ИССЛЕДОВАНИЕ СТАТИСТИЧЕСКОЙ ХАРАКТЕРИСТИКИ АКСЕЛЕРОМЕТРА ТИПА БДЛУ–0,5
ТЕОРЕТИЧЕСКИЕ СВЕДЕНЬЯ
Приборы, предназначенные для измерения линейных ускорений летательных аппаратов и угловых ускорений вращающихся элементов их агрегатов, называются акселерометрами.
Сигналы акселерометров используются в инерциальных навигационных системах для вычисления скоростей и координат, в системах управления полетом и двигателями, а также в указателях визуальных приборов. Визуальные приборы индикации ускорений нужны летчику на маневренных самолетах для контроля перегрузок, возникающих при управлении самолета.
Акселерометры классифицируются по различным признакам, в частности, по областям применения, виду подвесов чувствительного элемента, способу снятия сигналов, числу измеряемых компонентов ускорения, по виду выходного сигнала и др.
Требования к акселерометрам в отношении точности измерения определяются областью применения. Так, погрешности акселерометров в инерциальных системах не должно превышать 0,001%. Акселерометры, используемые в системах управления, имеют погрешности 0,001-1,0%. Погрешности акселерометров, применяемых в качестве визуальных приборов, составляют 1–3%.
Принцип действия акселерометра состоит в следующем.
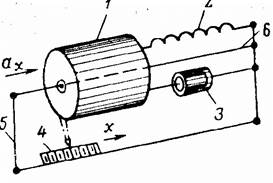
Рис.1 Схема акселерометра.
1 – инерционная масса; 2 – пружина; 3 – демпфер; 4 – шкала; 5 – корпус прибора; 6 – ось чувствительности акселерометра
Инерционная масса 1, связанная с корпусом прибора 5 при помощи пружины 2и демпфера 3, может перемещаться в направлении оси 6называемой осью чувствительности. Перемещение массы по отношению к корпусу прибора, отсчитываемое по шкале 4, пропорционально измеряемому ускорению, направленному по оси чувствительности.
Чувствительным элементом акселерометра является инерционная масса.
На инерционную массу  акселерометра действуют следующие силы:
акселерометра действуют следующие силы:
– сила инерции
 ,
,
где  – перемещение массы по отношению к корпусу прибора;
– перемещение массы по отношению к корпусу прибора;
 – перемещение корпуса прибора относительно фиксированной точки пространства.
– перемещение корпуса прибора относительно фиксированной точки пространства.
– сила, пропорциональная скорости движения массы и создаваемая демпфером:
 ,
,
где  – коэффициент демпфирования.
– коэффициент демпфирования.
– позиционная сила, создаваемая упругостью пружины:
 ,
,
где  – коэффициент упругости.
– коэффициент упругости.
Сумма этих сил равна нулю, т.е.
 ,
,
или
 ,
,
где  – собственная частота;
– собственная частота;
 ;
;
 – коэффициент относительного затухания.
– коэффициент относительного затухания.
Основными элементами акселерометров являются подвесы инерционных масс, датчики сигналов перемещения массы, моментные (силовые) устройства, обеспечивающие ввод сигналов обратной связи, усилители сигналов и корректирующие устройства (демпферы).
Для того чтобы акселерометр реагировал только на ту составляющую ускорения, для измерения которой он предназначен, его инерционная масса должна иметь специальный подвес, удовлетворяющий следующим требованиям: 1) минимальное трение в осях подвеса; 2) отсутствие перекрестных связей между измерительными осями; 3) обеспечение линейной зависимости между отклонениями инерционной массы и измеряемым ускорением.
Подвесы на простых опорах создают значительное трение, которое снижает чувствительность акселерометра. Для уменьшения трения чувствительный элемент укрепляют на рычаге или помещают в жидкость с удельным весом, равным удельному весу чувствительного элемента (рис. 2–4). Подвесы на пружинах и гофрированных упругих мембранах свободны от трений, однако недостатком их является то, что при отклонении массы прибор начинает реагировать на составляющие ускорения, перпендикулярные к оси чувствительности. Поэтому такие подвесы применяют в акселерометрах с силовой компенсацией, когда отклонения массы практически отсутствуют.
Рис. 2. Схема однокомпонентного акселерометра:
1 – инерционная масса; 2 – корпус; 3 – жидкость; 4 – направляющий стержень; 5 – усилитель; 6 – индуктивный датчик перемещения;
7 – электромагнитный привод
На схеме рис. 2 инерционная масса 1 подвешена на направляющей 4. Для уменьшения трения о направляющую масса 1, помещенная в жидкость 3, имеет нейтральную плавучесть, что исключает сильное прижатие к направляющей. Сигналы в рассматриваемой схеме, пропорциональные перемещению инерциальной массы, измеряются индуктивным датчиком 6. После усиления в усилителе 5 сигнал поступает на электромагнитный (силовой) привод 7. Выходным сигналом акселерометра является падение напряжения  на сопротивлении
на сопротивлении  , включенном последовательно в цепь обмотки силового привода. Демпфирование в приборе получается за счет сопротивления при движении инерциальной массы в жидкости. В акселерометрах рассматриваемого типа можно получить высокую собственную частоту и малую зону нечувствительности (достигается уменьшением сил трения за счет взвешивания инерциальной массы в жидкости). Для сохранения постоянства характеристик акселерометра необходимо поддерживать температуру жидкости постоянной, что достигается термостатированием.
