткрывает заслонку 5, благодаря чему увеличивается доступ воды Q>1 в бак 1. Электродвигатель 4 будет вращаться и передвигать заслонку 5 вверх до тех пор, пока ползунок потенциометра 3 не займет нейтрального положения. В этом случае поплавок 2 займет положение, соответствующее заданному значению уровня воды в баке.
Итак, в установившемся режиме при различных расходах воды Q2 из бака, поплавок 2 всегда будет занимать одно определенное положение, соответствующее заданному значению уровня воды в баке, а заслонка 5 при различных установившихся значениях расхода воды из бака, будет занимать соответственно различные положения.
Таким образом, различным установившимся значениям внешних возмущающих воздействий на регулируемый объект соответствует постоянное значение регулируемого параметра, равное заданному значению, или, иначе говоря, равновесие системы имеет место при единственном заданном значении регулируемого параметра (рис. 10). Регулирующий элемент в конце процесса регулирования может находиться в любом положении, обеспечивающим равновесие системы регулирования.
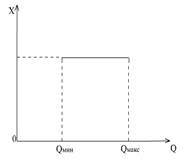
Рисунок 10 - Характеристика астатического регулирования
Астатические САР более точно поддерживают заданное значение регулируемого параметра, но по сравнению с системами статического регулирования имеют более сложное конструктивное исполнение.
Системы поддержания постоянства управляемой величины называют системами стабилизации. Желаемый закон в них имеет вид xo(t)=const, здесь, xo(t) - задание. В системе стабилизации регулируемые параметры сравниваются с эталоном (заданием) и относительно по отклонению D x=xo-x вырабатываются решения. Регулирование по отклонению может уменьшить, но не устранить ошибку. Регулирование, в котором установившаяся ошибка при постоянном заданном значении x o зависит от нагрузки, называют статическим. С целью устранения ошибки в цепь регулирования вводят астатическое звено – интегрирующее звено.
В системах программного управления алгоритм функционирования задан и можно построить специальное устройство – датчик программы, вырабатывающее xo(t). В практике используют два вида систем программного управления: системы с временной программой и системы с пространственной программой.
В следящих системах алгоритм функционирования заранее не известен. Обычно регулируемая величина в таких системах должна воспроизводить изменение некоторого внешнего фактора, и следить за ним. Следящая система может быть выполнена в соответствии с любым фундаментальным принципом управления и будет отличаться от соответствующей системы программного управления тем, что вместо датчика программы в ней будет помещено устройство слежения за изменениями внешнего фактора.
Системы с поиском экстремума показателя качества. В ряде процессов показатель качества или эффективности процесса может быть выражен в каждый момент времени функцией текущих координат системы, и управление можно считать оптимальным, если оно обеспечивает поддержание этого показателя в точке максимума, например настройку радиоприемника на частоту передающей станции по наибольшей громкости приема или по наибольшей яркости свечения индикаторной лампы.
Оптимальное управление применяется в технических системах для повышения эффективности производственных процессов. Задача оптимального управления заключается в следующем: в области допустимых управлений U следует найти такое допустимое управление u, на котором показатель качества достигает экстремального значения.
Системы, автоматически изменяющие значение своих параметров или структур при непредвиденных изменениях внешних условий на основании анализа состояния или поведения системы так, чтобы сохранялось заданное качество ее работы, называют адаптивными системами. Адаптивные системы с изменением значений параметров иногда называют самонастраивающимися, а системы с изменением структуры и алгоритма управления – самоорганизующимися.