3.1 Радиолокационная установка (РЛУ)
Радиолокационные приборы излучатель и приёмник могут быть устроены по супергетеродинной схеме, основанной на двухканальном, амплитудно-импульсном методе, так, как показано на рисунке 3.1. На этом рисунке приведён пример доплеровской радиолокационной установки с непрерывным излучением.
Эхо сигнал от движущейся цели принимается приемниками канала 1 и канала 2. После преобразования в первом канале первичная частота:
fпч = fпр ± Fd1, соответственно во втором канале fпч = fпр ± Fd2, где Fd1 и Fd2 – доплеровские добавки, а fпр – первоначальная частота, задающаяся гетеродинами 1 и 2 каналов.
 |
Сигналы с выходов каналов складываются в сумматоре, где выделяется частота биения Fб = Fдоп = Fd1 – Fd2. Следовательно:
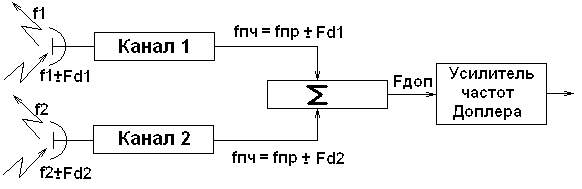 |
Рисунок 3.1 - Функциональная схема радиолокационной установки
, где с – скорость света.
Рассмотрим подробную работу схемы РЛУ.

Рисунок 3.2. – Тракт зондирующего импульса
Тракт зондирующего импульса рис 3.2 предназначен для формирования высокочастотных зондирующих импульсов из маломощного непрерывного сигнала. Непрерывный сигнал с кварцевого генератора блока перестройки частот П1 усиливается усилителем мощности (в блоке П1 задается частота fзад). В смесителях происходит сложение несущей частоты f1 в первом канале и f2 во втором канале с частотой fзад. Затем образованные частоты складываются в блоке сложения мощностей для последующего усиления в пятикаскадной усилительной цепочке. Ферритовый циркулятор служит для переключения РЛУ с приема на передачу и обратно.
 |
Рисунок 3.3. – Тракт эхо сигнала
Тракт эхо сигнала (сигнала поступающего от движущегося автомобиля) рис 3.3. выполнен по супергетеродинной схеме с двойным преобразованием частоты. Отраженные от автомобиля сигналы f1 ± Fd1 и f2 ± Fd2 поступают на фильтры первого и второго каналов через переключатель сигналов и усилитель высоких частот. В этих фильтрах происходит разделение сигнала на два канала, после этого в первых смесителях под действием частоты fзад выделяются промежуточные частоты fпр. Дальше эхо сигнал поступает на вторые смесители где формируется оптимальная ширина пропускания. В сумматоре происходит совмещение двух импульсов и компенсация помех. На выходе сумматора имеем сигнал с частотой Доплера Fдоп.
Данная схема РЛУ свободна от таких недостатков как малочувствительность, потому что в ней отсутствуют тепловые и дробовые шумы, а так же мерцательные шумы, вносимые полупроводниковыми и электронными приборами. Мощность мерцательных шумов обратно пропорциональна частоте, и именно на низких доплеровских частотах шумы кристаллического смесителя могут значительно снизить чувствительность приёмника.
