По методу Л.В. Ассура любой механизм может быть образован последовательным присоединением к входному звену и стойке структурных групп (групп Ассура). Входное звено со стойкой образует так называемый механизм 1-го класса, или начальный механизм.
Структурной группой называется кинематическая цепь, которая после присоединения к стойке элементами внешних кинематических пар имеет нулевую степень подвижности.
Следовательно, структурная группа пространственного механизма должна удовлетворять условию
6 n – 5 р 5 – 4 р 4 – 3 р 3 – 2 р 2 – р 1 = 0. (1.3)
Для структурной группы плоского механизма это условие имеет вид:
3 n – 2 р 5 – р 4 = 0. (1.4)
Для структурной группы плоского рычажного механизма это выражение еще упрощается:
3 n – 2 р 5 = 0. (1.5)
Отсюда следует, что число звеньев плоской структурной группы с низшими парами всегда четное, а число пар кратно трем.
Простейшей и самой распространенной является группа второго класса, состоящая их двух звеньев и трех кинематических пар (одна внутренняя и две внешние).
В зависимости от сочетания вращательных и поступательных пар структурные группы второго класса имеют 5 модификаций.
Ниже приведены схемы групп 2-го класса (группы Ассура) всех видов и механизмы, образованные присоединением этих групп ко входному звену и стойке.
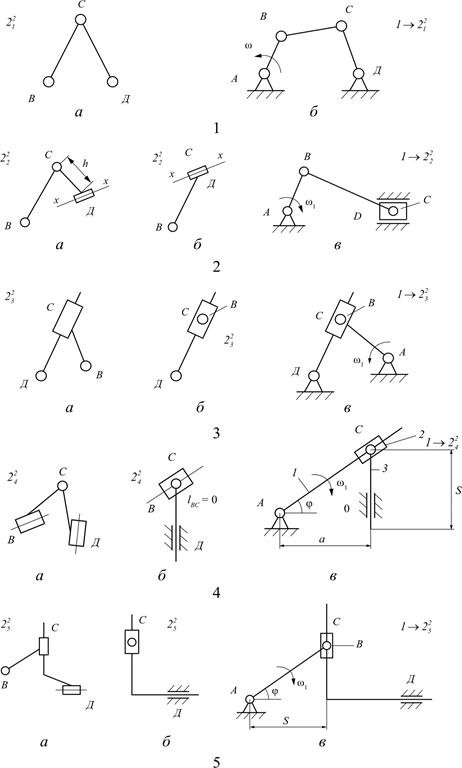
Рис. 1.7. Группы Ассура 2-го класса:
1. Шарнирный четырехзвенник: а – структурная группа  ; б – схема механизма.
; б – схема механизма.
2. Кривошипно-ползунный механизм: а, б – структурная группа  ; в – схема
; в – схема
механизма.
3. Кулисный механизм: а, б – структурная группа  ; в – схема механизма.
; в – схема механизма.
4. Тангенсный механизм: а, б – структурная группа  ; в – схема механизма.
; в – схема механизма.
5. Синусный механизм: а, б – структурная группа  ; в – схема механизма
; в – схема механизма
На рис. 1.8 показана последовательность построения структурной схемы сложного механизма строгального станка. Он образован присоединением к кривошипу 1 и стойке структурной группы 2-го класса третьего вида (звенья 2 и 3) и последующим присоединением к полученному кулисному механизму группы Ассура 2-го класса 2-го вида (звенья 4 и 5).
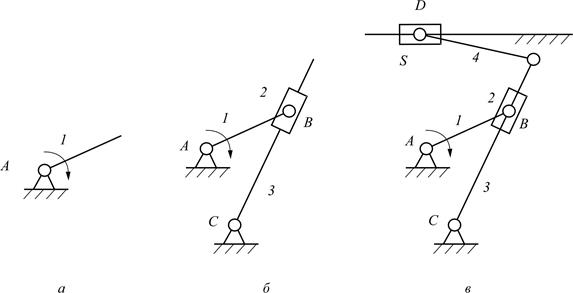
Рис. 1.8. Последовательность построения структурной схемы
сложного механизма: а – входное звено; б – кулисный механизм;
в – механизм строгального станака
На рис. 1.9, а показана структурная группа 3-го класса 3-го порядка, а на рис. 1.9, б – группа 4-го класса 2-го порядка. Они весьма редко применяются в технике.
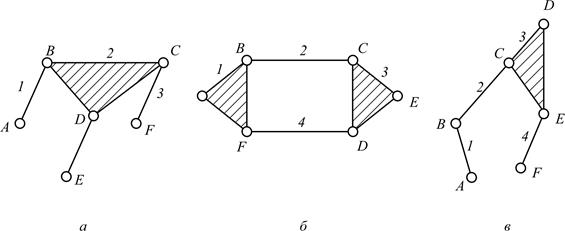
Рис. 1.9. Структурные группы 3-го класса 3-го порядка (а),
4-го класса 2-го порядка (б), соединение двух структурных групп 2-го класса (в)
Кинематическая цепь, приведенная на рис. 1.9, в, имеет W = 0, но это не структурная группа, а соединение двух групп 2-го класса: (1–2) + (3–4).
По предложению И.И. Артоболевского класс группы определяется числом внутренних кинематических пар, входящих в наиболее сложный замкнутый контур.
Порядок группы определяется числом внешних кинематических пар, которыми группа присоединяется к механизму. Все структурные группы 2-го класса имеют 2-й порядок.
Присоединение к механизму или отсоединение от него структурной группы, т.е. кинематической цепи с нулевой степенью свободы, не изменяет число степеней свободы механизма, а значит, сохраняется определенность в движении звеньев механизма. Присоединение или отсоединение кинематической цепи с числом степеней свободы, отличным от нуля, приведет к изменению числа степеней свободы механизма, и при прежнем числе заданных независимых движений не будет определенности в движении выходных звеньев.
Класс и порядок механизма определяются высшим классом и высшим порядком структурных групп, входящих в состав механизма.