, включенном последовательно в цепь обмотки силового привода. Демпфирование в приборе получается за счет сопротивления при движении инерциальной массы в жидкости. В акселерометрах рассматриваемого типа можно получить высокую собственную частоту и малую зону нечувствительности (достигается уменьшением сил трения за счет взвешивания инерциальной массы в жидкости). Для сохранения постоянства характеристик акселерометра необходимо поддерживать температуру жидкости постоянной, что достигается термостатированием.
Рис. 3. Схема маятникового поплавкового акселерометра:
1 – инерционная масса; 2 – жидкость; 3 – корпус; 4 – моментный двигатель;
5 – усилитель; 6 – датчик сигнала
На рис. 3 приведена схема маятникового поплавкового акселерометра. Поплавок (инерционная масса) конструируется так, чтобы его вес Q был близок к подъемной силе F. Необходимая маятниковость поплавка обеспечивается смещением центра тяжести относительно центра водоизмещения на величину L Сигнал поворота поплавка измеряется индуктивным датчиком 6, и после усиления в усилителе 5 поступает на моментный двигатель 4. Малое трение в опорах, являющихся подвесами, обеспечивается малым давлением, поскольку вес поплавка Q практически уравновешивается подъемной силой F. Демпфирование достигается тем, что масса движется в жидкости. Для сохранения постоянства характеристик прибора необходимо регулировать температуру жидкости. В поплавковых акселерометрах применяют кремниевые жидкости.
Ускорения, измеряемые акселерометрами, применяемыми в инерциальных системах, служат для получения скорости полета и пройденного расстояния. Для получения скорости ускорение интегрируется один раз, а для получения пути — дважды. Имеется определенный класс акселерометров, в которых выходной сигнал пропорционален не ускорению, а одно- или двукратному интегралу от ускорения.
Рис.4 Схема интегрирующего акселерометра
1-инерционный поплавок; 2-приводно двигатель; 3-гидравличесие перепускные каналы; 4-емкостной датчик; 5-цилиндр, заполненный силиконовой жидкостью; 6-реле системы обогрева; 7-термостат; 8-нагревательный элемент; 9-наружный цилиндр; 10-жидкость
Схема интегрирующего акселерометра поплавкового типа представлена на рис. 4. Поплавок 1 в форме цилиндра помещается в цилиндрической камере, заполненной жидкостью 10, причем плотность материала поплавка меньше плотности жидкости. Камера приводится во вращение двигателем 2 с постоянной скоростью. Под действием центробежных сил, возникающих при вращении жидкости, поплавок устанавливается по оси симметрии, вдоль которой он может перемещаться. Интегрирующие акселерометры с конструкцией, приведенной на рис. 4 имеет чувствительность порядка 10-5g и погрешность не более 0,01%.
Перспективными являются электромагнитные и криогенные подвесы.
Для преобразования перемещений в электрические сигналы в акселерометрах применяются потенциометрические, индуктивные, емкостные, фотоэлектрические и струнные преобразователи. Основные требования к преобразователям следующие: 1) большая разрешающая способность; 2) линейная зависимость выхода от входа; 3) отсутствие реакции преобразователя на чувствительный элемент. Этим требованиям не удовлетворяют потенциометрические датчики, поэтому в точных приборах они не применяются.
В качестве моментных (силовых) устройств в акселерометрах для ввода сигналов обратных связей применяются моментные двигатели (электродвигатели, работающие в заторможенном режиме) и электромагнитные устройства.
Для получения акселерометров с требуемыми частотными характеристиками в цепях обратной связи применяют корректирующие фильтры и специальные демпферы. В приборах с жидкостным подвесом для демпфирования используется вязкость самой жидкости.
Погрешности акселерометров
Акселерометрам присущи методические и инструментальные погрешности.
Методические погрешности акселерометров можно разделить на две группы: 1) погрешности, возникающие из-за того, что акселерометры измеряют только ускорения от активных сил, тогда как на ускорения, вызванные гравитационными силами, эти приборы не реагируют; 2) погрешности, возникающие из-за несовпадения оси чувствительности с направлением действия измеряемого ускорения.
Так, например, при несовпадении оси чувствительности и направления ускорения в 1° погрешность в измерении величины ускорения составляет 0,02%. Эта погрешность сама по себе мала и не представляет большого интереса. Большее значение имеет угол между указанными направлениями, поскольку он определяет несовпадение приборной и истинной осей системы координат. Кроме того, в инерциальных системах навигации несовпадение осей чувствительности с направлением измеряемых ускорений приводит к появлению перекрестных связей между акселерометрами, в результате чего акселерометр измеряет не только «свое», но и «чужие» ускорения.