3.2 Микропроцессорная часть
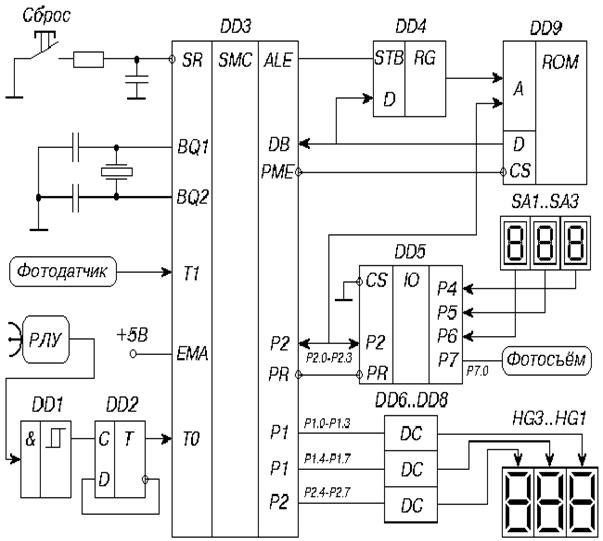
Устройство можно спроектировать с применением однокристального микроконтроллера семейства МК48. Микросхемы семейств МК48 и МК51 получили наибольшее распространение среди микросхем такого класса. Использование микросхемы DD3 К1830ВЕ35 в данном случае - самый экономичный вариант реализации устройства. Функциональная схема устройства изображена на рисунке 3.4. Прикладную программу можно разместить во внешней памяти программ - микросхеме DD9 ПЗУ К556РТ5. Адрес очередной ячейки ПЗУ фиксируется во внешнем регистре DD4. Микроконтроллер содержит на кристалле три 8-разрядных порта. Линии порта P1 и линии P2.4-P2.7 используются для трёхразрядной индикации скорости (км/ч). Для индикации можно использовать тройку светодиодных семисегментных цифровых индикаторов HG1..HG3, например, типа АЛС324А. Индикаторы подключаются к портам микроконтроллера через дешифраторы DD6..DD8 (514ИД1), преобразующие двоично-десятичное содержимое портов в коды управления цифровыми индикаторами.
В данном варианте решения предполагается использование расширителя ввода/вывода DD5 - микросхемы К580ВР43. Расширитель ввода/вывода обеспечивает подключение четырёх дополнительных четырёхразрядных портов P4-P7. Порты P4, P5, P6 используются для ввода в микроконтроллер инверсного двоично-десятичного кода максимально допустимой скорости на данном участке дороги, для этого к ним подключаются три программных переключателя SA1..SA3 типа ПП10-ХВ, на лимбах которых и задаётся максимальная скорость. Линия 0 порта P7 используется для подачи управляющего импульса на аппаратуру фотосъёмки, которая запускается при появлении на линии P7.0 нулевого уровня.
У микроконтроллера задействованы входы T0 и T1. Со входом Т1 связан фотодатчик. Фотоэлемент формирует на входе T1 импульс с нулевым уровнем в тот момент, когда автомобиль проезжает мимо него, это используется для того, чтобы сделать фотоснимок автомобиля именно в нужный момент, если водитель превысил максимально допустимую скорость.
На вход микроконтроллера T0 поступают импульсы с уровнями ТТЛ с частотой Доплера. Для согласования сигнала с приёмного устройства радиолокационного прибора со входом T0 микроконтроллера используется цепочка, состоящая из триггера Шмита DD1 и счётного триггера DD2. Амплитуда напряжения синусоидальной формы с частотой Доплера на выходе усилителя приёмного устройства радиолокационного прибора достигает уровня, достаточного для срабатывания триггера Шмита. Счётный триггер формирует сигнал на тестируемом входе микроконтроллера.
4 Обоснование алгоритма работы устройства
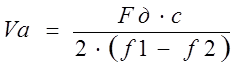
Так как измерение скорости основано на эффекте Доплера, необходимо связать доплеровский сдвиг частоты отражённого сигнала со скоростью автомобиля (в м/с):
для перевода скорости в км/ч умножим её на 3.6:
 (1)
(1)
Несущие частоты излучателей f1 и f2 выбираем равными 200 МГц и 100 МГц соответственно. Подставив в выражение (1) значение скорости света  м/с и несущие частоты f1 и f2, получим:
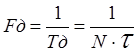
м/с и несущие частоты f1 и f2, получим:  . Частоту Доплера будем измерять методом подсчёта числа импульсов N генератора тактовых импульсов с периодом следования t:
. Частоту Доплера будем измерять методом подсчёта числа импульсов N генератора тактовых импульсов с периодом следования t:
таким образом, искомая скорость автомобиля в км/ч: 
Выбираем t = 0.27 мс, тогда  . Для работы с целыми числами сначала вычислим
. Для работы с целыми числами сначала вычислим 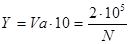 , а затем отбросим младшую цифру, при этом добавлением 5 производится округление.
, а затем отбросим младшую цифру, при этом добавлением 5 производится округление.
Для скорости автомобиля от 11 до 216 км/ч (3... 60 м/с), число N будет находиться в диапазоне от 1851 до 92.
