Сглаживающий фильтр — устройство для сглаживания пульсаций после выпрямления переменного тока диодным мостом. Простейшим сглаживающим фильтром является электролитический конденсатор большой ёмкости, установленный на схеме параллельно нагрузке, соблюдая полярность конденсатора. Предназначены для сглаживания пульсаций напряжения.
По количеству элементов выделяют: однозвенные и многозвенные.
Индуктивный фильтр состоит из дросселя, включенного последовательно с нагрузкой. Под дросселем подразумевается обычная катушка, характеризующаяся определённой индуктивностью. Сглаживающее действие такого фильтра основано на возникновении в дросселе ЭДС самоиндукции, препятствующей изменению выпрямленного тока. Дроссель выбирается так, чтобы индуктивное сопротивление его обмотки( )было больше сопротивления нагрузки
)было больше сопротивления нагрузки  . При выполнении этого условия большая часть переменной составляющей падает на обмотке дросселя. На сопротивлении нагрузки выделяется в основном постоянная составляющая выпрямленного напряжения
. При выполнении этого условия большая часть переменной составляющей падает на обмотке дросселя. На сопротивлении нагрузки выделяется в основном постоянная составляющая выпрямленного напряжения  и переменная составляющая, величина которой намного меньше переменной составляющей напряжения, падающего на обмотке дросселя.
и переменная составляющая, величина которой намного меньше переменной составляющей напряжения, падающего на обмотке дросселя.
Коэффициент сглаживания такого фильтра равен KC = m·ω·LФ/RH
где RH — сопротивление нагрузки;  Ф — индуктивность обмотки дросселя; ω — угловая частота;
Ф — индуктивность обмотки дросселя; ω — угловая частота;  — коэффициент зависящий от схемы выпрямителя и показывающий, во сколько раз частота основной гармоники выпрямленного напряжения больше частоты тока сети.
— коэффициент зависящий от схемы выпрямителя и показывающий, во сколько раз частота основной гармоники выпрямленного напряжения больше частоты тока сети.
Недостаток: большой габарит и масса катушки.
Емкостной фильтр рассматривают не отдельно, а всегда совместно с таким прибором, как выпрямитель. Его действие основано на накоплении электрической энергии в электрическом поле конденсатора и его разряде при отсутствии тока через вентиль на сопротивление нагрузки  . Причём конденсатор подключается параллельно к нагрузке. Конденсатор имеет следующее реактивное сопротивление
. Причём конденсатор подключается параллельно к нагрузке. Конденсатор имеет следующее реактивное сопротивление  , где
, где  это ёмкость конденсатора. Коэффициент сглаживания такого фильтра будет следующим:
это ёмкость конденсатора. Коэффициент сглаживания такого фильтра будет следующим:
S = PВХ (коэф. пульсаций на входе)/РВЫХ (коэф. пульсаций на выходе) – эффективность сглаживающего фильтра.
При увеличении m коэффициент сглаживания индуктивного фильтра увеличивается, а емкостного уменьшается. Поэтому емкостной фильтр выгодно применять при выпрямлении однофазных, а индуктивный при выпрямлении многофазных токов.При увеличении сглаживающее действие емкостного фильтра увеличивается, а индуктивного уменьшается. Поэтому емкостной фильтр выгодно применять при малых, а индуктивный при больших токах нагрузки.

55. Структурная схема и временная диаграмма iK и UВЫХ от времени t. Усилительный каскад на биполярном транзисторе с ОЭ.
Транзисторы – это полупроводниковые приборы, которые имеют 3 электорда, 2 p-n перехода, и подключается к 2-м источникам напряжения.
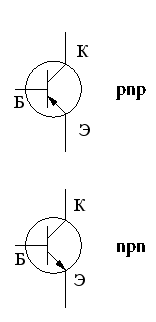 Различают: биполярные (имеют 2 вида носителей заряда: электронные дыры и электроны) и полевые (электроны).
Различают: биполярные (имеют 2 вида носителей заряда: электронные дыры и электроны) и полевые (электроны).
Б – база;
Э - эмиттер
К - коллектор
- электрическое обозначение транзисторов типа p-n-p
- эта схема самая распространенная. Эмиттер является общим электродом для входной и выходной цепи.
β (коэффициент передачи IБ) = ΔIK /
/ΔIЭ - ΔIK

