КИНЕМАТИКА
 Равномерное движение – движение с постоянной скоростью (v = const, a = 0).
Равномерное движение – движение с постоянной скоростью (v = const, a = 0).


Здесь: x – конечная координата (м.),  – начальная координата (м.),
– начальная координата (м.),  – проекция скорости на ось координат (м/с), t – время (с), S – путь (м),
– проекция скорости на ось координат (м/с), t – время (с), S – путь (м),  – модуль скорости (м/с).
– модуль скорости (м/с).
 Равноускоренное движение – движение с постоянным ускорением (a = const)
Равноускоренное движение – движение с постоянным ускорением (a = const)
|
 – проекция начальной скорости на ось координат (м/с),
– проекция начальной скорости на ось координат (м/с),  – проекция ускорения на ось координат, t – время движения (с),a - ускорение (м/с2),
– проекция ускорения на ось координат, t – время движения (с),a - ускорение (м/с2),  - модуль начальной скорости (м/с),
- модуль начальной скорости (м/с),  - средняя скорость (м/с),
- средняя скорость (м/с),  - весь путь пройденный телом (м.), S – путь(м.),
- весь путь пройденный телом (м.), S – путь(м.),





Знак «+» - движение равноускоренное (скорость тела увеличивается)
Знак «-» - движение тела равнозамедленное (скорость тела уменьшается)
 Иногда в задачах требуется найти скорость одного тела, относительно другого. Относительную скорость мы так же можем находить из формул:
Иногда в задачах требуется найти скорость одного тела, относительно другого. Относительную скорость мы так же можем находить из формул:


Здесь:  - скорость первого тела относительно неподвижной системы отсчета,
- скорость первого тела относительно неподвижной системы отсчета,  – скорость второго тела относительно неподвижной системы отсчета,
– скорость второго тела относительно неподвижной системы отсчета,  - скорость второго тела относительно первого,
- скорость второго тела относительно первого,  - скорость первого тела относительно второго.
- скорость первого тела относительно второго.
Замечание: в формулах стоит векторная разность!
 Свободное падение – падение тел под действием силы тяжести
Свободное падение – падение тел под действием силы тяжести 
|
 – начальная координата (м.),
– начальная координата (м.),  – проекция начальной скорости на ось координат (м/с),
– проекция начальной скорости на ось координат (м/с),  - ускорение свободного падения (м/с2),
- ускорение свободного падения (м/с2), 



Знак «+» - движение равноускоренное (тело падает вниз)
Знак «-» - движение тела равнозамедленное (тело брошено вверх)
 ДИНАМИКА
ДИНАМИКА
Масса тела 
Здесь  – плотность (кг/м3 ),
– плотность (кг/м3 ),  – объем (м3)
– объем (м3)
Первый закон Ньютона:
 Существуют такие системы отсчета, называемые инерциальными, относительно которых тела движутся равномерно и прямолинейно или находятся в состоянии покоя, если на них не действуют другие тела или их действия скомпенсированы, или:
Существуют такие системы отсчета, называемые инерциальными, относительно которых тела движутся равномерно и прямолинейно или находятся в состоянии покоя, если на них не действуют другие тела или их действия скомпенсированы, или:
 = 0 → v = const
= 0 → v = const
Второй закон Ньютона:
 Сила, действующая на тело, равна произведению массы этого тела на ускорение, которое сообщает эта сила.
Сила, действующая на тело, равна произведению массы этого тела на ускорение, которое сообщает эта сила. 
Здесь: – равнодействующая сила (векторная сумма всех сил, приложенных к телу)
 Третий закон Ньютона:
Третий закон Ньютона:
 Тела действуют друг на друга с силами, направленными вдоль одной прямой, противоположными по направлению и равными по модулю.
Тела действуют друг на друга с силами, направленными вдоль одной прямой, противоположными по направлению и равными по модулю.

Здесь:  – сила с которой первое тело действует на второе,
– сила с которой первое тело действует на второе,  – сила с которой второе тело действует на первое.
– сила с которой второе тело действует на первое.
 Силы в механике:
Силы в механике:
1. Сила тяжести:  Направление: всегда вниз.
Направление: всегда вниз.
 |
2.  Сила тяготения:
Сила тяготения:  Направление: вдоль линии соединяющей центры масс
Направление: вдоль линии соединяющей центры масс
 |

3. Сила упругости  Направление: противоположно деформации пружины.
Направление: противоположно деформации пружины.
где k – жесткость пружины (Н/м),  - деформация (м)
- деформация (м)
Сила трения
4.1.Сила трения – покоя (находится из первого закона Ньютона). Всегда меньше силы трения скольжения. Направление: противоположно возможному движению тела.
4.2.  Сила трения – скольжения:
Сила трения – скольжения:  . Направление: противоположно движению тела.
. Направление: противоположно движению тела.
где μ – коэффициент трения (безразм.), зависящий только от материала, из которого изготовлены тела и степени их обработки, N – сила реакции опоры (Н).
5. Сила реакции опоры N (находится из законов Ньютона). Направление: перпендикулярно поверхности касания.
6. Сила натяжения нити Т (находится из законов Ньютона) Направление: вдоль нити.
7. Вес тела  – это сила, с которой тело действует на другие тела вследствие его притяжения к земле.
– это сила, с которой тело действует на другие тела вследствие его притяжения к земле.
 Если тело покоится, его вес: P = mg
Если тело покоится, его вес: P = mg
Если тело движется с ускорением: 
Механическая работа и энергия

