В соответствии с выбранной структурой регулятора опишем принцип действия алгоритмов, указанных в таблице 9 (п. 5).
· ОКО – оперативный контроль регулирования. [8]
Алгоритм применяется в том случае, если оперативное управление контуром
регулирование должно вестись с помощью лицевой панели контроллера. Каждый контур (от 1 до 4) обслуживается своим алгоритмом ОКО.
Функциональная схема алгоритма ОКО изображена на рис. 5.[11]

Рис. 5. Функциональная схема алгоритма «Оперативный контроль регулирования ОКО».
Алгоритм позволяет с помощью клавиш лицевой панели изменять режим управления, режим задания, управлять программным задатчиком, изменять выходной сигнал регулятора (в режиме ручного задатчика), а также контролировать сигналы задания и рассогласования, входной и выходной сигналы, параметры программ (при программном регулировании) и т.п.
Как правило, алгоритм ОКО применяется в сочетании с алгоритмами ЗДН, ЗДЛ, РУЧ, РАН, РИМ.
Алгоритм ОКО имеет от 10 до 15 входов. В зависимости от вида регулятора. Выходов он не имеет.
Путем конфигурирован
ия входов определяется, какие сигналы принимаются в качестве сигналов оперативного управления.
Обозначение и назначение входов приведены в таблице 9.[10]
Таблица 9. Входы алгоритма ОКО.
| Входы
| Назначение
|
| №
| Обозначение
|
|
| Xздн
| Сигнал задания
|
|
| Xвх
| Входной сигнал (регулируемый параметр)
|
|
| W0
| 0% в технических единицах
|
|
| W100
| 100% в технических единицах
|
|
| Xε
| Сигнал рассогласования
|
|
| Xруч
| Сигнал ручного управления
|
|
| Хвр
| Выходной сигнал регулятора
|
|
| Z
| Любой выбранный сигнал
|
|
| Nz
| Тип сигнала на входе Z
|
|
| Nок
| Ошибка контура
|
|
| Хздл
| Сигнал задания ведомого регулятора в локальной системе
|
|
| Хвх.л
| Входной сигнал (регулируемы параметр) ведомого регулятора в локальном режиме
|
|
| W0.л
| 0% в технических единицах для ведомого регулятора в локальном режиме
|
|
| W100.л
| 100% в технических единицах для ведомого регулятора в локальном режиме
|
|
| Xε.л
| Сигнал рассогласования ведомого регулятора в локальном режиме
|
Таким образом, с помощью алгоритма ОКО назначаются функции и сигналы оперативного управления контуром регулирования. Алгоритм определяет, какие сигналы будут выведены на индикаторы лицевой панели и в каких технических ед
иницах (для задания, входа и рассогласования) эти сигналы будут индицироваться.
· ВАА – ввод аналоговой группы А. [8]
Алгоритм применяется для связи функциональных алгоритмов с аппаратными средствами аналогового ввода (с АЦП). Алгоритм обслуживает до 8 аналоговых входов.
Помимо связи с АЦП алгоритм ВАА позволяет корректировать диапазон входного аналогового сигнала в двух точках, соответствующих 0% и 100% диапазона.
Алгоритм содержит несколько идентичных независимых каналов, которое задается модификатором. Каждый канал связан с соответствующим (по номеру) аналоговым входом контроллера. Эта связь образуется «автоматически», как только алгоритм ВАА вводится в один из алгоблоков контроллера. К входному аналоговому сигналу добавляется сигнал смещения Хсм, полученная сумма умножается на коэффициент Км. Эти операции позволяют компенсировать смещение нуля и диапазона как АЦП, так и датчика, подключенного к контроллеру.
Функциональная схема алгоритма ВАА изображена на рис. 6.

Рис. 6. Функциональная схема алгоритма «Вход аналоговый ВАА».
Обозн
ачение и назначение входов-выходов алгоритма ВАА приведены в таблице 10.[11]
Таблица 10. Входы-выходы алгоритма ВАА.
| Входы
| Назначение
|
| №
| Обозначение
| Вид
|
|
| Хсм.1
|
Входы
| Смещение канала 1
|
|
| Хм.1
| Диапазон канала 1
|
|
| Хсм.2
| Смещение канала 2
|
|
| Хм.2
| Диапазон канала 2
|
| …
| …
| …
|
| 2m-1
| Хсм.m
| Смещение канала m
|
| m+1
| Хм.m
| Диапазон канала m
|
|
| Y1
|
Выходы
| Выход канала 1
|
|
| Y2
| Выход канала 2
|
| …
| …
| …
|
| m
| Ym
| Выход канала m
|
ИВА – импульсный вывод группы А. [8]
Алгоритм применяется, когда контроллер должен управлять ИМ постоянной скорости. Алгоритм преобразует сигнал, сформированный алгоблоками контроллера (в частности, алгоритмом импульсного регулирования), в последовательности импульсов переменной скважности. Алгоритм ИВА выдает последовательность указанных импульсов на средства дискретного выхода контроллера.
Функциональная схема алгоритма ИВА приведена на рис. 7.

