В большинстве случаев для асинхронных двигателей с короткозамкнутым ротором используется пуск с помощью простых коммутирующих аппаратов – рубильников, автоматических выключателей и других устройств подобного рода. При прямом пуске двигателя кратность пускового тока высока, КП = 5,5…7. Такой кратковременный пусковой ток относительно безопасен для двигателя, но вызывает изменение напряжения в сети, что может неблагоприятно сказаться на других потребителях энергии, присоединенных к той же распределительной сети. По этим причинам номинальная мощность асинхронных двигателей, пускаемых прямым включением, зависит от мощности распределительной сети. В мощных сетях промышленных предприятий возможен прямой пуск двигателей с короткозамкнутым ротором мощностью до 1000 кВт и даже выше, но во многих случаях эта мощность не должна превышать 100 кВт.
Следует иметь в виду еще один недостаток пускового режима асинхронного двигателя с короткозамкнутой обмоткой ротора, для которого кратность пускового момента невелика (КПУСК = 1…2). При большом пусковом токе двигатель развивает относительно небольшой пусковой вращающий момент.
Улучшение пускового режима асинхронного двигателя сводится к уменьшению пускового тока, причем желательно, чтобы пусковой момент был бы возможно больше. С этой целью снижают напряжение питания обмоток статора, нормально работающих при соединении треугольником, меняют на соединение звездой. Используют конструктивные меры в самом двигателе (обмотку ротора выполняют в виде двойной беличьей клетки). Применяют также холостой пуск двигателя, когда его плавно нагружают с помощью муфты (фрикционной, электромагнитной, порошковой) после достижения определенной частоты вращения.
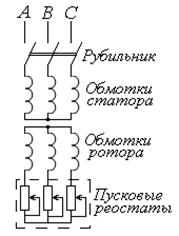
Условия пуска асинхронного двигателя с фазным ротором значительно лучше. Схема включения такого двигателя в сеть приведена на рисунке 4.5. Для получения максимального пускового вращающего момента пусковые реостаты вводят максимально. При максимальном скольжении (S ≈ 1) вращающий момент МПУСК будет иметь максимальное значение. Как только ротор начнет вращаться, скольжение станет уменьшаться, а вместе с ним ЭДС и ток ротора, что приведет к уменьшению вращающего момента. Чтобы вращающий момент нарастал, сопротивление пусковых реостатов нужно постепенно уменьшать. Когда двигатель разовьет номинальные обороты, пусковые реостаты выводят в нулевое положение, то есть замыкают накоротко.
|
| Рис.4.5 – Схема включения двигателя с фазным ротором |
Применение пусковых реостатов значительно улучшает пусковые условия асинхронного двигателя, увеличивая пусковой момент и уменьшая пусковой ток. Однако двигатель с фазным ротором дороже, его обслуживание сложнее, несколько ниже КПД и коэффициент мощности.
Для быстрой остановки двигателя или в случае использования асинхронного двигателя для торможения приводного механизма, например, при опускании груза подъемным устройством, применяется режим электромагнитного тормоза. Для перевода двигателя в этот режим применяется противовключение, то есть изменение порядка подключения к сети любых двух фаз обмотки статора. При этом направление вращения магнитного поля статора становится противоположным направлению вращения ротора и вращающий момент ротора будет направлен против внешнего механического момента (момента инерции или момента, создаваемого силой тяжести груза). Когда ротор останавливается, необходимо отключать двигатель от сети.
Для регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором используют частотное регулирование и регулирование изменением числа пар полюсов.
Частотное регулирование является наиболее перспективным методом управления частотой вращения асинхронного двигателя. Оно осуществляется путем изменения частоты f переменного тока в обмотках статора. Угловая скорость вращающегося магнитного поля статора пМ = 60 f / р пропорциональна частоте f. При этом возникает необходимость одновременно регулировать напряжение. Это связано с тем, что для сохранения постоянного вращающего момента двигателя необходимо выдерживать постоянство отношения U 2/f 2. В то же время мощность двигателя РВЫХ будет изменяться пропорционально частоте тока f.