Возвращаясь к функциональной схеме, нулевой уровень будем использовать для измерения частоты Доплера Fд, а при единичном - будем производить вычисление скорости Va и вывод её значения на индикаторы. Далее нужно производить контроль измеренной скорости автомобиля и передавать управление фотосъёмочной аппаратуре, если водитель автомобиля нарушил правила дорожного движения, превысив скорость. При этом фотоснимок будет сделан в тот момент, когда фотодатчик сформирует сигнал на входе T1. Активным является нулевой его уровень, коммутируемый на линию P7.0 для срабатывания фотоаппарата.
5 Разработка управляющей программы
5.1 Схема алгоритма
Схема алгоритма работы управляющей программы изображена на рисунке 5.1. После подачи сигнала сброса SR производится настройка портов P1 и P2 на вывод информации, осуществляется загрузка регистров R1-R0 первого банка регистров общего назначения микроконтроллера (РОН) инверсным двоично-десятичным числом максимально допустимой скорости, набранным на портах P6,P5,P4. После сброса на линии P7.0 (фотосъёмка) окажется неактивный единичный уровень.
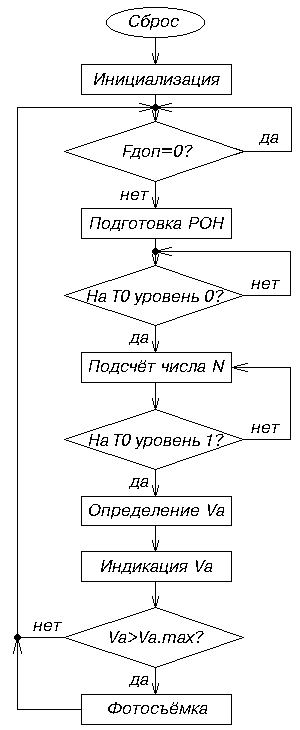
Рисунок 5.1 - Схема алгоритма управляющей программы
Затем микроконтроллер переходит в состояние ожидания импульса на своём входе T0 (см. рисунок 5.1). После его появления осуществляется подготовка РОНов используемого нулевого банка. Далее, дождавшись нулевого уровня импульса, микроконтроллер осуществляет измерение Fдоп , то есть определение числа импульсов “генератора” тактовых импульсов с фиксированным периодом следования. ”Генератор” тактов основан на использовании временной задержки на время t = 0.27 мс. Подсчёт количества таких импульсов проводится в течении всей длительности нулевого уровня T0. Далее, в соответствии с подсчитанным числом N определяется скорость, при этом деление выполняется методом подсчёта количества сложений числа N до превышения суммой (S) числа  . Затем найденная скорость выводится на индикаторы.
. Затем найденная скорость выводится на индикаторы.
Вычисленная на предыдущем этапе работы программы скорость сравнивается с максимально допустимой скоростью. В случае превышения скорости микроконтроллер ждёт появления на входе T1 импульса (нулевого уровня при срабатывании фотодатчика) и коммутирует его на линию P7.0, при этом производится фотосъёмка автомашины.
Если скорость не превышена (или после фотосъёмки), работа программы повторяется с момента ожидания микроконтроллером импульсов на входе T0.
5.2 Пояснения к программе
Листинг управляющей программы приведён в приложении А. Программа организована в виде нескольких подпрограмм как законченных функциональных модулей, это существенно улучшает восприятие текста программы при чтении. Основная программа осуществляет инициализацию, подготовку РОНов, вывод скорости в порты P4,P5,P6 для индикации, сравнение найденной скорости с максимальной путём побайтного сложения значения скорости с инверсным значением максимальной скорости и отслеживания признака переноса. Подпрограмма N осуществляет подсчёт числа N по нулевому уровню. Подпрограмма Y подсчитывает по заданному N число Y на протяжении единичного уровня импульса. Подпрограмме PHOTO передаётся управление, если полученная скорость больше максимально допустимой. Все вычисления производятся с использованием двоично-десятичного представления N(R1,R0) и Y(R6,R5). При этом переменные N и Y имеют двухбайтовый формат, то есть хранятся в двух РОНах. Накопитель S, использующийся при выполнении операции деления, имеет трёхбайтовый формат и хранится в РОНах R4,R3,R2. Сложение числа N в накопителе идёт до тех пор, пока в пятом бите старшего регистра S (R4) не появится 1, что соответствует числу  (если все остальные биты - 0).