56. Температурная стабилизация транзисторов. Режим работы усилительного каскада.
При нагревании рабочая точка смещается по нагрузочной прямой, что приводит к увеличению коллекторного тока Iк и уменьшению напряжения Uкэ. Это равносильно приоткрыванию транзистора. Поэтому основной задачей температурной стабилизации является синхронная с увеличением температуры стабилизация положения рабочей точки. На рис.а) показана схема с использованием терморезистора.
а)  б)
б) 
При нагревании сопротивление терморезистора уменьшается, что приводит к общему уменьшению сопротивления включeных в параллель резисторов R6" и Rt. За счeт этого напряжение ибэ будет уменьшаться, эмиттерный переход подзапираться, и рабочая точка сохраняет своё положение на нагрузочной прямой.
Аналогичным образом происходит термостабилизация рабочей точки полупроводниковым диодом рис.б).
При увеличении температуры сопротивление диодов в обратном включении будет уменьшаться за счет термогенерации носителей заряда в полупроводнике. Общее сопротивление включенных параллельно резистора R6" и диода VD1 будет уменьшаться, что приведет к уменьшению напряжения Uбэ, транзистор подзапирается и рабочая точка сохраняет свое положение.
Недостатком схем с терморезистором и полупроводниковым диодом является то, что и терморезистор, и полупроводниковый диод должны подбираться по своим температурным свойствам для каждого конкретного транзистора. Поэтому наиболее часто применяют схемы температурной стабилизации отрицательной обратной связью (ООС) по постоянному току и напряжению.
Понятие режима работы или класса усилителя определяется соотношением анодного тока покоя к величине тока сигнала и формой анодного тока. До сих пор во всех примерах рассматривались усилители класса А, хотя данный факт до сих пор никак не акцентировался. Для исправления указанного упущения необходимо ввести некоторые определения.
Режим класса А
При этом режиме величина анодного тока покоя всегда задается такой, чтобы даже при минимально возможном значении входного сигнала (а также и при его отсутствии) анодный ток не снижался до нулевого значения. Иными словами, лампа, работающая в классе А, никогда не запирается. Если на вход (управляющую сетку) такого каскада усиления будет подано синусоидальное напряжение, форма анодного тока также будет синусоидальной. Режим класса А характеризуется наилучшей линейностью усиления, однако по энергетической эффективности он самый плохой. Теоретическое значение максимального КПД при синусоидальной форме выходного сигнала в режиме класса А равно 50%. Наиболее простое тому объяснение — большой ток покоя, существующий даже при полном отсутствии входного сигнала. Низкий КПД кроме очевидного высокого энергопотребления, неудобен тем, что на анодах ламп рассеивается повышенная тепловая мощность, что уменьшает максимально достижимую полезную мощность, отдаваемую ими.
Режим класса В
В этом режиме ток покоя равен нулю, а сам анодный ток протекает только при действии положительной полуволны входного сигнала. Таким образом, лампа заперта в период действия отрицательной полуволны входного сигнала. Так как входной сигнал фактически претерпевает однополупериодное выпрямление, в сигнале возникают существенные искажения в виде гармоник. Для решения данной проблемы приходится принимать дополнительные меры (применение двухтактных схем усиления). Однако, в режиме класса В анодный ток существует при любом значении амплитуды входного сигнала, что не нарушает линейности амплитудно-амплитудной характеристики усилителя. Теоретическое значение максимального КПД (при полном использовании лампы по напряжению и току, что на практике недостижимо) при синусоидальной форме выходного сигнала в случае двухтактного усилителя класса В составляет 78,5%. Это напрямую связано с отсутствием тока покоя.
Режим класса С
В режиме класса С время протекания анодного тока меньше времени действия положительной полуволны входного сигнала. Данный метод используется только в ВЧ усилителях радиопередатчиков, в которых могут использоваться резонансные методы восстановления основной гармоники сигнала. Это режим характеризуется гораздо более высокими значениями КПД и уровнем искажений по сравнению с применяемым в усилителях режимом класса В.
57. Трансформатор. Принципиальная схема передачи электрической энергии к потребителю. Как зависит расход меди, стоимость и сложность монтажа.
Трансформаторы служат для преобразования переменного напряжения (тока) одной величины в напряжение (ток) другой величины той же частоты.
Потребители электроэнергии имеются повсюду. Производится же она в сравнительно немногих местах, близких к источникам топливо- и гидроресурсов. Электроэнергию не удается консервировать в больших масштабах. Она должна быть потреблена сразу же после получения. Поэтому возникает необходимость в передаче электроэнергии на большие расстояния. Передача энергии связана с заметными потерями. Дело в том, что электрический ток нагревает провода линий электропередачи. В соответствии с законом Джоуля-Ленца энергия, расходуемая на нагрев проводов линии, определяется формулой Q=Rt, где R – сопротивление линии. При очень большой длине линии передача энергии может стать экономически невыгодной. Значительно снизить сопротивление линии практически весьма трудно. Поэтому приходится уменьшать силу тока.
Так как мощность тока пропорциональна произведению силы тока на напряжение, то для сохранения передаваемой мощности нужно повысить напряжение в линии передачи. Чем длиннее линия передачи, тем выгоднее использовать более высокое напряжение. Так, в высоковольтной линии передачи Волжская ГЭС – Москва и некоторых других используют напряжение 500 кВ. Между тем генераторы переменного тока строят на напряжения, не превышающие 16-20 кВ.
Более высокое напряжение потребовало бы принятия сложных специальных мер для изоляции обмоток и других частей генераторов. Поэтому на крупных электростанциях ставят повышающие трансформаторы. Для непосредственного использования электроэнергии в двигателях электропривода станков, в осветительной сети и для других целей напряжение на концах линии нужно понизить. Это достигается с помощью понижающих трансформаторов. Обычно понижение напряжения и соответственно увеличение силы тока происходят в несколько этапов. На каждом этапе напряжение становится все меньше, а территория, охватываемая электрической сетью, - все шире. Повышающий трансформатор Понижающий трансформатор Понижающий трансформатор Понижающий трансформатор При очень высоком напряжении между проводами начинается разряд, приводящий к потерям энергии. Допустимая амплитуда переменного напряжения должна быть такой, чтобы при заданной площади поперечного сечения провода потери энергии вследствие разряда были незначительными. При очень высоком напряжении между проводами начинается разряд, приводящий к потерям энергии. Допустимая амплитуда переменного напряжения должна быть такой, чтобы при заданной площади поперечного сечения провода потери энергии вследствие разряда были незначительными.
58. Устройство и принцип действия трансформатора. Мгновенные значения ЭДС первичной и вторичной обмоток. Коэффициент трансформации трансформатора.
Однофазный трансформатор состоит из магнитопровода из ферромагнитного материала, на котором размещены две обмотки (катушки) (а). б) – обозначение трансформатора на электрических схемах; в) - обозначение на схемах электроснабжения