Регулирование изменением числа пар полюсов осуществляется путем переключения числа пар р полюсов магнитного поля статора. При этом на статоре помещают две или больше независимых обмоток с разным числом пар полюсов: р1, р2 и так далее. Числа пар полюсов взаимно никак не связаны и могут быть любыми. Само регулирование сводится к скачкообразному изменению частоты пМ. Такой метод требует усложнения конструкции двигателя.
В трехфазных асинхронных двигателях с фазным ротором применяется реостатное регулирование частоты вращения. Данный метод осуществляется путем введения в цепь фазных обмоток ротора трехфазного регулирующего реостата, как и при пуске (Рис.4.5). Однако регулирующий реостат должен быть рассчитан на нагрузку, значительно большую чем при пуске.
4.4 Устройство и принцип действия синхронных
электрических машин
Синхронные машины используются в качестве генераторов переменного тока, электродвигателей и синхронных компенсаторов.
Синхронные генераторы гидроэлектростанций вращаются с помощью гидротурбин и носят название гидрогенераторов. Кроме электростанций синхронные генераторы находят применение в установках, требующих автономного источника питания (автомобили, передвижные электростанции, ветроустановки).
Синхронные двигатели переменного тока используются с механизмами средней и большой мощности при редких пусках, требующими постоянного рабочего вращающего момента. К таким механизмам относятся компрессоры, вентиляторы, насосы и так далее.
Синхронный компенсатор предназначается для улучшения коэффициента мощности электротехнических установок (компенсации индуктивной реактивной мощности).
Конструктивно синхронная машина состоит из статора и ротора. Статор аналогичен статору асинхронной машины, а ротор (Рис. 4.6) представляет собой многополюсный электромагнит, поле которого создается обмоткой возбуждения, по которой пропускается постоянный ток. Питание обмотки возбуждения осуществляется через скользящий контакт между контактными кольцами и неподвижными щетками. На рис.4.6 показан ротор синхронной машины с явно выраженными полюсами. Быстроходные машины могут иметь ротор с неявно выраженными полюсами. Особенностью синхронной машины является возможность работы как в режиме двигателя, так и в режиме генератора. Если за счет внешнего источника механической энергии механически вращать ротор, то частота ЭДС переменного тока в синхронной машине будет определяться частотой п вращения ротора и числом р пар полюсов, f = рп/60. Действующее значение ЭДС ЕС , индуктируемой в проводниках фазной обмотки статора, будет зависеть от магнитного потока ротора ФР, частоты его вращения п и конструктивных особенностей машины, учитываемых постоянным коэффициентом СЕ.
 (4.16)
(4.16)
Если обмотки статора запитать током от внешнего источника, то в статоре образуется вращающееся магнитное поле. При отсутствии внешнего вращающего момента взаимодействие вращающегося поля статора с магнитным полем ротора, питаемого постоянным током, вызывает появление вращающего момента, под воздействием которого ротор будет вращаться в том же направлении, что и магнитное поле статора.
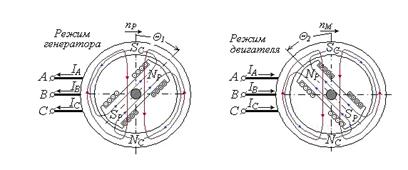
Схематично режимы работы синхронной машины, подключенной к сети, показаны на рис.4.7. В режиме генератора ось магнитных полюсов ротора будет повернута относительно оси полюсов статора на некоторый угол Θ1 ˂ 0 в направлении вращения. Магнитные полюсы ротора будут «тянуть» за собой полюсы статора. Такое отставание поля статора свидетельствует о наличии магнитного тормозящего момента, на преодоление которого затрачивается механическая энергия внешнего двигателя.

|
| Рис. 4.6 – Ротор синхронной машины: 1 – полюсы; 2 - полюсные катушки; 3 - сердечник; 4 – контактные кольца |
В результате происходит преобразование энергии механического движения внешнего двигателя в электрическую энергию генератора, которая будет поступать в сеть.
