Структура системы управления
ПИД-регуляторы, формирующие регулирующее воздействие в зависимости от изменения регулируемой величины, интеграла и производной от нее, являются по существу единственными регуляторами, используемыми на практике в системах автоматического управления технологическими процессами. Передаточная функция этих регуляторов обычно представляется следующим образом:
 , (1)
, (1)
где  ,
,  ,
,  – коэффициент передачи, постоянные времени интегрирования и дифференцирования, соответственно.
– коэффициент передачи, постоянные времени интегрирования и дифференцирования, соответственно.
Структурная схема системы с исследуемым ПИД-регулятором, основанным на пропорционально-интегрально-дифференциальном законе управления объектом представлена на рис. 1.

Рис. 1.
Вопреки распространенному представлению, ПИД-регуляторы являются далеко не простыми в настройке. Не говоря о том, что приходится осуществлять поиск по трем параметрам, задача оказывается многоэкстремальной. Так, если для ПИ-регулятора можно априори утверждать, что уменьшение коэффициента передачи и увеличение постоянной времени интегрирования при обычно существующей динамике объектов всегда ведут к увеличению запаса устойчивости, то для систем с ПИД-регуляторами такое утверждение может оказаться неверным.
В настоящее время еще отсутствует единый метод расчета параметров регулятора для контура регулирования. Однако предложен ряд подходов, многие из которых требуют наличия математической модели реального объекта.
Эмпирический метод настройки Циглера-Никольса
Впервые этот метод был изложен в работе двух американских инженеров Циглера и Никольса в 1942 году. Суть данного метода состоит в следующем:
- в функционирующей системе выключаются интегральная и дифференциальная составляющие ПИД-регулятора (
 ,
,  ), то есть система переводится в П-закон регулирования;
), то есть система переводится в П-закон регулирования; - путем последовательного увеличения
 с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом
с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом  . Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора
. Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора  и периода критических колебаний в системе . При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения;
и периода критических колебаний в системе . При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения; - далее рассчитываются и устанавливаются параметры ПИД-регулятора по следующим формулам:
 ,
,  ,
,  .
.
Данный метод удобно использовать тогда, когда достаточно обеспечить довольно посредственные динамические качества замкнутой системы управления устойчивыми объектами, параметры которых точно измерить не удается. Большинство специалистов называют главным недостатком метода большое перерегулирование и необходимость выведения системы на границу устойчивости.
Метод настройки Шубладзе
ПИД-регуляторы используются для управления динамическими процессами с изменяющимися в широких диапазонах параметрами и подверженными воздействию неконтролируемых возмущений в системах автоматического управления.
Передаточная функция объекта управления включает параметры – статический коэффициент усилия объекта управления  , постоянные времени объекта
, постоянные времени объекта  и
и  и степень
и степень  :
:
 . (2)
. (2)
Приведенная передаточная функция при выборе соответствующих параметров может описывать объекты с чистым запаздыванием.
Зависимость настроечных параметров ПИД-регулятора представлена следующими соотношениями:
- пропорциональный коэффициент настройки находится по формуле:
 ; (3)
; (3)
- интегральный коэффициент настройки находится по формуле:
 ; (4)
; (4)
- дифференциальный коэффициент настройки находится по формуле:
 (5)
(5)
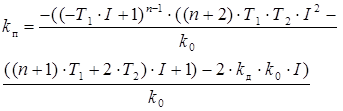
При  :
:
 , (6)
, (6)
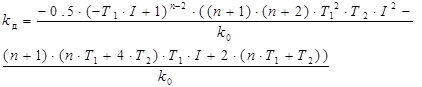
а при  :
:
 , (7)
, (7)
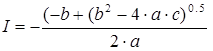
где
 ,
,
 , (8)
, (8)
 .
.
Коэффициенты настройки ПИД-регулятора рассчитываются при подстановке параметров передаточной функции объекта управления в формулы (6)–(8), а затем по формулам (3)–(5).