Торможение противовключением имеет место когда поле статора и ротор вращаются в противоположных друг другу направлениях. Данная ситуация может быть реализована двумя способами:
во время вращения ротора АД путем изменения порядка чередования фаз (что достигается коммутацией двух фаз статора АД, как это показано на рис. 4.7: замкнут либо контактор КМ 1, либо – КМ 2) изменяется направление вращения поля статора;
ротор АД под действием момента нагрузки вращается в сторону, противоположную той, в которую он вращался бы без нагрузки (тормозной спуск).
Механические характеристики АД в режиме торможения противовключением путем изменения порядка чередования фаз и в режиме тормозного спуска в координатах  приведены на рис. 4.4, а в координатах
приведены на рис. 4.4, а в координатах  - на рис. 4.5 (участки 3 и 3’). При этом на рис. 4.4 переключение из двигательного режима работы АД в режим торможения противовключением путем изменения порядка чередования фаз соответствует переходу из точки а в точку б.
- на рис. 4.5 (участки 3 и 3’). При этом на рис. 4.4 переключение из двигательного режима работы АД в режим торможения противовключением путем изменения порядка чередования фаз соответствует переходу из точки а в точку б.

|
Рис. 4.7. Схема включения АД в режим торможения противовключением путем изменения порядка чередования фаз.
Динамическое торможение
Данный вид торможения осуществляется путем отключения обмотки статора АД от переменного тока и подключения двух фаз данной обмотки к источнику постоянного тока. Один из вариантов схему включения АД для динамического торможения с независимым возбуждением показан на рис. 4.8.
|
Рис. 4.8. Схема включения АД для динамического торможения с независимым возбуждением
При выключенном контакторе КМ 1 и включенном контакторе КМ 2 в обмотке статора протекает постоянный ток  , который создает неподвижное магнитное поле. Вследствие вращения ротора это поле будет индуктировать в обмотке ротора э. д. с., частота которой пропорциональна угловой скорости вращения ротора
, который создает неподвижное магнитное поле. Вследствие вращения ротора это поле будет индуктировать в обмотке ротора э. д. с., частота которой пропорциональна угловой скорости вращения ротора  . Эта э. д. с., в свою очередь, вызовет появление тока в короткозамкнутой обмотке ротора. Взаимодействие тока ротора с неподвижным магнитным полем статора приводит к возникновению тормозного момента. При этом механическая энергия, поступающая на вал двигателя, преобразуется в электрическую, а последняя рассеивается в виде тепла в сопротивлениях цепи ротора. Механические характеристики АД в режиме динамического торможения с независимым возбуждением при различных значениях тормозных токов в обмотках статора приведены на рис. 4.9.
. Эта э. д. с., в свою очередь, вызовет появление тока в короткозамкнутой обмотке ротора. Взаимодействие тока ротора с неподвижным магнитным полем статора приводит к возникновению тормозного момента. При этом механическая энергия, поступающая на вал двигателя, преобразуется в электрическую, а последняя рассеивается в виде тепла в сопротивлениях цепи ротора. Механические характеристики АД в режиме динамического торможения с независимым возбуждением при различных значениях тормозных токов в обмотках статора приведены на рис. 4.9.
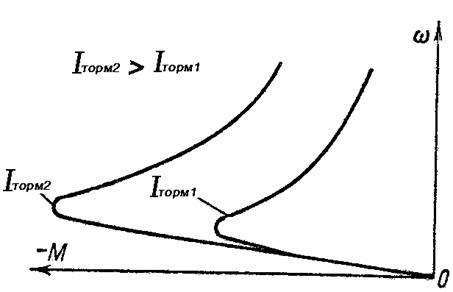
Рис. 4.9. Механическая характеристика АД в режиме динамического торможения с независимым возбуждением
В режиме динамического торможения с независимым возбуждением скорость вращения поля статора  . Поэтому в первом приближении форма механической характеристики может быть получена путем смещения части, соответствующей генераторному режиму АД, вниз до уровня синхронной скорости .
. Поэтому в первом приближении форма механической характеристики может быть получена путем смещения части, соответствующей генераторному режиму АД, вниз до уровня синхронной скорости .
Режимы работы АМ
Режимы работы асинхронных двигателей.
Стандартные асинхронные двигатели предназначены для работы в продолжительном режиме работы (условное обозначение S1), при котором нагрузка, приложенная к валу и условия хлаждения двигателя практически постоянны в промежутке времени, достаточном для нагрева двигателя до установившейся температуры. Правильный расчет усредненных величин КПД и коэффициента мощности особенно важен при выборе геометрических размеров, расчета потерь, нагрева и охлаждения, и выборе установленной мощности стандартных двигателей1, применяемых для работы в кратковременных и повторно-кратковременных режимах.
Для асинхронных двигателей совокупность кратковременных, повторно-кратковременных и перемежающихся режимов работы подразделяется на 7 групп с условными обозначениями S2…S8. Кратковременный режим (S2), режим при, котором двигатель не успевает достигнуть номинальной температуры нагрева частей за время работы при постоянной нагрузке, и успевает охладиться до температуры окружающей среды за время пауз. Повторно-кратковременный режим (S3), характерен для условий работы, при котором продолжительность цикла (10 мин) намного больше времени пуска (т.е. переходной процесс при пуске не влияет на нагрев двигателя и не учитываются). Продолжительность рабочего времени в течении цикла, задается в процентах от времени цикла 5%, 25%, 40% и 60%. В режимах (S4), в отличие от (S3), продолжительность цикла настолько мала, что процессы, происходящие во время пуска (увеличение потерь из за многократного превышения величин пусковых токов над номинальным), оказывают непосредственное влияние на нагрев машины. Длительность цикла, в этом случае, определяется
продолжительностью рабочего времени в процентах от времени цикла и числом включений в час. Поскольку характер переходного процесса во многом определяется динамической нагрузкой на валу, дополнительно задается допускаемый коэффициент инерции (отношение суммы
моментов инерции ротора и приведенного к скорости вращения ротора,
1 Режим работы, для которого предназначен двигатель, указывается на табличке паспортной, прикрепленной на станине. Применение чугунных вентиляторов, независимых от скорости ращения ротора вентиляционных устройств, способствует расширению назначения двигателя, с точки зрения режимов работы.
Режимы, при которых в конце каждого цикла предусмотрено электрическое торможение вигателя обозначаются (S5). Продолжительности включения в этом случае, рассчитывается с учетом времени электрического торможения. Перемежающийся режим (S6) повторяет условия работы режима (S3) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения. Учет пусковых потерь на нагрев двигателя не роизводится. Перемежающийся режим (S7) повторяет условия работы режима (S4) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения. Перемежающийся режим (S8) повторяет условия работы режима (S7) с учетом того что, в этом режиме допускается работа двигателя на нескольких разных скоростях вращения с разными величинами нагрузки на валу.
Особенности определения установленной мощности в кратковременном (S2) и повторно-кратковременном режиме эксплуатации (S3, S6) В кратковременном (S2) и повторно-кратковременных режимах эксплуатации (S3, S6) электродвигатели могут работать с большей
установленной мощностью, чем в длительном режиме работы (S1). Возможное значение величины превышения мощности рекомендуется определять из условия сохранения перегрузочной способности асинхронного двигателя по максимальному моменту в пределах:
При больших числах включения и больших маховых массах определение мощности рекомендуется производить исходя из:
1. относительной продолжительности включения;
2. частоты включения;
3. величины внешнего момента инерции;
4. нагрузочной диаграммы привода;
5. типа торможения.