Если приложить к валу машины тормозящий момент механической нагрузки, то ось магнитных полюсов ротора будет отставать от от оси полюсов вращающегося поля статора на некоторый угол Θ2 > 0. Электромагнитные силы взаимодействия токов обмотки статора и магнитного поля ротора будут увлекать ротор в направлении вращения. Будет создаваться вращающий момент, посредством которого электрическая энергия сети преобразуется в механическую энергию, отдаваемую приводной машине.
|
| Рис. 4.7 – Режимы работы синхронной машины |
При использовании синхронной машины в качестве трехфазного генератора его активная мощность
PГ = 3ЕС I cosφ = 3RФ I2 + 3UIcosφ, (4.17)
где ЕС - ЭДС фазной обмотки статора; I – ток одной фазной обмотки; φ – угол сдвига фаз между ЭДС и ЕС и током I (с учетом влияния нагрузки); RФ – активное сопротивление одной фазной обмотки; U – напряжение на выводах фазной обмотки.
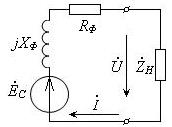
Схема замещения одной фазы статора, построенная согласно выражению (4.17), приведена на рис.4.8.
Учитывая, что cosφ практически всегда меньше единицы, номинальной мощностью генератора считается его полная мощность S = U I. Коэффициент полезного действия генератора (КПД) равен отношению его активной мощности РГ к подводимой механической мощности РМ первичного двигателя (паровой турбины, дизельного двигателя и др.):
η = РГ / РМ . (4.18)
|
| Рис. 4.8 – Схема замещения одной фазы статора |
Механическая мощность будет складываться из полезной мощности генератора и мощности потерь (РПОТ):
РМ = РГ + РПОТ .
Мощность потерь учитывает механические потери энергии (трение в подшипниках, трение воздуха и др.) и электрические потери: в обмотках возбуждения ротора; потери в стали магнитопроводов; потери в обмотках статора.
Механические потери и потери в обмотках возбуждения ротора носят постоянный характер, поэтому при снижении нагрузки генератора ниже номинальной его КПД и КПД первичного двигателя будут также снижаться.
Снижение cosφ также приводит к уменьшению КПД системы «первичный двигатель – генератор».
4.5 Вращающий момент и характеристики синхронных
электродвигателей
Электрическая мощность трехфазного синхронного двигателя может быть выражена, как
 (4.19)
(4.19)
где U и I – напряжение и ток в фазной обмотке статора; φ – сдвиг фаз между напряжением U и током I; ЕС - ЭДС фазной обмотки статора, противодействующая изменению тока I; Θ > 0 - угол отставания оси магнитных полюсов ротора от оси полюсов вращающегося поля статора; ХФ – индуктивное сопротивление фазной обмотки статора.
Электромагнитный момент, возникающий при взаимодействии магнитных полей статора и ротора, будет равен:
 (4.20)
(4.20)
где р – число пар полюсов магнитного поля статора; ω – угловая частота напряжения сети.
Так как РМЕХ = МЭМ ωР а ωР= ω / р, то механическая мощность двигателя
 (4.21)
(4.21)
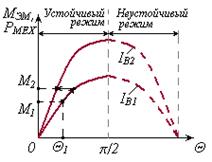
Сетевое напряжение U и частота ω постоянны. Тогда соотношения (14.5) и (14.6) будут выражать зависимости МЭМ = f(Θ) и РМЕХ = f(Θ). Эти зависимости называют угловыми характеристиками синхронного двигателя (Рис. 4.9).
Угловые характеристики позволяют анализировать процессы в синхронном двигателе при изменении нагрузки.
