Тема занятия: СИСТЕМА СХОДЯЩИХСЯ СИЛ
Приведение системы сходящихся сил к равнодействующей
На материальные тела могут действовать различные системы сил - сходящихся, параллельных, произвольно расположенных на плоскости или в пространстве. Одной из наиболее простых является система сходящихся сил.
Задание: 1. Выпишите определение и теорему Система сходящихся сил
Что называется проекцией силы на плоскость и приведите примеры
Законспектируйте аналитический метод определения модуля и направления равнодействующей силы.
Системой сходящихся сил называется система сил,линии действиякоторых пересекаются в одной точке.
Теорема. Система сходящихся сил эквивалентна одной си-ле (равнодействующей), которая равна геометрической сумме всех сил и проходит через точку пересечения их ли-ний действия.
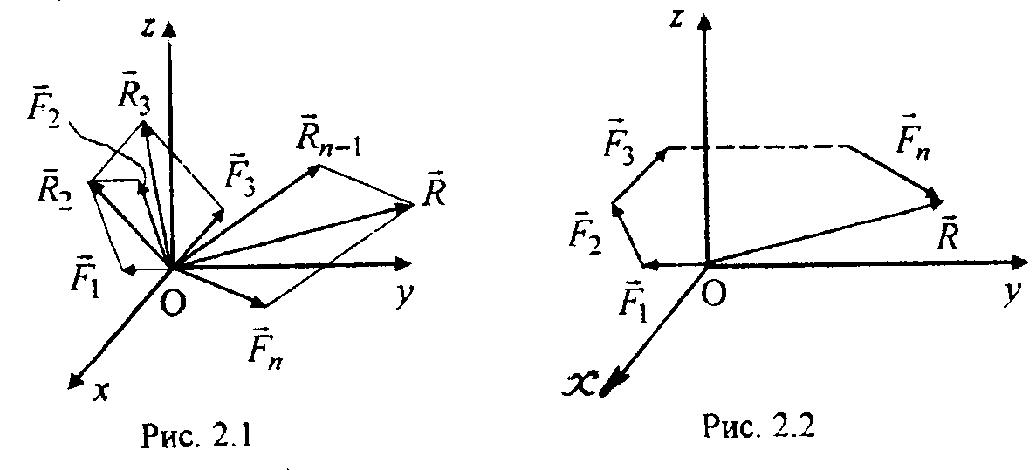
Доказательство. Пусть задана система сходящихся сил F 1, F 2,..., Fn,
приложенных к твердому телу. Согласно следствию из аксиомы III перенесем
силы по линиям их действия в точку пересечения этих линий (рис.2.1).
Складывая силы F 1 и F 2, на основании аксиомы IV получим их равнодей-
ствующую: R 2= F 1+ F 2, индекс равнодействующей соответствует номеру
добавляемой силы. Затем, сложив R 2 с F 3, найдем равнодействующую трех
сил F 1, F 2, F 3:
R 3
= R 2
+ F 3
= F 1+ F 2
+ F 3.
Дойдя, таким образом, до последней силы Fn, получим равнодействую-
щую R всей системы п данных сил:
| n | |||||
| R 3 | = Rn = F 1 | + F 2 | +... + Fn = å Fk. | (2.1) | |
| k =1 |
Построение равнодействующей может быть упрощено, если вместо па-раллелограммов построить силовой многоугольник (рис. 2.2). 0т конца век-
| тора | отложим вектор | , от его конца отложим вектор | и т.д. Получим, | |||||||
| F 1 | F 2 | F 3 | ||||||||
| что вектор, идущий от начала первого | F 1 | к концу последнего | Fn,является | |||||||
равнодействующей R.
Пространственный многоугольник, который получен указанным способом, называется силовым многоугольником. Если для нахождения равно-действующей при помощи силового многоугольника используются правила геометрии, то такой способ нахождения равнодействующей называется геометрическим способом.
Наиболее общим методом определения модуля и направления равно-действующей является аналитический метод.