Инструментальные погрешности акселерометров определяются: 1) порогом чувствительности (обусловленным трением в подвесах) — минимальным сигналом на входе, при котором появляется сигнал на выходе; 2) нарушением линейной зависимости между входным и выходным сигналами; 3) гистерезисом в характеристиках упругих и других элементах; 4) температурной зависимостью параметров и характеристик акселерометра.
Для уменьшения инструментальных погрешностей применяются меры по уменьшению трения в подвесах, по термостатированию элементов и по улучшению характеристик чувствительности акселерометра. В лучших конструкциях акселерометров для инерциальных систем инструментальные погрешности доведены до 0,002%.
Блок датчика линейных ускорений БДЛУ – 0,5 предназначен для измерения линейных ускорений относительно нормальной системы координат и выдачи электрического сигнала пропорционального линейным ускорениям в бортовой пилотажный комплекс (БПК) и другие бортовые системы.
Конструктивно акселерометр типа БДЛУ состоит из основных узлов:
– датчик линейных ускорений типа ДЛУВ-42 является одноосевым акселерометром и предназначен для измерения линейного ускорения, действующего вдоль оси чувствительности и выдачи электрического сигнала, величина напряжения которого пропорциональна линейному ускорению, действующему по измерительной оси, а знак соответствует направлению действия линейного ускорения.
– блока питания типа МУБП–1–1;
– усилителя обратной связи типа БУ–44–2–11.
Внешний вид БДЛУ представлен на рис.5

Рис.5 Внешний вид БДЛУ
Схема одноосевого акселерометра показана на рис.6.(типа ДЛУВ-42)
Рис. 6. Схема одноосного акселерометра с силовой обратной связью:
1 – обмотка датчика; 2 – обмотка возбуждения; 3 – ось чувствительности акселерометра; 4 – постоянный магнит; 5 – восстанавливающая  обмотка; 6 – усилитель переменного тока; 7 – демодулятор; 8 – фазосдвигающая цепочка; 9 – усилитель постоянного тока; 10 – генератор цепи возбуждения; 11 – выходное сопротивление; 12 – сигнал измеряемого ускорения.
обмотка; 6 – усилитель переменного тока; 7 – демодулятор; 8 – фазосдвигающая цепочка; 9 – усилитель постоянного тока; 10 – генератор цепи возбуждения; 11 – выходное сопротивление; 12 – сигнал измеряемого ускорения.
Акселерометр представляет собой устройство с силовой обратной связью, в котором сила инерции, действующая на чувствительный элемент, уравновешивается (пропорционально ускорению) электромагнитной силой, создаваемой током в катушке, помещенной в магнитное поле.
Чувствительным элементом акселерометра ДЛУВ является маятник 4, который представляет собой постоянный магнит.
При действии линейных ускорений, направленных вдоль чувствительной оси датчика возникает момент инерции, отклоняющий чувствительный элемент (маятник) от нулевого положения равновесия в направлении, обратном действию этой силы.
Момент инерции маятника равен:
 ,
,
где  – масса маятника;
– масса маятника;  – плечо небаланса маятника;
– плечо небаланса маятника;  – действующее линейное ускорение.
– действующее линейное ускорение.
Любое его отклонение относительно нулевого положения при этом создаёт в укреплённой на нём катушке датчика 1 э.д.с., пропорциональна величине действующей силы, а значит и ускорению. Сигнал с датчика поступает на вход амплитудного фазочувствительного детектора-усилителя БУ–44–2–11 (7, 8, 10), где преобразуется в напряжение постоянного тока определенной полярности и через усилитель постоянного тока УПТ – 9 подается на обмотки восстанавливающей катушки 5, которая расположена на упругой подвеске чувствительного элемента.
Магнитное поле восстанавливающей катушки 5 взаимодействует с полем постоянного магнита 4, который является маятниковым чувствительным элементом датчика, при этом возникает электромагнитная сила, уравновешивающая момент инерции маятника и стремящаяся вернуть его в нулевое положение.
Электромагнитный вращающий момент, создаваемый током, протекающим по обмоткам восстанавливающей катушки равен
 ,
,
где  - передаточный коэффициент цепи силовой обратной связи;
- передаточный коэффициент цепи силовой обратной связи;
 - ток, протекающий по катушке.
- ток, протекающий по катушке.
Введение в акселерометр силовой обратной связи эквивалентно дополнительной жесткости, которая намного больше по величине, чем жесткость упругого элемента.
Если коэффициент усиления усилителя 9 достаточно большой, то электромагнитная восстанавливающая сила уравновешивает силу, пропорциональную ускорению и чувствительный элемент примет нулевое положение равновесия, при этом будет иметь место равенство:
 или
или  ,
,
Отсюда имеет место соотношение
 .
.
Таким образом, в цепи восстанавливающей катушки 5 протекает ток, который прямо пропорционален действующему линейному ускорению (перегрузке).
Включив последовательно с катушкой сопротивление нагрузки  , получаем напряжения на выходе, пропорциональное действующему линейному ускорению:
, получаем напряжения на выходе, пропорциональное действующему линейному ускорению:
 . (1)
. (1)