|
| Рис.4.9 – Угловые характеристики синхронного двигателя |
Так, например, при увеличении тормозящего момента угловая частота вращения ротора ωР начнет уменьшаться. Это приведет к увеличению угла Θ > Θ1, что при неизменном токе возбуждения IB1 приведет к увеличению электромагнитного момента МЭМ от значения М1 до значения М2 Момент М2 уравновесит действие внешнего тормозящего момента и двигатель будет вращаться с той же угловой скоростью ωР, но при значении угла Θ, более близком по величине к углу Θ = π /2. Однако, если посмотреть на характеристику МЭМ = f(Θ) при токе возбуждения IB1 (Рис.4.9), то можно предположить, что при дальнейшем увеличении нагрузки угол отставания вращения ротора Θ может превысить значение π /2 и двигатель выйдет из устойчивого режима работы и остановится. Чтобы иметь запас устойчивости двигателя по электромагнитному моменту при увеличенной нагрузке необходимо увеличить ток возбуждения, например, установить IB2 > IB1 (см. рис.4.9). Важной особенностью синхронного двигателя является возможность регулировать с помощью тока возбуждения не только запас устойчивости, но и влиять на реактивный ток статора. Зависимость IC = f(IB) при постоянном тормозном моменте называется U – образной характеристикой синхронного двигателя (Рис. 4.10).
Активная мощность Р синхронного двигателя изменяется при изменении тормозного момента (нагрузки). Если нагрузку увеличивать, то будет расти ток статора IC. Для сохранения устойчивой работы двигателя необходимо увеличивать ток возбуждения IB. При этом характер сопротивления обмоток статора для внешней сети будет изменяться от активно-индуктивного к
активно-емкостному (см. рис.4.10).

|
| Рис.4.10 – U -образная характеристика синхронного двигателя |
При значении тока IB = IB ГР сопротивление обмоток статора будет иметь чисто активный характер, когда сдвиг фаз между током в обмотках и питающим напряжением φ = 0 (cosφ = 1). Если на валу двигателя нет нагрузки, то, пренебрегая потерями, можно считать активную мощность Р = 0. В этом случае ток в статорных обмотках будет чисто реактивным (на рис.4.10 нижняя кривая). В таком режиме при IB > IB ГР двигатель может использоваться в качестве синхронного компенсатора – регулируемого емкостного элемента. Синхронные компенсаторы позволяют улучшать коэффициент мощности (cos φ) в электрической энергосистеме.
Пуск синхронного двигателя
Вращающий момент синхронного двигателя, возникающий в результате взаимодействия вращающегося магнитного поля статора с неподвижным возбужденным ротором, при пуске двигателя близок к нулю. Для того, чтобы синхронный двигатель начал работать, его ротор необходимо раскрутить до частоты вращения, близкой к асинхронной. Для асинхронного пуска синхронного двигателя используют разные приемы.
Пуск в два этапа: первый этап – асинхронный набор частоты вращения при отсутствии тока возбуждения и второй этап - втягивание в синхронное вращение после включения постоянного тока возбуждения. На первом этапе асинхронного пуска обмотка возбуждения отключается от источника постоянного тока и замыкается через пусковой резистор RП = (8…10)RB (RB – сопротивление обмотки возбуждения). На втором этапе включается питание обмоток возбуждения ротора постоянным током.
Использование дополнительной короткозамкнутой пусковой обмотки типа беличье колесо. В этом случае двигатель раскручивается как асинхронный. После достижения определенной частоты вращения включается ток возбуждения ротора и двигатель достигает частоты вращения пР = пМ. При такой частоте вращения ротора скольжение отсутствует и пусковая короткозамкнутая обмотка перестает создавать вращающий момент. Двигатель будет работать в синхронном режиме.
Использование дополнительного двигател я для раскрутки основного синхронного двигателя. Данный прием не требует особых пояснений. По причине большей сложности и повышенной стоимости оборудования применяется редко.
4.6 Электрические двигатели переменного тока
малой мощности
Синхронные двигатели малой мощности
В простых синхронных двигателях небольшой мощности роль электромагнита ротора может выполнять постоянный магнит, изготовленный из магнитотвердого материала. Пуск такого двигателя осуществляется непосредственным подключением фазных обмоток статора к питающей сети. Для возникновения асинхронного вращающего момента в момент запуска в полюсы постоянного магнита ротора встраиваются стержни короткозамкнутой обмотки.
В синхронных реактивных двигателях малой мощности ротор изготавливается анизотропным, то есть с различным магнитным сопротивлением в разных направлениях. За счет магнитной анизотропии ротора происходит искривление магнитных линий поля статора, что при наличии тормозного момента на валу двигателя приводит к появлению вращающего момента.
Такие двигатели имеют более низкий КПД, в них отсутствует возможность регулирования реактивной мощности и запаса устойчивости.