(если все остальные биты - 0).
Определим значение константы Z, которая загружается в регистр R7 для реализации фиксированной временной задержки t = 0.27 мс:  мс,
мс,
2.5 мкс - время одного машинного цикла при подключении кварца частоты 6 МГц;
14 - число машинных циклов выполнения команд подпрограммы N, которые надо учесть наряду с основной задержкой в счётчике R7.
Отсюда Z=47=2Fh.
Отметим, что для реализации вычислений задействованы десять РОНов, аккумулятор и одна ячейка стека микроконтроллера. Основные преобразования реализуются в аккумуляторе с использованием команд сложения и десятичной коррекции. Многобайтовые переменные формируются путём последовательного преобразования отдельных байтов.
6 Заключение
Микропроцессоры и микропроцессорные системы являются основой построения электронных устройств с заданными функциональными свойствами. Решающими факторами при проектировании таких устройств являются удобство практической эксплуатации и новый набор - качественных характеристик (более высокое быстродействие, точность, новые функциональные возможности) по сравнению с домикропроцессорным вариантом реализации подобного устройства.
Реализация электронного устройства в данном курсовом проекте - цифрового радара ГИБДД - на однокристальном микроконтроллере серии МК48 К1830ВЕ35 оказалась самым экономичным вариантом.
Такого типа радары широко используются органами ГАИ для измерения и контроля скорости движущихся автомобилей. Полезной возможностью является выбор варианта исполнения цифрового радара. В передвижном варианте необходимыми частями устройства являются РЛУ и микропроцессорная часть. В стационарном варианте в комплект, кроме того, входят фотодатчик и фотосъёмочная аппаратура. В таком варианте изделие функционирует автономно и не требует постоянного вмешательства человека.
Данный курсовой проект позволил сделать серьёзные упражнения в применении знаний, полученных в процессе изучения дисциплины “Микропроцессорные устройства и системы”.
Список литературы
1 ОС ТАСУР 6.1-97. Работы студенческие учебные и выпускные квалификационные. Общие требования и правила оформления.
2 Шарапов А. В. Микропроцессорные устройства и системы. Методические указания к выполнению курсового проекта. - Томск: ТУСУР, 1998. - 39 с.
3 Шарапов А. В. Примеры решения схемотехнических задач. Учебное пособие. - Томск: ТИАСУР, 1994. - 141 с.
4 Шарапов А. В. Цифровая и микропроцессорная техника: Учебное пособие. 2-е изд., перер. и доп. - Томск: Изд-во Том. Ун-та, 1997. - 108 с.
5 Токхайм Р. Микропроцессоры: Курс и упражнения/ Пер. С англ., под ред. В. Н. Грасевича. - М.: Энергоатомиздат, 1988. - 336 с.
6 Белоцерковский Г. Б. Основы радиолокации и радиолокационные устройства. М.: Сов. Радио, 1975. - 336 с.
Приложение А
Листинг управляющей программы
Основная программа:
1 0000 99 00 MAIN: ANL P1,#00H; üПогасить индикаторы и
2 0002 9A 0F ANL P2,#0FH; þподготовить порты к выводу.
3 0004 D5 SEL RB1; ü
4 0005 0E MOVD A,P6; ½
5 0006 03 F0 ADD A,#0F0H; ½
6 0008 A9 MOV R1,A; ½Считать в регистры R0-R1
7 0009 0D MOVD A,P5; ýпервого банка РОНов инверсное
8 000A 47 SWAP A; ½двоично-десятичное значение
9 000B A8 MOV R0,A; ½максимальной скорости.
10 000C 0C MOVD A,P4; ½
11 000D 68 ADD A,R0; ½
12 000E A8 MOV R0,A; ½
13 000F C5 SEL RB0; þ
14 0010 26 10 M1: JNT0 $; Ожидание появления импульса.
15 0012 27 CLR A; ü
16 0013 A8 MOV R0,A; ú
17 0014 A9 MOV R1,A; úПодготовка регистров
18 0015 AA MOV R2,A; ý к вычислениям.
19 0016 AB MOV R3,A; ú
20 0017 AC MOV R4,A; ú
21 0018 AE MOV R6,A; ú
22 0019 BD 05 MOV R5,#05H; þ
23 001B 36 1B JT0 $; Ожидание нулевого уровня T0.