Мгновенное значение ЭДС индукции e в любом витке первичной или вторичной обмотки одинаково. Согласно закону Фарадея оно определяется формулой e=-Ф’
где Ф’ – производная потока магнитной индукции по времени.
Если Ф = Фm cos ωt, то Ф’ = -ωФm sin ωt. Следовательно, e = ωФm sin ωt, или e = Εm sin ωt, где Εm = ωФm – амплитуда ЭДС в одном витке.
В первичной обмотке, имеющей N1 витков, полная ЭДС индукции e1 равна N1e. Во вторичной обмотке полная ЭДС индукции e2 равна N2e (N2 – число витков этой обмотки). Отсюда следует, что e1/e2=N1/N2
Обычно активное сопротивление обмоток трансформатора мало, и им можно пренебречь. В этом случае модуль напряжения на зажимах катушки приблизительно равен модулю ЭДС индукции. При разомкнутой вторичной обмотке трансформатора ток в ней не течет и имеет место соотношение
Мгновенные значения ЭДС e1 и e2 изменяются синфазно, поэтому их отношение можно заменить отношением действующих знаний E1 и E2 этих ЭДС или, учитывая равенства |u1| ≈ |e1| и |u2| = |e2|, отношением действующих значений напряжений U1 и U2: U1/U2 ≈ E1/E2 = N1/N2 = K.
Величина K называется коэффициентом трансформации. При K > 1 трансформатор является понижающим, а при K < 1 – повышающим.
59. Опыты холостого хода.
В опыте холостого хода (рис. 1.10) вторичная обмотка трансформатора разомкнута, а к первичной подводится номинальное напряжение U1н = U10.