Однофазные коллекторные двигатели переменного тока
Если в обмотках якоря и в обмотках возбуждения коллекторного двигателя одновременно изменять направление тока, то направление вращающего момента меняться не будет. Это обстоятельство позволяет использовать коллекторные двигатели в сетях переменного тока. При этом сохраняется ценное свойство двигателей постоянного тока – возможность плавного и экономичного регулирования скорости вращения и вращающего момента. Однако конструкция коллекторного двигателя должна быть специально приспособлена к условиям работы при питании переменным током. Прежде всего необходимо уменьшить вихревые токи в магнитопроводе статора (станине) и уменьшить индуктивность обмотки якоря, которая снижает cos φ и ухудшает условия коммутации в коллекторе. Для уменьшения вихревых токов станина двигателя набирается из изолированных тонких листов электротехнической стали. С целью компенсации индуктивности обмотки якоря на станине двигателя располагают дополнительную компенсационную обмотку. Обмотка размещается равномерно вдоль окружности статора (станины) двигателя и соединяется последовательно с обмоткой якоря (ротора) двигателя. При этом добиваются, чтобы ток в проводниках компенсационной обмотки был по направлению противоположен току в противолежащих проводниках обмотки ротора.
Обеспечить хорошие условия коммутации в коллекторе весьма сложно. Для устранения реакции якоря такие двигатели, как и машины постоянного тока, снабжаются дополнительными полюсами. Но и эта мера не решает всех проблем. В коммутируемых секциях двигателя из-за периодического изменения магнитного потока статора возникает трансформаторная ЭДС, вызыва-ющая появление тока в секции, закороченной щеткой. Для уменьшения этого тока увеличивают сопротивление обмоток ротора, уменьшают количество витков коммутируемых секций, применяют обладающие большим сопротивлением угольные щетки и другие меры.
Изменение направления вращения в коллекторных двигателях осуществляется путем переключения обмоток возбуждения относительно обмоток якоря.
Однофазные коллекторные двигатели переменного тока широко используются в бытовых приборах, в ручном инструменте, в устройствах автоматики.
Двухфазные и однофазные асинхронные двигатели
Если у статора двигателя запитать только одну фазную обмотку, то вращающегося магнитного поля не получим. Если же статор двигателя будет содержать две обмотки, оси которых сдвинуты в пространстве на угол 90 градусов, и обеспечить питание этих обмоток токами, сдвинутыми по фазе на угол π/2, то получим суммарное вращающееся магнитное поле.
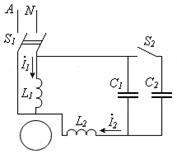
На этом принципе основана работа двухфазного асинхронного двигателя. Если одну обмотку питать непосредственно от сети, то вторую необходимо запитать через фазосдвигающее устройство, например, через конденсатор (Рис. 4.11). При пуске двигателя используют емкость двух параллельно соединенных конденсаторов С1+С2. Для этого перед включением рубильника S1 должен быть включен выключатель S2. Для лучших условий пуска емкость конденсаторов подбирают так, чтобы вращающееся магнитное поле статора было круговым. После запуска двигателя при номинальной нагрузке изменение тока второй обмотки вызовет изменение тока на конденсаторе, а, значит, и напряжение на второй обмотке изменится по величине и по фазе. Это приведет к изменению соотношения магнитных полей двух катушек. Результирующее магнитное поле станет эллиптическим, магнитный поток станет пульсирующим. При этом вращающий момент уменьшится. Этот недостаток устраняется путем уменьшения емкости фазосдвигающих конденсаторов за счет отключения конденсатора С2. Отключение может осуществляться при достижении необходимой частоты вращения (75…80% пНОМ) автоматически – с помощью центробежного выключателя, реле времени либо иным способом.
|
| Рис.4.11 – Включение двухфазного двигателя в сеть |
Двухфазные двигатели с регулируемой частотой вращения имеют вместо обычного короткозамкнутого ротора полый ротор в виде тонкостенного алюминиевого цилиндра, вращающегося в узком воздушном зазоре между статором и неподвижным центральным сердечником - внутренним статором. Частота вращения регулируется изменением действующего значения или фазы напряжения одной из обмоток. Такие двигатели имеют очень малую инерцию и используются при автоматическом регулировании ряда производственных процессов.