24 001D 14 42 CALL N; Вычисление числа N=(R1,R0).
25 001F 14 53 CALL Y; Вычисление Y»10×Vа=(R6,R5).
26 0021 FD MOV A,R5; ü
27 0022 47 SWAP A; ýПоместить в R5 младшую
28 0023 53 0F ANL A,#0FH; úцифру значения скорости.
29 0025 AD MOV R5,A; þ
30 0026 FE MOV A,R6; ü
31 0027 47 SWAP A; úВ R5 две младшие цифры
32 0028 53 F0 ANL A,#0F0H; ýзначения скорости.
33 002A 6D ADD A,R5; þ
34 002B AD MOV R5,A; Вывести младшие цифры
35 002C 39 OUTL P1,A; скорости на индикаторы.
36 002D FE MOV A,R6; üВыделить в старшем полубайте
37 002E 53 F0 ANL A,#0F0H; þR6 старшую цифру скорости.
38 0030 3A OUTL P2,A; Старшую цифру на индикатор.
39 0031 47 SWAP A; üВ R6 старшая цифра
40 0032 AE MOV R6,A; þзначения скорости.
41 0033 D5 SEL RB1; üСравнить старшие цифры
42 0034 69 ADD A,R1; ýVа и Vа.max и перейти на M0,
43 0035 C5 SEL RB0; úесли Vа>Vа.max.
44 0036 F6 3E JC M0; þ
45 0038 FD MOV A,R5; ü
46 0039 D5 SEL RB1; ú Сравнить младшие цифры47 003A 68 ADD A,R0; ý Vа и Vа.max и перейти на N0,
48 003B C5 SEL RB0; ú если Vа<Vа.max.
49 003C E6 40 JNC N0; þ
50 003E 14 6F M0: CALL PHOTO; Фотосъёмка.
51 0040 04 10 N0: JMP M1; Повторить основную программу.
Подпрограмма измерения Tдоп (вычисления N):
52 0042 28 N: XCH A,R0; ü
53 0043 03 01 ADD A,#01H; ú
54 0045 57 DA A; ú
55 0046 28 XCH A,R0; ýИнкрементирование накопителя
56 0047 29 XCH A,R1; úN=(R1,R0).
57 0048 13 00 ADDC A,#00H; ú
58 004A 57 DA A; ú
59 004B 29 XCH A,R1; þ
60 004C BF 2F MOV R7,#2FH; üВременная задержка 0.17 мс.
61 004E EF 4E DJNZ R7,$; þ
62 0050 26 42 JNT0 N; Пока на T0 нулевой уровень.
63 0052 83 RET; Выход из подпрограммы.
Подпрограмма вычисления Y»10×Vа=(R6,R5).
64 0053 2A Y: XCH A,R2; ü
65 0054 68 ADD A,R0; ú
66 0055 57 DA A; ú
67 0056 2A XCH A,R2; úФормирование S в двоично-
68 0057 2B XCH A,R3; ýдесятичном накопителе
69 0058 79 ADDC A,R1; ú(R4,R3,R2).
70 0059 57 DA A; ú
71 005A 2B XCH A,R3; ú
72 005B 2C XCH A,R4; ú
73 005C 13 00 ADDC A,#00H; ú
74 005E 57 DA A; ú
75 005F B2 6E JB5 M2; úЗакончить сложение N c S,
76 0061 2C XCH A,R4; þесли S>=200000.
77 0062 2D XCH A,R5; ü
78 0063 03 01 ADD A,#01H; ú
79 0065 57 DA A; ú
80 0066 2D XCH A,R5; úФормирование Y в двоично-
81 0067 2E XCH A,R6; ýдесятичном накопителе
82 0068 13 00 ADDC A,#00H; ú(R6,R5)
83 006A 57 DA A; ú
84 006B 2E XCH A,R6; þ
85 006C 04 53 JMP Y; Продолжить вычисление Y.
86 006E 83 M2: RET; Выход из подпрограммы.
Подпрограмма управления фотосъёмкой:
87 006F 56 6F PHOTO: JT1 $; Ожидание импульса фотодатчика.
88 0071 23 FE MOV A,#FEH; üВывод 0 в линию P7.0.