Схема замещения трансформатора (рис. 1.9) для режима холостого хода (I2=0) примет вид (рис. 1.11).

Измерив ток холостого хода I10 и мощность P10, потребляемую трансформатором, согласно схеме замещения (рис. 1.11,а) находим
(1.30)

где: Zвх х – входное сопротивление трансформатора при опыте холостого хода.
Так как ток холостого хода мал по сравнению с номинальным током трансформатора, электрическими потерями ΔPэл1 = I210 R1 пренебрегают и считают, что вся мощность, потребляемая трансформатором, расходуется на компенсацию магнитных потерь в стали магнитопровода. При этом
 ,
,
откуда R0 = P10 / I210.
Аналогично считают, что X1 + X0 ≈ X0, так как сопротивление X0 определяется основным потоком трансформатора Ф (потоком взаимоиндукции), а X1 – потоком рассеяния ФΔ1, который во много раз меньше Ф. Поэтому с большой степенью точности полагают, что
(1.32)
Z0 = U10 / I10;  .
.
Измерив напряжения U10 и U20 первичной и вторичной обмоток, определяют коэффициент трансформации
(1.33)
n = U10 / U20.
Векторная диаграмма трансформатора в режиме холостого хода, построенная исходя из указанных выше допущений, изображена на рис. 1.11, б. В действительности ток Í10 создает в первичной обмотке падения напряжения Í10 R1 и j Í10 X1, поэтому  . Соответствующая векторная диаграмма показана на рис. 1.11, в.
. Соответствующая векторная диаграмма показана на рис. 1.11, в.
60. Опыт короткого замыкания в трансформере.
Вторичную обмотку замыкают накоротко сопротивление Zн = 0), а к первичной подводят пониженное напряжение (см. рис.1.12) такого значения, при котором по обмоткам проходит номинальный ток Iном. В мощных силовых трансформаторах напряжение Uк при коротком замыкании обычно составляет 5-15% от номинального. В трансформаторах малой мощности напряжение Uк может достигать 25-50% от Uном.

Рис. 1.12
Так как поток, замыкающийся по стальному магнитопроводу, зависит от напряжения приложенного к первичной обмотке трансформатора, а магнитные потери в стали пропорциональны квадрату индукции, т.е. квадрату магнитного потока, то ввиду малости Uк пренебрегают магнитными потерями в стали и током холостого хода. При этом из общей схемы замещения трансформатора исключают сопротивления R0 и X0 и преобразуют ее в схему, показанную на (рис 1.13, а). Параметры этой схемы определяют из следующих соотношений:
(1.34)

61. Электрическая схема трансформатора при нагрузке. (вместо W писать амегу)

В нагрузочном режиме вторичная обмотка трансформатора замкнута на сопротивлении нагрузки 
R1,R’2,X1,X’2- активное и индуктивное сопротивление первичной и вторичной обмотки. Во вторичной цепи проходит ток I2, при этом в магнитной цепи трансформатора появляется вторая намагничивающая сила МДС F2=W2*I2 (в соответствии с законом Ленса –будет действовать против основной МДС F10=W1*I10). Она будет стараться ослабить основной магнитный поток Фm, но ослабление магнитного потока не происходит, т.к. действие вторичной МДС F2 будет компенсироваться увеличением тока в первичной обмотке (будет увеличиваться до такой величины при которой восстановится первичная МДС F10 , необходимая для возбуждения Фm-САМОРЕГУЛИРОВАНИЕ В ТРАНСФОРМАТОРЕ.
Это объясняется тем что: приложенное напряжение U1=Е1=4,44* f *W1(число витков в трансформаторе)* Фm=const Фm= const МДС F10, которая его создает будет const. (т.е. в трансформаторе магнитный поток не меняется). f=50 Гц (частота тока).
F1+F2=F10; W1*I1+W2*I2=I10*W1; I1= I10-W1/W2*I2 когда трансформатор находится под нагрузкой I1 складывается с I10(ток холостого хода). I’2= W1/W2*I2(нужен для компинсации размагничивающего действия вторичной обмотки). I’2- вторичный ток приведенный к первичной обмотке. При нагрузке вторичной обмотке в ней действует ЭДС Е2 и она замкнута на , обмотка обладает активным и индуктивным сопротивлением.

