| ОГРАНИЧИТЕЛИ Q, ПУТИ, ВЫСОТЫПОДЪЕМА |
| БУФЕРНЫЕ УСТРОЙСТВА, УПОРЫ, УКАЗАТЕЛИ |
Лекция 25
ОГРАНИЧИТЕЛИ Q, ПУТИ, ВЫСОТЫПОДЪЕМА
Для ограничения хода крановых тележек и мостов кранов применяются упоры, устанавливаемые на концах пути тележек и мостов, а сами тележки и мосты снабжаются буферами — устройствами, смягчающими удары при наездах на упоры. В самых простых случаях их можно изготовлять из дерева или резины. На рис., а показана конструкция пружинного буфера, устанавливаемого на тяжелых кранах. Этот буфер имеет четыре пружины — две внутренние и две наружные. Направление навивки каждой пары пружин — встречное, чтобы устранить влияние закручивания торцов пружин при их нагружении. В пружинных буферах большая часть кинетической энергии удара переходит в потенциальную энергию сжатия пружины, поэтому работа пружинного буфера сопровождается отдачей, что является нежелательным явлением. Кроме того, пружинные буферы довольно громоздки. Способность пружинного буфера поглощать энергию можно существенно увеличить, применяя предварительно поджатые пружины. При этом снижается ход буфера и, следовательно, его габариты. Применение пружинных буферов целесообразно при скорости крана или тележки, не превышающей 70 м/мин.
При более высокой скорости движения соответствующей установкой конечных выключателей достигается своевременное замыкание тормоза, снижающего скорость движения при подходе к упору до 70 м/мин.

Рис. 157. Буферы:
а — пружинный; б — гидравлический
Более рациональны гидравлические буферы, поглощающие значительно большую энергию удара и не имеющие отдачи. Энергия удара в этих буферах расходуется на продавливание рабочей жидкости через кольцевой зазор между отверстием в дне поршня и штоком (рис. 157, б) и почти целиком переходит в теплоту. Буфер состоит из корпуса 3, поршня 4, штока 5, возвратной пружины 6, наконечника 1 и ускорительной пружины 2. Рабочая жидкость заполняет внутреннюю часть поршня и при осадке буфера протекает через отверстие в дне поршня. Так как шток 5 имеет переменное сечение, то площадь кольцевого зазора между дном поршня и штоком изменяется, вследствие чего изменяется и сопротивление передвижению поршня. Соответствующим подбором сечения можно получить различные закономерности замедления движения крана при остановке его буфером. Пружина 2 используется для создания плавного нарастания скорости движения поршня. В качестве рабочей жидкости применяют веретенное масло, если кран работает при нормальной температуре окружающей среды, и смесь спирта с глицерином — при работе в условиях пониженных температур.
Конструкции гидравлических буферов значительно компактнее пружинных. Их применение экономически оправдано при скорости движения, не превышающей 160 м/мин. При более высоких скоростях должны быть предусмотрены устройства, снижающие скорость движения до 160 м/мин при подходе крана к упору.
В последнее время вместо буферов все чаще используют специальные тупиковые устройства, у которых в конце пути рельс имеет плавный подъем и кинетическая энергия движущегося крана преобразуется в работу перемещения центра тяжести крана (или.тележки) на некоторую высоту.
Если скорость передвижения тележки или моста превышает 32 м/мин, то требуется установка конечных выключателей, обеспечивающих автоматическое замыкание тормоза на необходимом расстоянии от конца пути, что предупреждает наезд крана или тележки с большой скоростью на упоры. Механизмы передвижения башенных, портальных и козловых кранов, а также перегрузочных мостов должны иметь конечные выключатели независимо от с'корости передвижения крана. Взаимосогласованные конечные выключатели должны применяться для предупреждения столкновения мостовых или консольных кранов, работающих на одном подкрановом пути. Отключение механизмов передвижения этих кранов должно производиться на расстоянии между ними не менее 0,5 м. После срабатывания концевых выключателей движение кранов может осуществляться только в обратную сторону. Такие выключатели разрешается не устанавливать при работе на одном пути нескольких башенных, козловых или портальных кранов.
При больших скоростях передвижения моста (более 80 м/мин) рычажные концевые выключатели недостаточно надежны и для таких кранов разработаны конструкции фотоэлектрических остановов.
Концевой выключатель механизма передвижения устанавливают таким образом, чтобы он срабатывал, когда расстояние от упора составляло бы не менее половины пути торможения (а это обеспечивает движение в момент приближения к упору со скоростью, равной половине номинальной), а у башенных, портальных, козловых кранов и перегрузочных мостов — не менее полного пути торможения.
Для механизмов передвижения мостовых кранов допускается исключение из этого правила, если кран подходит к посадочной площадке с наименьшей скоростью, допускаемой электросхемой крана. В этом случае рекомендуется установка двух тормозов в приводе механизма передвижения: один — стопорный, включаемый только для удержания крана против угона его ветровой нагрузкой нерабочего состояния, а второй — рабочий.
Противоугонные устройства, устанавливаемые на кранах для предотвращения угона их ветровой нагрузкой нерабочего состояния, можно разделить на три группы по принципу их действия стопорные устройства или фиксаторы, действие которых основано на том, что кран фиксируется закладными пальцами, крюками или выдвижными упорами, связывающими кран с неподвижной опорой; противоугонные устройства нажимного типа (остановы), действие которых основано на создании трения между рельсом и специальным башмаком, подводимым под ходовое колесо и воспринимающим часть собственного веса крана; клещевые рельсовые захваты, действие которых основано на принципе непосредственного зажатия головки подкранового рельса рабочими поверхностями захвата.
Захваты бывают ручные и механические (автоматические и полуавтоматические). По правилам Госгортехнадзора противоугонные устройства с механическим приводом должны быть оборудованы дополнительным устройством для приведения их. в действие вручную. Для мостовых кранов рекомендуется применять ручные захваты клещевого типа, устанавливаемые с обеих сторон моста крана. В перегрузочных мостах применяют клещевые противоугонные устройства с грузовым клином или винтовые, имеющие механический привод управления клещами из кабины крановщика, или автоматического действия. Эти устройства должны быть сблокированы с механизмом передвижения так, чтобы захваты открывались перед началом движения и замыкались после остановки крана.
Для оповещения крановщика о достижении ветром опасной скорости башенные, портальные, кабельные краны и мостовые перегружатели снабжаются анемометрами, имеющими звуковую или световую сигнализацию.
После получения сигнала крановщик должен прекратить работу, обесточить кран и закрепить его противоугонными захватами.
Лекция 26
БУФЕРНЫЕ УСТРОЙСТВА, УПОРЫ, УКАЗАТЕЛИ