89 0073 9F ANLD P7,A; þ
90 0074 46 74 JNT1 $; Ожидание конца импульса.
91 0076 23 01 MOV A,#01H; üВывод 1 в линию P7.0.
92 0078 8F ORLD P7,A; þ
93 0079 83 RET; Выход из подпрограммы.
Приложение Б
Карта прошивки памяти программ
0: 1: 2: 3: 4: 5: 6: 7: 8: 9: A: B: C: D: E: F:
0000: 99 00 9A 0F D5 0E 03 F0 A9 0D 47 A8 0C 68 A8 C5
0010: 26 10 27 A8 A9 AA AB AC AE BD 05 36 1B 14 42 14
0020: 53 FD 47 53 0F AD FE 47 53 F0 6D AD 39 FE 53 F0
0030: 3A 47 AE D5 69 C5 F6 3E FD D5 68 C5 E6 40 14 6F
0040: 04 10 28 03 01 57 28 29 13 00 57 29 BF 2F EF 4E
0050: 26 42 83 2A 68 57 2A 2B 79 57 2B 2C 13 00 57 B2
0060: 6E 2C 2D 03 01 57 2D 2E 13 00 57 2E 04 53 83 56
0070: 6F 23 FE 9F 46 74 23 01 8F 83 FF FF FF FF FF FF
0080: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0090: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00A0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00B0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00C0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00D0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00E0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00F0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
| |||||||||||||||||
| ФЭТ КП.XXXXXX.007 Э3 | |||||||||||||||||
| МИКРОКОНТРОЛЛЕР Схема электрическая Принципиальная | Лист | Масса | Масшт | ||||||||||||||
| Лист | №докум | Подпись | Дата | ||||||||||||||
| Разработ. | Ощепков | ||||||||||||||||
| Проверил. | Шевелев | ||||||||||||||||
| Т. контр. | Лист | Листов 1 | |||||||||||||||
| ТУСУР ФЭТ ПрЭ гр.367-3 | |||||||||||||||||
| Н.контр. | |||||||||||||||||
| Утв. | |||||||||||||||||
| Поз. Обозначен | Наименование | Кол. | Примечание | ||||||||||||||
| Резонатор кварцевый | |||||||||||||||||
| BQ1 | РК-160МА-14БП-12000кГц-В ОД 0.338.003 ТУ | ||||||||||||||||
| Конденсатор | |||||||||||||||||
| C1, C2, C3 | К73-24-100В-0.68нФ±10% ГОСТ 5.623-70 | ||||||||||||||||
| Резистор | |||||||||||||||||
| R1 | МЛТ-0.125-15кОм±1.0%ОЖО.467.404 ТУ | ||||||||||||||||
| Микросхемы | |||||||||||||||||
| DD1 | K555ТЛ1 5К 1,673,006ТУ11 | ||||||||||||||||
| DD2 | К555ТМ2 6К 0,348,006ТУ14 | ||||||||||||||||
| DD3 | К1830ВЕ35 8П 0,375,006ТУ18 | ||||||||||||||||
| DD4 | К580ИР82 4В 0,244,006ТУ55 | ||||||||||||||||
| DD5 | К580ВР43 3М 2,345,005ТУ32 | ||||||||||||||||
| DD6 – DD8 | К514ИД1 6К 0,478,006ТУ47 | ||||||||||||||||
| DD9 | К556РТ5 3Р 1,394,006ТУ99 | ||||||||||||||||
| Индикаторы | |||||||||||||||||
| HG1 - HG3 | АЛС324А аА 0,336367ТУ | ||||||||||||||||
| Вилки | |||||||||||||||||
| XS1 – XS3 | ОНП – КГ – 26 – 64/73xВ 0.324.027ТУ | ||||||||||||||||
| ФЭТ КП.XXXXXX.007 ПЭ3 | |||||||||||||||||
| Лист | №докум. | Подп. | Дата | ||||||||||||||
| Разработ. | Ощепков | МИКРОКОНТРОЛЛЕР перечень элементов | Лиcт | Лист | Листов | ||||||||||||
| Провер. | Шевелев | ||||||||||||||||
| Т.контр. | ТУСУР ФЭТ ПрЭ гр.367-3 | ||||||||||||||||
| Н.контр. | |||||||||||||||||
| Утв. | |||||||||||||||||