 Действующие значения ЭДС первичной и вторичной обмоток:
Действующие значения ЭДС первичной и вторичной обмоток:
ЭДС от потоков рассеивания Ė10 = - jX1Í1; Ė20 = - jX2Í2
По 2-му закону Киргоффа: Е2=r2*I2+jX2*I2+U2 U2во вторичной обмотке в нагрузочном режиме отличается от ЭДС Е2 на величину падений напряжения в активном и индуктивном сопротивлении.
Приведенное сопротивление вторичной обмотки к первичной выполняют так чтобы потери мощности остались одинаковые:r’н=rн*Kт2 (Kт-коэфф. трансформации трансформатора).
62. Схема замещения трансформатора. Ток холостого хода трансформатора. Упрощенная схема.
Схема замещения трансформатора:

Используется для полных расчетов трансформатора в которых объединяют первичную и вторичную обмотку трансформатора, учитывая Ктр (коэфф. трансформации), причем во вторичной обмотке учитываются приведенные величины (U,I,R).
X1,R1-индуктивное и активное сопротивления первичной обмотки трансформатора.
Z’н, R’2, X’2-активное и индуктивное сопротивления вторичной обмотки.
ЭДС Е1и Е2’-потенциальные (равные), как и: а, а’ и в, в’. cледовательно можем объединять первичную и вторичную обмотку.
Между точками а и в присоединены сопротивления намагничивания ветви:Rµ-активное,Хµ-индуктивное, Zµ-полное сопротивление намагничивания цепи.
Zµ=  . Потери мощности на намагничивании цепи (на намагничивание магнитопровода): Ро=Рх.х=I102*Rµ, где I10-ток холостого хода.
. Потери мощности на намагничивании цепи (на намагничивание магнитопровода): Ро=Рх.х=I102*Rµ, где I10-ток холостого хода.
По 1-му закону Кирхгоффа: I1=I10-I2’; Хµ-создается потоком рассеивания Фр, X1- cоздается основным магнитным потоком Ф. Фр<<Ф Хµ>> X1(индуктивное сопротивление).
Для практических расчетов ветвь намагничивания обычно отбрасывается, т.к. ток I10 очень мал (3-5% от I10) можно отбросить схему магнитной цепи и получим I1≈I2.
Упрощенная схема замещения:

Общее сопротивление(короткого замыкания) rк=r1+r2’; Хк=Х1+Х2’- короткого замыкания.
Схема примет еще более упрощенный вид:

Полный ток холостого хода  . Iа-активная составляющая-создает нагрев магнитопровода(потери тепловой энергии), а именно гистерезис(пермагничивание магнитопровода) и создание вихревых токов в магнитопроводе. Iр-реактивная состовляющая(идет на создание магнитного потока).
. Iа-активная составляющая-создает нагрев магнитопровода(потери тепловой энергии), а именно гистерезис(пермагничивание магнитопровода) и создание вихревых токов в магнитопроводе. Iр-реактивная состовляющая(идет на создание магнитного потока).
63. Изменение напряжения на зажимах вторичной обмотки трансформатора при нагрузке. Коэффициент нагрузки. Внешняя характеристика трансформатора.
 По второму закону Кирхгоффа:
По второму закону Кирхгоффа:
U2’=U1-(rк+jXк)I2’ (при изменении rк, Xк, I2’, U2’на зажимах вторичной обмотки будет изменяться).
При холостом ходе трансформатора, когда I2’=0 (вторичная обмотка разомкнута и именно поэтому коэфф. трансформации Ктр можно считать только на холостом ходу).Тогда: U2’=U1= U2хх=Е2
Для этой схемы замещения можно привести векторную диаграмму по написанному уравнению выше:
Между U2’и U1 имеется разность по величине- потеря вторичного напряжения в рабочем режиме ∆U2=U1-U2’-арифметическая разность).Угол сдвига фаз между векторами U2’и U1 мал геометрическая разность ≈ арифметической разности.
∆U2=U1-U2’; ∆U2=U1-U2’=ОС-ОА=АС.
Коэффициент нагрузки трансформатора ß трансформатора -до такой величины считая от номинальной загружен в данный момент трансформатор.
ß=  .Можно представить в другом виде:
.Можно представить в другом виде:
 ∆U2= ß(Uак cosφ2 + Uрк sin φ2), ак-активная составляющая, рк-реактивная составляющая(обычно выражается в %).
∆U2= ß(Uак cosφ2 + Uрк sin φ2), ак-активная составляющая, рк-реактивная составляющая(обычно выражается в %).
rк и Хк-определяются из опыта короткого замыкания. Уравнения выше показывают, что величина отклонения вторичного напряжения от ЭДС Е2 зависит от величины сопротивления нагрузки и от характера нагрузки (активная, индуктивная, емкостная), т.к. угол φ2 его направление и величина зависят от характера нагрузки (- емкостная, +активная,индуктивная).
 Внешняя характеристика трансформатора – U 2 = f (I2) при cosφн = const и U1 = U 1ном, U 2х=Е2
Внешняя характеристика трансформатора – U 2 = f (I2) при cosφн = const и U1 = U 1ном, U 2х=Е2
< емкостная нагрузка
= активная нагрузка
> индуктивная нагрузка
Характеристика показывает, чем больше индуктивность нагрузки, тем сильнее уменьшается вторичное напряжение. Практические потери напряжения в трансформаторе при полной нагрузке (1-6%).
64. КПД трансформатора. Магнитные потери в стали и потери в обмотках трансформатора. Зависимость КПД от коэффициента нагрузки трансформатора.
η = =  ,
,
где P 2 – активная мощность, потребляемая нагрузкой (полезная); P 1 – активная мощность, подведенная к трансформатору из сети, ∆P-потери в трансформаторе;
∆P = ∆P стали + ∆P электр+ ∆P мех – сумма мощностей потерь в стали сердечника (на гистерезис и образование вихревых токов)- идут на образование магнитного потока и перемагничивание и меди обмоток (вызванные нагреванием проводников обмоток), а также добавочные потери.
Для расчета η используют (зависимость КПД от коэффициента загрузки трансформатора):
 , где
, где
 ß-коэффициент нагрузки трансформатора, Sном-общая номинальная мощность.
ß-коэффициент нагрузки трансформатора, Sном-общая номинальная мощность.
Типичный ход кривой η(β) показан на рисунке.
КПД максимален при 
После достижения максимума КПД происходит уменьшение КПД трансформатора, т.к. на этом участке потери в виде меди нарастают быстрее, чем растет мощность P2 и КПД.
65. Вращающееся магнитное поле.
Возьмем три катушки и разместим из в пространстве со смещением друг относительно друга на 1/3 часть окружности (под углом 120 градусов):
 AX,BY,CZ на рисунке изображено по одному витку, к виткам подводится трехфазное напряжение и по ним проходят трехфазные токи: ia=Im sinωt; iв=Im sin(ωt-120°); iс=Im sin(ωt-240°); что токи также сдвинуты на 120° в пространстве.
AX,BY,CZ на рисунке изображено по одному витку, к виткам подводится трехфазное напряжение и по ним проходят трехфазные токи: ia=Im sinωt; iв=Im sin(ωt-120°); iс=Im sin(ωt-240°); что токи также сдвинуты на 120° в пространстве.
Каждый виток при прохождении по нему тока I будет создавать свое магнитное поле с индукцией В:
В-вектор, располагается перпендикулярно к оси катушки.
Для получения вращающегося магнитного поля необходимо 3 фактора:
 1)три обмотки подключить к трехфазному напряжению; 2)оси должны быть сдвинуты на 120°;3) фазы трехфазных токов должны быть сдвинуты на 120°.
1)три обмотки подключить к трехфазному напряжению; 2)оси должны быть сдвинуты на 120°;3) фазы трехфазных токов должны быть сдвинуты на 120°.
Частота вращения магнитного поля: n=  , об/мин (где f =50 Гц-частота тока).
, об/мин (где f =50 Гц-частота тока).
71. Схема замещения АД и приведенные величины.
Реактивное сопротивление цепи ротора Х 2 s зависит от частоты f 2 и равно Х 2 s = 2π f 2 L 2 = 2π f 1 sL 2 = sX 2, где Х 2= 2π f 1 L 2, и L 2 – соответственно, индуктивное сопротивление и эквивалентное значение индуктивности неподвижного (заторможенного) ротора. Схема замещения на рис.27.6, а соответствует уравнению
 .
.
Рис.27.6.Схемы замещения роторной цепи
Разделив обе части на s, получим уравнение
 , которому соответствует цепь на рис. 27.6, б. В этой цепи ЭДС Е 2 имеет частоту f 1, т. е. цепь эквивалентна режиму заторможенного ротора. Мощность эквивалентного сопротивления R 2å/ s равна электромагнитной мощности, поступающей в ротор:
, которому соответствует цепь на рис. 27.6, б. В этой цепи ЭДС Е 2 имеет частоту f 1, т. е. цепь эквивалентна режиму заторможенного ротора. Мощность эквивалентного сопротивления R 2å/ s равна электромагнитной мощности, поступающей в ротор:
 .
.
Полная схема замещения АД аналогична Т-образной схеме замещения трансформатора, однако чаще пользуются упрощенной Г-образной схемой замещения одной фазы (рис.26.7), где R 1, X 1 – сопротивления статорной цепи; R, X – приведенные к статору сопротивления роторной цепи; R 0, X 0 – сопротивления ветви намагничивания; I 0 – ток холостого хода. Из-за воздушного зазора между статором и ротором ток холостого хода I 0 АД значительно выше тока холостого трансформатора и составляет (0,2¸0,5) I 1ном.
Рис.27.7.Приведенная схема замещения АД
Зависимость частоты вращения от вращающего момента (n = f (M)) в установившемся режиме называют механической характеристикой двигателя. Механическая характеристика АД – зависимость частоты вращения ротора от момента сопротивления нагрузки на валу.
Рис.27.8. Механическая характеристика АД
Из схемы находим:  . Подставив в формулу момента находим М:
. Подставив в формулу момента находим М:


где Х к – реактивное сопротивление при критическом моменте(X К = X 1 + X).
Формула совместно с подстановкой s = 1 – определяет механическую характеристику АД. Связь s и n учитывают совмещением осей s и n. Механическая характеристика показана на рис.27.8, где оси n и s направлены навстречу друг другу и n = 0 соответствует s = 1, а n = n 1 соответствует s = 0 (значения n указаны справа от оси, s – слева). Анализ формулы (3.40) с помощью dM/ds = 0 дает два экстремума:
 ;
;
где «+» соответствует двигательному режиму (квадрант I); «–» – генераторному (квадрант II). Скольжение s = s Ки момент М = M К = M max называют критическими.
72. Механическая характеристика асинхронного двигателя. Пуск в ход.
Зависимость частоты вращения от вращающего момента (n = f (M)) в установившемся режиме называют механической характеристикой двигателя. Механическая характеристика АД – зависимость частоты вращения ротора от момента сопротивления нагрузки на валу.
Рис.27.8. Механическая характеристика АД
Из схемы находим: . Подставив в формулу момента находим М:
где Х к – реактивное сопротивление при критическом моменте(X К = X 1 + X).
Формула совместно с подстановкой s = 1 – определяет механическую характеристику АД. Связь s и n учитывают совмещением осей s и n. Механическая характеристика показана на рис.27.8, где оси n и s направлены навстречу друг другу и n = 0 соответствует s = 1, а n = n 1 соответствует s = 0 (значения n указаны справа от оси, s – слева). Анализ формулы (3.40) с помощью dM/ds = 0 дает два экстремума:
;
где «+» соответствует двигательному режиму (квадрант I); «–» – генераторному (квадрант II). Скольжение s = s Ки момент М = M К = M max называют критическими.
Рассмотрим детальнее механическую характеристику в двигательном режиме (рис.27.8), для которого s К > 0.
Уравнение механической характеристики можно преобразовать к виду (уточненная формула Клосса):
 , где a = R 1/ R.
, где a = R 1/ R.
Рис.27.9. Механическая характеристика двигателя
На рис. 27.9 представлены статические механические характеристики некоторых механизмов. Характеристика I (ее называют вентиляторной) типична для вентиляторов, центрифуг, гребных винтов, насосов.
Рис.27.10.Механические характеристики рабочих механизмов
Характеристикой II обладают механизмы постоянной мощности (бетономешалки, шаровые мельницы). Характеристика III обычна для грузоподъемных механизмов (краны, лебедки). Эти механизмы создают активный постоянный момент сопротивления.
Статичность характеристик на рисунках означает, что каждой их точке соответствует установившаяся частота вращения n = const. Из уравнения динамики вращательного
движения
 ,
,
где J – приведенный к валу двигателя момент инерции всех вращающихся частей, следует, что установившийся режим (dn/dt = 0) соответствует балансу вращающего М и тормозного (момента сопротивления) M C моментов (М = M C) на валу и может быть найден как точка пересечения характеристик АД и рабочего механизма.
На рис.27.9 в качестве нагрузки выступает механизм вентиляторного типа с установившимся режимом, который соответствует точке н. На практике АД подбирают так, чтобы установившийся режим соответствовал номинальному режиму (n = n ном, М = М ном), задаваемому заводом-изготовителем. В паспорте двигателя приводятся следующие данные: тип, Р ном, U ном, I ном, n ном, ηном, λ М = М max/ М ном, cosφном. Для АД с короткозамкнутым ротором дополнительно даются λп = М п/ М ном (М п – пусковой момент) и отношение пускового тока к номинальному I п/ I ном. По паспортным данным определяется М ном = 9,55 Р ном/ n ном.
Точка n 1 соответствует режиму идеального холостого хода (n 1; М = 0). В точке s = s К (критический режим)АД развивает максимальный вращающий момент М К. Точка п характеризует пуск АД. В этой точке n = 0 и М = М п – пусковой момент двигателя. Участок n 1– n К характеристики устойчив, т. е. при нарушении баланса моментов М = М С (изменение нагрузки или питающего напряжения) происходит изменение частоты вращения, приводящее к новому балансу моментов (при М С < М К). Участок0– n К, как правило, неустойчив.
Важным показателем механических характеристик является их жесткость β = dM / dn. Чем жестче, т. е. чем меньше угол наклона рабочего участка характеристики двигателя, тем меньше изменяется частота вращения n при изменении момента нагрузки М С.
Паспортный показатель λ М = М max/ М ном называют кратностью максимального момента. Он характеризует перегрузочную способность двигателя. Для АД общего назначения λ М = 1,7¸2,5, для АД, работающих с большими перегрузками (крановые, металлургические), λ М = 2,2¸3,5. Кратность пускового момента λп = М п/ М ном для двигателей малой и средней мощности (менее 100 кВт) составляет λп = 1,0¸2,0.
Для двигателей средней и большой мощности сопротивлением R 1 можно пренебречь, и формулы принимают следующий вид:
 ;
;  ;
;  .
.
Третью формулу называют упрощенной формулой Клосса. В номинальном режиме (s = s ном, М = М ном) из нее находим