Однофазные асинхронные двигатели не развивают начального пускового момента. Однако, если ротор такого двигателя раскрутить в любую сторону, то он будет вращаться самостоятельно и может развивать значительный вращающий момент.
Задача пуска однофазного двигателя решается посредством применения дополнительной (пусковой) обмотки, рассчитанной на кратковременную нагрузку током и отключаемую по окончании пуска. Последовательно с этой обмоткой включается пусковой конденсатор или иное фазосдвигающее устройство.
5 Аппаратура управления и защиты силовых
и вспомогательных цепей
5.1 Коммутационные устройства и аппараты
Коммутация – это процесс, в результате которого происходит замыкание и размыкание цепей протекания токов в электрических устройствах и системах. Посредством коммутации осуществляется изменение режимов работы электрических цепей и их элементов. Осуществляется коммутация с помощью коммутационных устройств и аппаратов. Различают устройства и аппараты ручного управления, автоматические выключатели и аппараты дистанционного управления.
Аппараты ручного управления
К аппаратам ручного управления относятся рубильники, различного рода выключатели, переключатели, кнопочные станции и другие устройства.
Рубильники выпускают одно-, двух- и трехполюсные. Они имеют один, два, три неподвижных контакта (губки) и определенное число подвижных контактов (ножей), скрепленных траверсой из изолирующего материала и установленных на шарнирах. На траверсе имеется рукоятка для включения. Контактная система рубильников может быть выполнена с разрывными (дугогасящими) контактами и без них. Трехполюсные рубильники (Рис. 5.1) могут быть с центральной или боковой рукояткой, с боковым или центральным рычажным приводом.
Токоведущие части рубильника монтируют на основании, изготовленном из изоляционного материала: мрамора, шифера, пластмассы, асбоцемента или иного изоляционного материала. Для защиты обслуживающего персонала от возможного прикосновения к токоведущим частям и от действия электрической дуги рубильники закрывают защитными кожухами или помещают в закрытые ящики.
Рубильники применяют в сухих помещениях. На открытом воздухе, а также в сырых и пыльных помещениях рекомендуется использовать распределительные ящики, выпускаемые в металлических корпусах брызго- и пылезащищенного исполнения с встроенным в них трехполюсным рубильником и тремя предохранителями. Чтобы при включенном рубильнике ящик нельзя было открыть, на его крышке смонтировано блокировочное устройство.

|
| Рис. 5.1 – Трехполюсный рубильник |
Пакетные выключатели типа ПК (Рис. 5.2) устанавливают в сухих, непыльных и взрывобезопасных помещениях. Они предназначены для нечастого включения и выключения электродвигателей, осветительных приборов и других потребителей. Пакетные выключатели компактны; при напряжении 220 В и активной нагрузке отключаемые токи могут быть 6...100 А, а при 380 В - 6...60 А. Выключатели имеют специальную пружину, позволяющую быстро замыкать и размыкать цепь. При повороте их рукоятки натягивается пружина, под действием которой контакты замыкаются или размыкаются с большой скоростью. Пакетные выключатели снабжены искрогасительной фибровой шайбой. Под действием электрической дуги, возникающей при разрыве контакта, фибра выделяет газы (углекислый, водород и водяной пар), которые способствуют быстрому гашению дуги. В сырых помещениях и на открытом воздухе устанавливают герметичные пакетные выключатели.
Кроме пакетных выключателей широко применяют пакетные переключатели. В таких переключателях только одно положение соответствует отключенному состоянию приемника, а остальные два или три положения - включенному.

|
| Рис. 5.2 – Пакетный выключатель |
Кнопочные выключатели и кнопочные станции применяются для включения в работу трехфазных и однофазных электродвигателей и других потребителей энергии. В таких устройствах при нажатии на кнопку «Пуск» замыкаются все контакты и после прекращения нажатия остаются замкнутыми либо размыкаются. При нажатии на кнопку «Стоп» контакты выключателей размыкаются.
