Ствол является важной составной частью электромагнитного ускорителя. При этом он должен обладать рядом свойств:
1. Прочность.
Прочность ствола у ускорителя не является критичным параметром, тем не менее, при протекании импульсных токов через ускоряющие катушки развиваются механические напряжения. Прочность особенно существенна для многоступенчатых систем с повышенной длиной ствола.
2. Толщина.
Толщина стенок ствола должна быть минимальна. Это требование вытекает из того факта, что чем плотнее сердечник подогнан по диаметру к внутреннему диаметру ускоряющей катушки, тем больше его потокосцепление с катушкой (т.е. тем большая часть поля, создаваемого катушкой, проходит через сердечник).
3. Электропроводность и ферромагнетизм.
Материал ствола должен быть плохо проводящим и не являться ферромагнетиком. Это требование вытекает из того факта, что проводящий и особенно ферримагнитный материал ствола будет сильно ослаблять переменное магнитное поле, под действием которого в устройстве происходит ускорение снаряда.
4. Лёгкость в обработке.
Материал ствола должен легко обрабатываться (пилиться, сверлиться и т.д.), т.к. на нём размещается множество элементов конструкции (ускоряющие катушки, индуктивные или оптические датчики положения и т.д.).
5. Дешевизна и доступность.
Немаловажные факторы, особенно для любительских исследований, ведь приходится перепробовать множество стволов разного калибра и длины.
Основываясь на этом наборе параметров, мы провели эксперименты на одной ступени ускорителя по выбору материала ствола. В ходе промежуточных экспериментов не было выявлено существенных различий в свойствах куска ствола изготовленного из бумаги промазанной эпоксидным клеем и куска изготовленного из латуни. Исходя из этого, остановились на латунном стержне ввиду его большей прочности, доступности и простоты обработки.
Силовая часть.

 В неё входят семь ускоряющих катушек, банк конденсаторов, схема развязки напряжения для конденсаторов, а также схема гашения обратного напряжения на конденсаторах. Схема развязки состоит из последовательно RD цепочки. Резистор должен ограничивать ток, проходящий через диод, тем самым, защищая его от токового пробоя при быстрой зарядке конденсатора. Схема гашения обратного напряжения так же состоит из RD цепочки. Эта схема позволяет защитить конденсатор от обратного напряжения. Обратное напряжение на конденсатор попадает из-за ЭДС самоиндукции катушки и может его повредить.
В неё входят семь ускоряющих катушек, банк конденсаторов, схема развязки напряжения для конденсаторов, а также схема гашения обратного напряжения на конденсаторах. Схема развязки состоит из последовательно RD цепочки. Резистор должен ограничивать ток, проходящий через диод, тем самым, защищая его от токового пробоя при быстрой зарядке конденсатора. Схема гашения обратного напряжения так же состоит из RD цепочки. Эта схема позволяет защитить конденсатор от обратного напряжения. Обратное напряжение на конденсатор попадает из-за ЭДС самоиндукции катушки и может его повредить.
Контроллер.
 Схема питается от источника 5В. Чтобы открыть тиристор, на него разряжается конденсатор. Таким способом достигается достаточный ток для открытия тиристора. Светодиод еще и служит в качестве индикатора прохождения снаряда в ступени и соответственно срабатывания ступени. В составе микросхемы 74HC14 шесть триггеров Шмидта с инверсией на выходе. Чтобы на выходе микросхемы появилась логическая 1 (закрыт транзистор) нужно закоротить ее вход на землю. Это достигается с помощью фототранзистора. Если фототранзистор освещен на выходе микросхемы присутствует логическая 1, что не дает транзистору разрядить конденсатор и открыть тиристор. Как только снаряд перекрывает свет к фототранзистору, его сопротивление резко возрастает и уже на выходе микросхемы присутствует логический 0, который и открывает транзистор. Далее через транзистор разряжается конденсатор, тиристор открывается и катушка "зажигается".
Схема питается от источника 5В. Чтобы открыть тиристор, на него разряжается конденсатор. Таким способом достигается достаточный ток для открытия тиристора. Светодиод еще и служит в качестве индикатора прохождения снаряда в ступени и соответственно срабатывания ступени. В составе микросхемы 74HC14 шесть триггеров Шмидта с инверсией на выходе. Чтобы на выходе микросхемы появилась логическая 1 (закрыт транзистор) нужно закоротить ее вход на землю. Это достигается с помощью фототранзистора. Если фототранзистор освещен на выходе микросхемы присутствует логическая 1, что не дает транзистору разрядить конденсатор и открыть тиристор. Как только снаряд перекрывает свет к фототранзистору, его сопротивление резко возрастает и уже на выходе микросхемы присутствует логический 0, который и открывает транзистор. Далее через транзистор разряжается конденсатор, тиристор открывается и катушка "зажигается".
Преобразователь.
Классический «обратноходовый» преобразователь, построенный на микросхеме UC3845 (ШИМ контроллер с мощным полевым тразистором на выходе) и низковольтном силовом ключе IRF3205. Рассчитан стандартно по даташиту на микросхему, частота работы преобразователя порядка 15кГц, импульсный трансформатор намотан на броневом сердечнике Ч36. Мощность преобразователя около 25 вт.

