РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОВОЙ РАБОТЕ
ПО ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Выполнил студент гр. 1204
Алеев М.А
Принял к.т.н., доцент каф. МиИГ
Филонов Н.В.
Казань 2021
Аннотация
В данной курсовой работе исследуются рычажные и зубчатые механизмы.
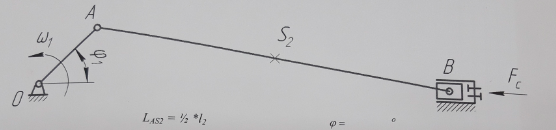
В первой части курсовой работы “Кинематический и силовой анализ рычажных механизмов” производится исследование привода воздушного компрессора в виде кривошипно-ползунного механизма с параметрами: ход ползуна (SB)- 0,02м; длина шатуна(L2)- 0,06м; угловая скорость кривошипа (ω1)= 200 рад/с; масса шатуна (m2)= 0,05 кг; масса ползуна (m3)= 0.075 кг; сила сопротивлению движения ползуна (Fc)= 100 H.
I часть: «Кинематический и силовой анализ механизма»
1. Исходное задание:
LAS2 = 0.5LAB m2 = 0.05 кг
SB = 0.02 м m3 = 0.075 кг
L2 = 0.06 м Fc = 100 H
ω1 = 200 рад/с φ1 = 150 º
2. Построение плана механизма
а) Определение длины кривошипа
l1 =  = 0.01 (м)
= 0.01 (м)
б) Определение масштабного коэффициента механизма
KL =  =
=  = 0.0004 (
= 0.0004 ( )
)
в) Определение длины шатуна АВ на плане механизма
АВ =  =
=  = 150 (мм)
= 150 (мм)
г) Построение плана
Изображаем кинематическую схему механизма в заданной позиции входного звена (для угла, задающего положение входного звена, равному  ) в масштабе.
) в масштабе.
Положения всех звеньев механизма определяем методом засечек по известным их размерам, координатам неподвижных точек и направляющих (стоек) и положению входного звена.
Также показываем схему механизма в восьми положениях через 45° изменения угла  . Показываем на схеме траектории движения точек А, В и S2.
. Показываем на схеме траектории движения точек А, В и S2.
3. Кинематический анализ механизма
3.1 Построение плана скоростей
а) Определение линейной скорости точки А
υА = ω1l1 = 200*0.01 = 2 ( )
)
б) Определение масштабного коэффициента плана скоростей
Кv =  =
=  = 0.029 (
= 0.029 ( )
)
в) Векторное уравнение плана скоростей
 В = А + ВА
В = А + ВА
А  ОА
ОА  ВА АВ
ВА АВ  В
В  x-x
x-x
г) Построение плана
 =
= 
υB = В*KV = 27*0.029 = 0.783 ()
υS2 =  S2*KV = 43*0.029 = 1.247()
S2*KV = 43*0.029 = 1.247()
υBA = BA* Kv = 61*0.029 = 1.769 ()
ω2 =  =
=  = 29.48 (
= 29.48 ( )
)
3.2 Построение плана ускорений
а) Определение линейных ускорений
 = ω12*l1 = 400
= ω12*l1 = 400  )
)
 = ω22*l2 = 52.144 )
= ω22*l2 = 52.144 )
б) Определение коэффициента плана ускорений
КА =  =
=  = 4 (
= 4 ( )
)
в) Векторное уравнение плана ускорений
 В = А + BA
В = А + BA
В = + + 
В x-x  OA
OA  AB AB
AB AB
г) Построение плана
 n2 =
n2 =  =
=  = 13.03 (мм)
= 13.03 (мм)
=
д) Определение линейных и угловых ускорений звеньев и точек механизма
B =  B*KA = 77*4 = 308 )
B*KA = 77*4 = 308 )
 2 = s2* KA = 85*4 = 340 )
2 = s2* KA = 85*4 = 340 )
= n2B*KA = 48*4 = 192 )
 2 =
2 =  =
=  = 3200
= 3200  )
)
4. Силовой анализ механизма
4.1 Определение сил, действующих на механизм
На механизм действует:
внешняя сила: Fc = 100 (H);
массовые силы: G2 = m2g = 0.5 (H), (g = 10 (H)), G3 = m3g = 0.75 (H), (g = 10(H));
силы инерции: Fи.2 = m2  = 17(Н), Fи.3 = m3 B = 23.1 (H),
= 17(Н), Fи.3 = m3 B = 23.1 (H),
момент инерции:  =
=  = 0.12m2
= 0.12m2  2 = 0.069 (Н*м)
2 = 0.069 (Н*м)
4.2 Силовой анализ группы звеньев 2-3
а) Определим составляющую реакции в точке А
-  из уравнения моментов относительно точки В:
из уравнения моментов относительно точки В:
 = 0: - *AB + + G2*
= 0: - *AB + + G2*  *KL +
*KL +  * *KL = 0
* *KL = 0
 =
=  ( + G2* *KL + * *KL) =
( + G2* *KL + * *KL) =

 =
=  = 3.179 (H)
= 3.179 (H)
б) Для определения реакции  и
и  составляем векторное уравнение плана сил:
составляем векторное уравнение плана сил:
 + + +
+ + +  +
+  +
+  +
+  +
+ 
Для графического решения данного уравнения, путем построения плана сил, выберем масштабный коэффициент этого плана:
KF =  =
=  = 1 (
= 1 ( )
)
Для построения плана находим длины векторов на плане, с помощью которых, будем изображать направления действующих на группу звеньев сил.
 =
=  = 3.179 (мм)
= 3.179 (мм)  =
=  = 23.1 (мм)
= 23.1 (мм)
 =
=  = 17 (мм)
= 17 (мм)  =
=  = 0.75 (мм)
= 0.75 (мм)
 =
=  = 0.5 (мм)
= 0.5 (мм)  = 100 ()
= 100 ()
в) Определим численное значение неизвестных реакций:
F34 = z34*KF = 11.22 (H)
F21 = z21*KF = 140 (H)
F23 = z23*KF = 123.5 (H)
4.3 Силовой анализ основного механизма
Исходя из 3 закона Ньютона  =
= 
 =
=  – это следует из условия равновесия ведущего звена
– это следует из условия равновесия ведущего звена
Также из условия равновесия следует, что Мур = F12*  *KL =
*KL =
= 140*10.12*0.0004 = 0.57 (Н*м)
5. Определение уравновешивающего момента методом рычага Н.Е. Жуковского
 = 0: Fур
= 0: Fур  +
+  *
* 

 * + (
* + ( )*
)*  = 0
= 0
=> Fур =  ( *
( * 
 * + (
* + ( )* ) =
)* ) =
=  =
= 
=>  = Fур*l1 = *0.01 =
= Fур*l1 = *0.01 =  – уравновешивающий момент
– уравновешивающий момент
=> погрешность δ =  *100% =
*100% =  *100%
*100%  4% - меньше критической
4% - меньше критической