 Работа А – скалярная физическая величина, измеряемая произведением модуля силы, действующей на тело, на модуль его перемещения под действием этой силы и на косинус угла между векторами силы и перемещения:
Работа А – скалярная физическая величина, измеряемая произведением модуля силы, действующей на тело, на модуль его перемещения под действием этой силы и на косинус угла между векторами силы и перемещения:

Здесь: 
 модуль перемещения тела, под действием силы
модуль перемещения тела, под действием силы  ,
,
 работа, которую совершила сила
работа, которую совершила сила 
 Мощность N (Вт.) – это количественная мера быстроты совершения работы. Мощность равна отношению работы ко времени за которое она совершена:
Мощность N (Вт.) – это количественная мера быстроты совершения работы. Мощность равна отношению работы ко времени за которое она совершена:

 Коэффициентом полезного действия механизма (КПД) η называют отношение полезной работы, совершенной механизмом, ко всей затраченной при этом работе.
Коэффициентом полезного действия механизма (КПД) η называют отношение полезной работы, совершенной механизмом, ко всей затраченной при этом работе.

Полезная работа – это та, которую нужно сделать, а затраченная – та, что приходится делать на самом деле.
Энергия E (Дж) – это количественная мера движения материи и взаимодействия ее видов.
Энергия – скалярная величина. Основное свойство энергии – взаимное превращение ее видов. Энергия может также превращаться в тепло и идти на совершение работы.
 |
 Кинетическая энергия
Кинетическая энергия  – это энергия, которой обладает тело вследствие своего движения. Кинетическая энергия равна половине произведения массы тела и квадрата его скорости:
– это энергия, которой обладает тело вследствие своего движения. Кинетическая энергия равна половине произведения массы тела и квадрата его скорости:

 Всякое движущееся тело обладает кинетической энергией. Кинетическая энергия - всегда положительная величина. Если под действием силы тело совершило перемещение и вследствие этого его скорость изменилась, то работа силы равна изменению кинетической энергии тела:
Всякое движущееся тело обладает кинетической энергией. Кинетическая энергия - всегда положительная величина. Если под действием силы тело совершило перемещение и вследствие этого его скорость изменилась, то работа силы равна изменению кинетической энергии тела:

Потенциальная энергия  – это энергия, которой обладает тело вследствие того, что находится в силовом поле или вследствие взаимодействия с другими телами.
– это энергия, которой обладает тело вследствие того, что находится в силовом поле или вследствие взаимодействия с другими телами.
 Потенциальная энергия тела поднятого над землей, прямо пропорциональна его массе и высоте:
Потенциальная энергия тела поднятого над землей, прямо пропорциональна его массе и высоте:

 Потенциальная энергия тела при упругой деформации равна половине произведения жесткости тела и квадрата его деформации:
Потенциальная энергия тела при упругой деформации равна половине произведения жесткости тела и квадрата его деформации:

 Полня механическая энергия тела – это сумма его потенциальной и кинетической энергий:
Полня механическая энергия тела – это сумма его потенциальной и кинетической энергий:

Закон сохранения энергии: полная энергия замкнутой системы сохраняется.
СТАТИКА
Статика – раздел механики, в котором изучаются условия равновесия тел.
 Моментом силы М (Н·м) называется произведение силы, действующей на тело, имеющее ось вращение, и плеча этой силы:
Моментом силы М (Н·м) называется произведение силы, действующей на тело, имеющее ось вращение, и плеча этой силы:

Плечо силы l (м)– это кратчайшее расстояние от оси вращения тела до линии действия силы.
Знак момента «+» или «-» выбирается в зависимости от направления, в котором сила вызывает вращение.
Простые механизмы
 Простые механизмы – это приспособления, служащие для преобразования силы.
Простые механизмы – это приспособления, служащие для преобразования силы.
Рычаг (рис.3) – жесткий стержень, имеющий ось вращения.
На рисунке:
 – силы приложенные к рычагу,
– силы приложенные к рычагу,
О – ось вращения рычага
 относительно точки О.
относительно точки О.

Условие равновесия рычага: 
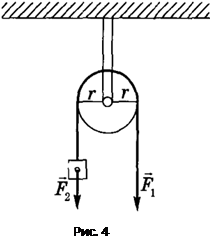 Неподвижный блок
Неподвижный блок
Неподвижный блок (рис.4) – рычаг с равными плечами, который изменяет направление действия силы, но не дает выигрыш в силе
На рисунке:  – плечи сил
– плечи сил 

Запишем условие равновесия: 
Из него следует, что  для неподвижного рычага.
для неподвижного рычага.

Неподвижный блок применяют, когда нужно изменить направление силы, не меняя ее величину.
Подвижный блок
Подвижный блок (рис.5) действует аналогично рычагу, плечи которого составляют:
 .
.

При этом условие равновесия имеет вид:  .
.
Откуда следует, что:  .
.
где F1 — приложенная сила, F2 — нагрузка.

Применение подвижного блока дает выигрыш в силе в два раза.
 |