Рассмотрим объект с запаздыванием при помощи передаточной функции, находящейся на апериодической границе устойчивости, вида:
 , (5)
, (5)
где  – параметры, которые принимают значение в заданных интервалах.
– параметры, которые принимают значение в заданных интервалах.
 (6)
(6)
Для проектирования используются номинальные значения указанных параметров, то есть такие, которые известны разработчику. Предполагается, что номинальные значения параметров принадлежат интервалам возможных изменений реальных параметров.

Рисунок 1 - Схема объекта без запаздывания и его аппроксимированной функции.

Рисунок 2 - Переходная характеристика объекта без запаздывания.

Рисунок 3 - Переходная характеристика аппроксимированной функции объекта.
Аппроксимируем по переходной характеристике строго устойчивую часть передаточной функции объекта без запаздывания при помощи апериодического звена с запаздыванием. При этом, величина запаздывания, полученная в результате аппроксимации, равняется  .
.
В результате получили аппроксимированную функцию объекта:
 (7)
(7)
Будем использовать для синтеза регулятора известную идею компенсации запаздывания, которая позволяет получить алгоритм управления на основании передаточной функции объекта, не содержащей запаздывания. При наличии неопределенности по величине запаздывания будем использовать простой метод приближенной компенсации, основанный наиспользовании корректирующего элемента  , который для объекта чистого запаздывания позволяет обеспечить астатизм и максимальную степень устойчивости системы в соответствии с желаемым движением. Введение этого корректирующего звена не обеспечивает полной компенсации так, чтобы знаменатель передаточной функции замкнутой системы не содержал запаздывания и оно там присутствует.
, который для объекта чистого запаздывания позволяет обеспечить астатизм и максимальную степень устойчивости системы в соответствии с желаемым движением. Введение этого корректирующего звена не обеспечивает полной компенсации так, чтобы знаменатель передаточной функции замкнутой системы не содержал запаздывания и оно там присутствует.
Регулятор 1 вычисляется по формуле:
 . (8)
. (8)
где  частота среза системы;
частота среза системы;
 малая постоянная времени.
малая постоянная времени.
Подставив свои значения параметров в формулу 9, получим:
 (9)
(9)
Регулятор 2 вычисляется по формуле:
 ,(10)
,(10)
где  ,
,  = 2 —варьируемые параметры регулятора.
= 2 —варьируемые параметры регулятора.

Подставив своизначения параметров в формулу 10, получим:
 (11)
(11)
Передаточная функция разомкнутой системы:
 ) (12)
) (12)
Строим систему регулятор + объект:

Рисунок 4 — Система регулятор + объект.
В блок Regulator вводим регулятор, а в блок Object - объект.
Переходные характеристики для передаточной функции разомкнутой системы с регулятором:

Рисунок 5 - Переходная характеристика объекта управления по заданию.
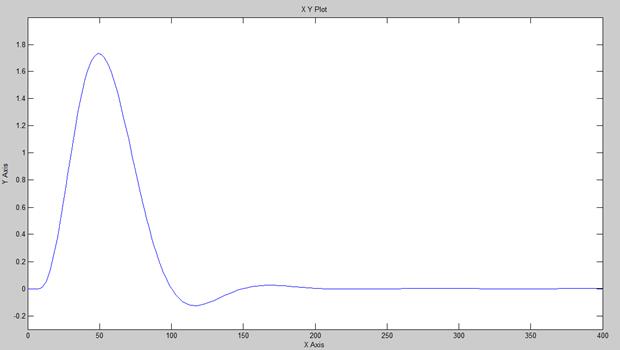
Рисунок 6 - Переходная характеристика объекта управления по возмущению на входе объекта.
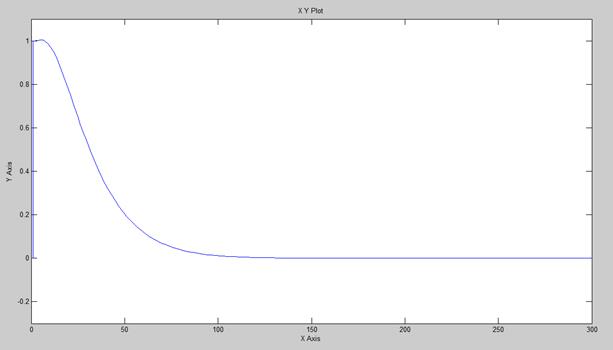
Рисунок 7 - Переходная характеристика объекта управления по возмущению на выходе объекта.
Переходные характеристики для передаточной функции разомкнутой системы с регулятором:

Рисунок 8 - Переходная характеристика объекта управления по заданию.

Рисунок 9 - Переходная характеристика объекта управления по возмущению на входе объекта.

Рисунок 10 - Переходная характеристика объекта управления по возмущению на выходе объекта.
Определим границы работоспособности, меняя коэффициент передачи  и построим переходные характеристики:
и построим переходные характеристики:
Для системы с регулятором 1:
1. Найдем коэффициент передачи, при котором в системе возникнут автоколебания.


Рисунок 11 - Система находится на границе устойчивости.

2. Далее, найдём коэффициент передачи, при котором переругулирование не будет превышать 30%.

Рисунок 12 - Перерегулирование не превышает 30 %, система остается устойчивой. 
Повторим то же самое для системы с регулятором:

Рисунок 13 - Система находится на границе устойчивости.


Рисунок 14 - Перерегулирование не превышает 30 %, система остается устойчивой.

Выводы по работе
В данной работе рассматривался объект:

Для данного объекта методом синтеза линейных систем с запаздыванием по критерию апериодической устойчивости были получены регуляторы:
1) 

–
Список используемой литературы
1. Фокин А.Л., Джарагян М.А. Синтез линейных систем с запаздыванием по критерию апериодической устойчивости: Метод. указания. - СПб.: СПбГТИ (ТУ). - 2004. - 15 с.
2. Фокин А.Л., Джарагян М.А. Проектирование линейных одноконтурных систем стабилизации: Метод. указания. -СПб.:СПбГТИ (ТУ). - 2004. - 21с.