Штепсельные разъемы применяют для подключения к сети переносных и передвижных трехфазных и однофазных потребителей. Для подключения трехфазных потребителей применяют штепсельные разъемы, имеющие в розетке четыре гнезда, а в вилке - четыре штыревых контакта: три для соединения фаз, четвертый, более длинный, заземляющий. Розетку устанавливают на каком-либо основании (плите, стене) и подключают к сети. Вилку соединяют с потребителем. При замыкании контактов вилки с контактами розетки прежде всего замыкаются заземляющие контакты, благодаря чему корпус потребителя заземляется раньше, чем на него будет подано напряжение сети.
Электромагнитные реле, контакторы
и магнитные пускатели
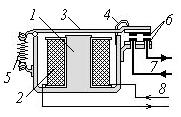
Электромагнитное реле – это электромеханический аппарат, обеспечивающий коммутацию в электрической цепи за счет подачи на его электромагнитную систему управляющего тока или напряжения. Схематическое устройство электромагнитного реле показано на рис. 5.3. Основными элементами реле являются: совмещенный с корпусом электромагнит, содержащий ферромагнитный сердечник 1 и обмотку 2; якорь 3 – пластина из магнитомягкого материала, шарнирно связанная с корпусом; ограничитель 4 и пружина 5, фиксирующие положение якоря и группа контактов 6, обеспечивающая замыкание и размыкание внешней коммутируемой цепи 7.
Электромагнит и якорь образуют электромагнитную систему реле, которая управляется путем подачи электрического тока на обмотку электромагнита через выводы 8.
|
| Рис. 5.3 – Электромагнитное реле |
Пока ток через обмотку реле не идет, якорь под действием пружины находится на некотором расстоянии от сердечника, и контакты внешней цепи разомкнуты. Как только в обмотке появляется ток, появляется магнитное поле катушки. Сердечник намагничивается и притягивает якорь. Подвижные контакты контактной группы прижимаются к неподвижным контактам и внешняя цепь замыкается. При прекращении тока в обмотке магнитное поле исчезает, сердечник размагничивается, пружина приподнимает якорь, и контакты внешней цепи размыкаются.
Существует множество различных конструкций электромагнитных реле. Многие реле имеют не одну, а несколько групп контактов. Различают реле с нормально разомкнутыми, нормально замкнутыми и перекидными контактами. Нормально разомкнутые контакты при отсутствии тока в обмотке реле разомкнуты (Рис. 5.3). Нормально замкнутые контакты, наоборот, при отсутствии тока в обмотке замкнуты, а при срабатывании реле они размыкаются. У перекидных контактов подвижные (средние) контакты, связанные якорем, при отсутствии тока замкнуты с одними неподвижными контактами, а при срабатывании реле «перекидываются» и замыкают цепь с другими неподвижными контактами.
В зависимости от назначения электромагнитные реле имеют разные конструкции корпусов и якорей, контактов, различные данные обмоток.
Основным параметром реле является его чувствительность – величина тока обмотки, при которой реле срабатывает. Чем меньше эта величина, тем реле чувствительнее. Реле характеризуется и величиной тока внешней цепи, коммутируемого контактами. Обычно контакты реле рассчитываются на относительно небольшие токи и напряжения.
Электромагнитные реле применяют для включения и отключения приемников малой мощности и в качестве промежуточного элемента для усиления и размножения электрического сигнала.
Контактор – это электромагнитный выключатель, управляемый цепью оперативного тока. Конструктивно и по принципу действия контакторы подобны электромагнитным реле (15.1). В отличие от реле, контакторы рассчитываются на коммутирование больших токов, иногда при относительно высоком напряжении. Они применяются для управления потребителями электроэнергии достаточно большой мощности, такими как электродвигатели, нагревательные устройства. В контакторах, помимо главной коммутируемой цепи, имеются также контакты цепи оперативного тока - так называемые вспомогательные контакты, служащие для выполнения вспомогательных операций управления.