Вспомним, что проекция силы на ось есть алгебраическая величина, равная произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Если этот угол острый, - проекция по-ложительная, если тупой, - отрицательная, а если сила перпендикулярна оси,
- ее проекция на ось равна нулю. Так, для сил, изображенных на рис.2.3:
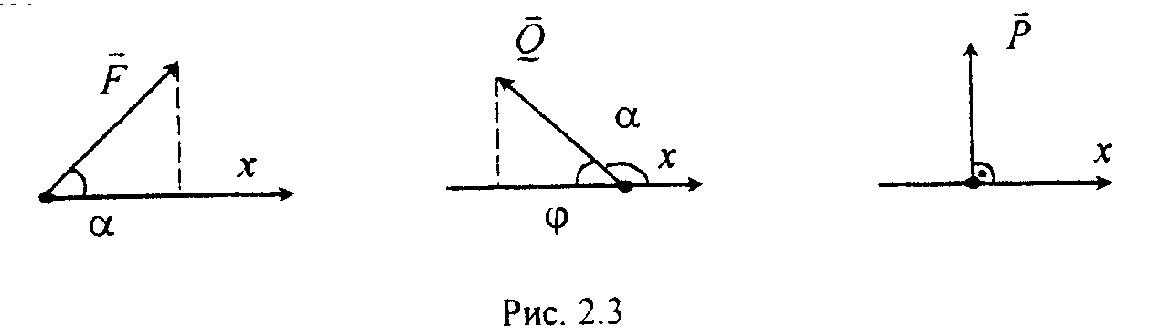
Fx = F cosα; Qx = Q cosα=-Qcos j; Px =0.
Проекцией силы
F
на плоскость О ху называется вектор
Fxy, заключенный
между проекциями начала и конца вектора силы
F
на эту плоскость (рис.
2.4).
Таким образом, в отличие от проекции силы на ось проекция силы на плоскость есть величина векторная, так как она характеризуется не только своим модулем, но и направлением в
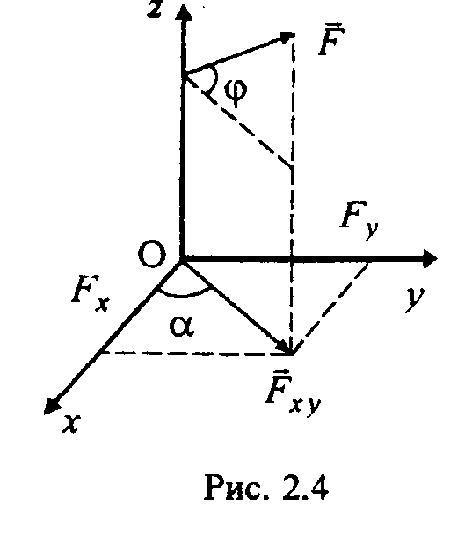
плоскости О ху. Модулю Fx = F cos j, где
j - угол между направлением силы F и её
проекции Fxy.
В некоторых случаях для нахождения проекции силы на ось удобнее найти сначала
ее проекцию на плоскость, в которой расположена эта ось, а затем эту проекцию спроектировать на данную ось. Например, в случае, изображенном на рис. 2.4:
Fx = Fxy cosα= F cos j cosα,
Fy = Fxy sinα= F cos j sinα.
Из курса векторной алгебры известно, что проекция суммы векторов на произвольную ось равна сумме проекций на ту же ось слагаемых векторов. Поместим начало прямоугольной системы координат в точку пересечения линий действия сил (см. рис.2.1), проектируя соотношение (2.1) на оси хуz, получим:
| n | ü | ||
| Rx =å Fkx = F 1 x + F 2 x +...+ Fnx;ï | |||
| k =1 | ï | ||
| n | ï | (2.2) | |
| Ry =å Fky = F 1 y + F 2 y +...+ Fny;ý | |||
| k =1 | ï | ||
| n | ï | ||
| Rz =å Fkz = F 1 z + F 2 z +...+ Fnz,ï | |||
| k =1 | þ | ||
| где Fkx, Fky, Fkz - проекции силы Fk | на указанные оси, а Rx, Ry, Rz - про- |
екции равнодействующей на те же оси.
Проекции равнодействующей системы сходящихся сил на координатные оси равны алгебраическим суммам проекций этих сил на соответствующие оси.
Используя выражения (2.2), можно найти модуль равнодействующей:

| n | n | n | ||||
| Rx 2+ Ry 2+ Rz 2 = | ||||||
| R = | (å Fkx)2 | + (å Fky)2 | + (å Fkz)2. | |||
| k =1 | k =1 | k =1 |

а её направление в системе координат O xy определим по направляющим
косинусам вектора R:
Ù
cos(R, i) = Rx
/ R;
cos(R
Ù, j)
= Ry
/ R;
Ù
cos(R, k)
= Rz
/ R.