Большинство динамических нагрузок металлических конструкций грузоподъемных машин возникает в результате силового воздействия металлоконструкций с установленными на ней механизмами. Для предварительного выяснения закономерности возникновения динамических нагрузок в металлоконструкциях предположим, что на металлоконструкцию действуют некоторые силы, зависящие только от времени.
За расчетную динамическую схему металлоконструкции примем одномассовую систему с одной упругой связью. Рассмотрим сначала действие ограниченной, линейно возрастающей нагрузки Gгр(t).
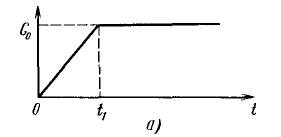
Дифференциальное уравнение движения массы m при t < t1 имеет вид


Общее решение уравнения при нулевых начальных условиях т.е.

 *
*
А скорость массы m (скорость деформации упругой связи)
 **
**

Изменение деформации упругой связи при t1< t.
Между частотой р собственных колебаний системы и периодом Т собственных колебаний имеется зависимость в виде рТ = 2 
Подставив выражение р в формулу *
получим 
Рассматривая выражение **можно сделать вывод, что при


Начальные условия для решения этого уравнения находят путем подстановки
в уравнения * и ** значения t = t1
Решая уравнение получаем:

Выражая р через Т имеем:
 ***
***
Максимальная деформация упругой связи

Изменения этого коэффициента в зависимости от отношения t1/T
показано на рисунке далее штриховой линией. Как видно из рисунка, при мгновенном приложении нагрузки (t1 = 0) динамический коэффициент
кд = 2, а при t1/T > 6, кп < 1.05
Динамическим влиянием нагрузки в этом случае можно пренебречь.

Для практических расчетов изменение динамического коэффициента принимается по кривой, показанной на рисунке сплошной линией.
По изложенной методике можно ориентировочно оценить, например, динамическое воздействие на металлоконструкцию от веса поднимаемого с опоры груза, если за время развития нагрузки t1 принятьвремя натяжения подъемных канатов до отрыва груза от опоры.
Динамические нагрузки кранов при их пуске и торможении.