Индикация.
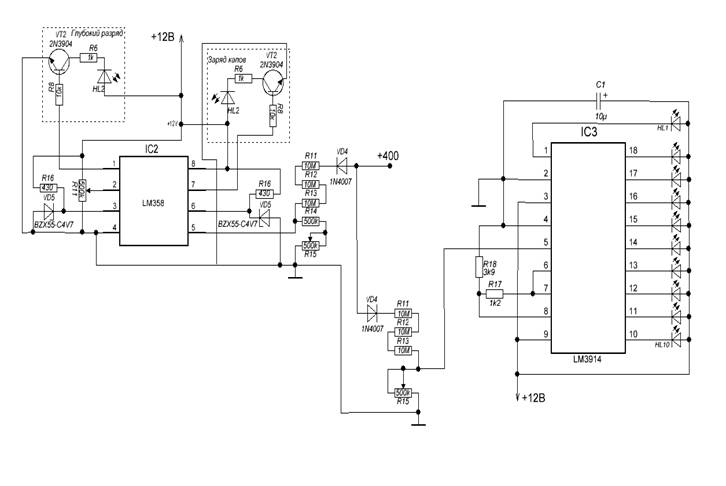 В схеме индикации используется ОУ в режиме компаратора. Схема индикации разряда (красный светодиод) сигнализирует о разряженном аккумуляторе. Схема индикации заряда конденсаторов (зеленый светодиод) сигнализирует о максимальном заряде конденсаторов. Схема делителя напряжения для внешней индикации зарядки предназначена для внешнего индикатора. Внешний индикатор сделан на микросхеме LM3914, схема рассчитана по справочным данным на микросхему, используется режим столбика.
В схеме индикации используется ОУ в режиме компаратора. Схема индикации разряда (красный светодиод) сигнализирует о разряженном аккумуляторе. Схема индикации заряда конденсаторов (зеленый светодиод) сигнализирует о максимальном заряде конденсаторов. Схема делителя напряжения для внешней индикации зарядки предназначена для внешнего индикатора. Внешний индикатор сделан на микросхеме LM3914, схема рассчитана по справочным данным на микросхему, используется режим столбика.
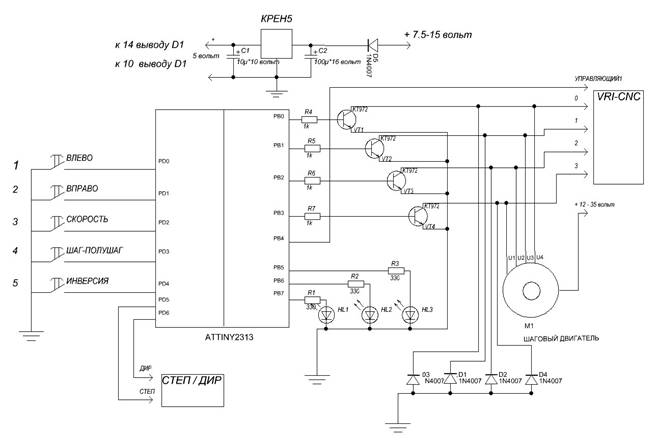
Поворотная платформа.
Управление униполярным шаговым двигателем осуществляется с помощью микропроцессора ATtiny 2313. Двигатель применен от дисководов и сделан редуктор, позволяющий платформе вращаться плавно.
Расчет параметров составных частей ступеней (количества витков катушек, диаметра провода катушек, емкость конденсаторов ступеней) с учетом диаметра ствола и массы ускоряемого тела велись с помощью программы FEMM. Задача расчетов была в том, чтобы, оптимизируя расчетные данные добиться совпадения максимальной скорости ускоряемого предмета в теле катушки с максимальной скоростью на выходе каждой катушки в ступенях. На основе расчетов составлены графики.