Контакторы, как и электромагнитные реле, могут конструктивно выполняться для работы в сетях постоянного тока либо для использования в сетях переменного тока. Главное их отличие состоит в конструкции магнитных систем. Для снижения нагрева от вихревых токов в аппаратах переменного тока подвижные и неподвижные детали магнитных систем набираются из тонких пластин электротехнической стали. Контактор переменного тока является основной частью магнитного пускателя.
|
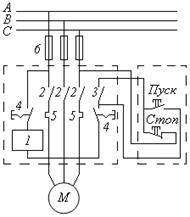
| Рис. 5.4 – Схема нереверсивного магнитного пускателя |
Магнитные пускатели относятся к аппаратам дистанционного автоматического управления. Конструктивно магнитный пускатель представляет собой комплектное устройство управления, состоящее из одного или нескольких электромагнитных контакторов, тепловых реле и кнопок управления. На рис. 5.4 показана схема нереверсивного магнитного пускателя переменного тока. Управление пускателем осуществляется двумя кнопками - «Пуск» и «Стоп». При нажатии кнопки «Пуск» замыкается цепь оперативного тока - от провода фазы А сети через контакты 4 теплового реле 5, через катушку 1 контактора, через контакты 4 другого теплового реле 5, через контакты кнопок «Пуск» и «Стоп» к проводу фазы С сети. Под действием оперативного тока содержащий катушку 1 электромагнит трехполюсного контактора притянет подвижный якорь. С последним жестко соединены главные подвижные 2 и вспомогательные контакты 3 в цепи оперативного тока. Когда замкнутся все эти контакты, двигатель М будет пущен в ход.
При отпускании кнопки «Пуск» протекание оперативного тока через катушку 1 контактора будет обеспечиваться за счет замкнутых вспомогательных контактов 3. Остановка двигателя обеспечивается путем нажатия кнопки «Стоп». Если двигатель перегружен, потребляемый ток будет больше номинального тока, то произойдет срабатывание теплового реле 5. Контакты 4 теплового реле разомкнутся и цепь оперативного тока через катушку 1 контактора разорвется, главные 2 и вспомогательные контакты 3 разомкнутся и двигатель остановится.
Вследствие значительной тепловой инерции тепловые реле не обеспечивают защиту от токов короткого замыкания, поэтому для защиты от внезапных коротких замыканий в цепи главного тока должны быть установлены плавкие предохранители 6.
Магнитный пускатель, по сравнению с другими аппаратами управления, имеет ряд преимуществ. Он дает возможность осуществлять дистанционное управление электроустановками. При помощи теплового реле обеспечивает защиту электроустановки от перегрузок и обеспечивает нулевую защиту, то есть при исчезновении в сети напряжения или его снижении до 80...70 % от номинального магнитный пускатель отключается. После восстановления напряжения потребитель электрической энергии остается отключенным.
5.2 Защитные аппараты
При коротких замыканиях ток в цепи возрастает в десятки и сотни раз. В подводящих проводниках может выделиться очень большое количество тепловой энергии (WT = I 2t). Изоляция проводов может воспламениться, а сам провод может расплавиться. Короткое замыкание в цепи может также привести к выходу из строя источника – трансформатора или генератора. Для защиты низковольтных (до 1000В) сетей и электроустановок от токов короткого замыкания служат плавкие предохранители и автоматические выключатели.
Плавкие предохранители
Наиболее распространены пробочные и трубчатые предохранители. Осветительные установки и другие установки небольшой мощности защищают пробочными предохранителями (Рис.5.5). Основную защитную функцию в пробочном предохранителе выполняет плавкая вставка (проволочка из легкоплавкого метала), впаянная между контактами патрона пробки. Если ток через плавкую вставку превышает расчетное (номинальное) значение, то вставка расплавляется или сгорает и цепь протекания тока через весь предохранитель прерывается.

|
| Рис. 5.5 – Пробочный предохранитель: 1 – цоколь; 2 – пробка; 3 - плавкая вставка; 4 – контактный винт |
Для защиты силовых установок применяют также трубчатые предохранители с закрытыми фибровыми, фарфоровыми или стеклянными патронами. Основным элементом таких устройств является калиброванная плавкая вставка, выполненная из легкоплавкого сплава. При перегорани