Механическую характеристику при номинальных значениях U 1ном, f 1ном и отсутствии сопротивления R д в цепи ротора (R д = 0, R 2Σ = R 2) называют естественной. При других условиях получают искусственные характеристики.
73. Вращающий момент асинхронного двигателя.
При подключении обмоток неподвижного статора к трехфазной питающей сети внутри статора образуется вращающееся магнитное поле, частота вращения которого определяется по формуле  (p – число пар полюсов). Поле статора пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в этих проводниках появляются индукционные токи. На каждый проводник с током в магнитном поле действует сила, поэтому на валу ротора образуется вращающий момент М, приводящий ротор во вращение в направлении вращающегося поля статора. По мере разгона АД вращающий момент М изменяется до установления равновесия М = М с, где М с – момент сопротивления (тормозной момент), создаваемый приводимым во вращение механизмом (насос, центрифуга, вентилятор и т. д.) и силами трения. Равновесию моментов соответствует установившийся режим двигателя с постоянной частотой вращения ротора n = const.
(p – число пар полюсов). Поле статора пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в этих проводниках появляются индукционные токи. На каждый проводник с током в магнитном поле действует сила, поэтому на валу ротора образуется вращающий момент М, приводящий ротор во вращение в направлении вращающегося поля статора. По мере разгона АД вращающий момент М изменяется до установления равновесия М = М с, где М с – момент сопротивления (тормозной момент), создаваемый приводимым во вращение механизмом (насос, центрифуга, вентилятор и т. д.) и силами трения. Равновесию моментов соответствует установившийся режим двигателя с постоянной частотой вращения ротора n = const.
|
| Поделиться: |
Поиск по сайту
Все права принадлежать их авторам. Данный сайт не претендует на авторства, а предоставляет бесплатное использование.
Дата создания страницы: 2017-04-20 Нарушение авторских прав и Нарушение персональных данных