После изготовления макета магнитного ускорителя и проведенных испытаний стрельбы, возникла необходимость в проверке расчетных результатов скорости металлической болванки с реальной скоростью вылета. Для этих целей был применен метод определения скорости - баллистический маятник. Метод работает следующим образом. Металлическая болванка попадает в маятник и остается в нем. Это полностью неупругий удар. Часть энергии неизбежно уходит в тепло, но зато мы можем воспользоваться законом сохранения импульса. Импульс подвеса с пулей будет равен импульсу пули до попадания. Т.е. зная импульс (скорость) подвеса, можно узнать импульс (скорость пули). Получив импульс, который имеет аналог в виде кинетической энергии (пока неизвестной), маятник начинает отклоняться. При отклонении, подвес начинает подниматься вверх, кинетическая энергия переходит в потенциальную. Когда подвес остановится (максимальное отклонение, высота) кинетическая энергия полностью перешла в потенциальную. (Рис. 1)

Узнав высоту, получаем потенциальную (кинетическую в момент попадания) энергию подвеса, через энергию - импульс подвеса, через импульс подвеса - импульс пули, скорость пули.
Полная формула:
V=((M + m) / m) * sqrt(2*g * (L - sqrt(L*L - S*S)))
Упрощенная практическая формула:
V = ((M + m) / m) * S * sqrt (g / L)
V - скорость пули, м/с
M - масса подвеса, кг
m - масса пули, кг
g - ускорение свободного падения, 9.81
L - длина подвеса, метры
S - отклонение маятника, метры.
В процессе проводимых экспериментов получены результаты (Рис. 2).
 Рис.2
Рис.2
 Для уточнения измерений величины скорости по методу «баллистический маятник» был применен еще один способ измерения по звуковой карте компьютера. Расчет велся с помощью программы от Sony «Sound Forge». Для этого был собран макет (Рис. 3)
Для уточнения измерений величины скорости по методу «баллистический маятник» был применен еще один способ измерения по звуковой карте компьютера. Расчет велся с помощью программы от Sony «Sound Forge». Для этого был собран макет (Рис. 3)
Рис. 3
КПД устройства получилось следующим:

ЗАКЛЮЧЕНИЕ
В ходе проделанной практической работы был изготовлен макет магнитного ускорителя. Анализ результатов и физических измерений показал, что подобный вид ускорителя масс практически осуществим. Результаты расчетов параметров ступеней с помощью программы «FEMM» оказались аналогичными с результатами практических испытаний. Макет работоспособен и на нем можно продолжить серию экспериментов с целью увеличения скорости снаряда и КПД устройства. Можно проанализировать влияние на эти параметры диаметра и веса снаряда, состава материала из которого он изготовлен, количества ступеней.
И еще одно немало важное замечание: не смотря на то, что это устройство имеет небольшие энергетические параметры, во время экспериментов с ним и проведения пробных запусков необходимо соблюдать все меры безопасности, связанные с высоким напряжением и вылетом металлической болванки.