Рис. 7. Функциональная схема алгоритма «Импульсный вывод ИВА».
Алгоритм содержит несколько каналов связи с выходами контроллера, число которых задается модификатором.
Каждый канал алгоритма ИВА содержит широтно-импульсный модулятор (ШИМ), преобразующий входной сигнал в последовательность импульсов со скважностью Q, пропорциональный входному сигналу. Параметр Т задает минимальную длительность выходных импульсов. Параметр N определяет, к какому контору регулирования относится данный канал алгоритма ИВА.
Обозначение и назначение входов алгоритма ИВА приведены в таблице 11.[12]
Таблица 11. Входы алгоритма ИВА. [8]
| Входы
| Назначение
|
| №
| Обозначение
|
|
| Х1
| Сигнал 1-го выхода
|
|
| Т1
| Длительность импульса 1-го выхода
|
|
| N1
| Номер контура, с которым связан 1-й выход
|
|
| Х2
| Сигнал 2-го выхода
|
|
| Т2
| Длительность импульса 2-го выхода
|
|
| N2
| Номер контура, с которым связан 2-й выход
|
|
| Х3
| Сигнал 3-го выхода
|
|
| Т3
| Длительность импульса 3-го выхода
|
|
| N3
| Номер контура, с которым связан 3-й выход
|
|
| Х4
| Сигнал 4-го выхода
|
|
| Т4
| Длительность импульса 4-го выхода
|
|
| N4
| Номер контура, с которым связан 4-й выход
|
· РИМ
– регулирование импульсное.
Алгоритм используется при построении ПИД и ПИ регулятора, работающего в комплекте с ИМ постоянной скорости. Алгоритм, как правило, применяется в сочетании с алгоритмом импульсного вывода ИВА, который преобразует выходной аналоговый сигнал алгоритма РИМ в последовательность импульсов, управляющих ИМ. Помимо формирования закона регулирования в алгоритме вычисляется сигнал рассогласования, этот сигнал фильтруется, вводится зона нечувствительности. Алгоритм содержит узел настройки, позволяющей автоматизировать процесс настройки регулятора.
Функциональная схема алгоритма содержит несколько звеньев и изображена на рис. 8.

Рис. 8. Функциональная схема алгоритма «Регулирование импульсное РИМ».
Звено, выделяющее сигнал рассогласования, суммирует два выходных сигнала, при этом один из них масштабируется, инвертируется и фильтруется.
Зона нечувствительности не пропускает на свой выход сигналы, значения которых
находятся внутри установленного значения зоны.
Алгоритм содержит узел настройки, систоящий из переключателя режима «работа-настройка», нуль-органа и дополнительного фильтра с постоянной времени.
Обозначение и назначение входов-выходов алгоритма приведены в таблице 12.
Таблица 12. Входы-выходы РИМ.[13]
| Входы
| Назначение
|
| №
| Обозначение
| Вид
|
|
| Х1
|
Входы
| Немасштабируемый вход (каскадный)
|
|
| Х2
| Масштабируемый вход
|
|
| КМ
| Масштабный коэффициент
|
|
| Тф
| Постоянная времени фильтра
|
|
| ХΔ
| Зона нечувствительности
|
|
| КП
| Коэффициент пропорциональности
|
|
| ТИ
| Постоянная времени интегрирования
|
|
| КД
| Коэффициент дифференцирования
|
|
| ТМ
| Время исполнительного механизма
|
|
| -
| Не используется
|
|
| Снас
| Команда перехода в режим настройки
|
|
| ХНО
| Уровень сигнала на выходе нуль-органа
|
|
| Кi
| Коэффициент, устанавливаемый в зависимости от свойств объекта
|
|
| Y
| Выходы
| Основной выход алгоритма (каскадный)
|
|
| Yε
| Сигнал рассогласования
|
· ЗДН – задание. [8]
Алгоритм применяется для формирования сигнала ручного задания в контуре регулирования. Через этот алгоритм к регулятору подключаются также программные задатчики и сигнал внешнего задания.
Алгоритм применяется в сочетании с алгоритмом ОКО.
Содержит узел ручного задания, узел динамической балансировки, переключатель вида задания и переключатель программ.
Алгоритм имеет модификатор, который определяет число независимых прогр
амм задатчиков, подключаемых к регулятору.
С помощью переключателя вида задания выбирается один и трех видов задания: ручное задание («РЗ»), программное задание («ПЗ») или внешнее задание («ВЗ»).
В режиме ручного задания сигнал задания изменяется вручную. В режиме программного задания сигнал задания поступает через соответствующий вход Хпр, i (обычно к этим входам подключаются программные задатчики). В режиме внешнего задания сигнал задания поступает с входа Хвн.
Алгоритм ЗДН содержит встроенный механизм статической и динамической балансировки.
Функциональная схема алгоритма ЗДН изображена на рис. 9.

Рис. 9. Функциональная схема алгоритма «Задание ЗДН».
Алго
ритм является инициатором команды отключения. Эта команда формируется в каскадном входе Х
вн, если установлен ручной или программный вид задания. Команда отключения вместе с текущим значением сигнала задания транслируется предвключенному алгоритму.
Обозначение и назначение входов-выходов алгоритма приведены в таблице 13.
Таблица 13. Входы-выходы алгоритма ЗДН.
| Входы
| Назначение
|
| №
| Обозначение
| Вид
|
|
| Ссб
|
Входы
| Включение статической балансировки
|
|
| СДБ
| Включение динамической балансировки
|
|
| VДБ
| Скорость динамической балансировки
|
|
| Хвн
| Сигнал внешнего задания
|
|
| ХПР.1
| Вход для 1-го программного задатчика
|
|
| ХПР.2
| Вход для 2-го программного задатчика
|
| …
| …
| …
|
| m
| ХПР.m
| Вход для m-го программного задатчика
|
|
| YЗДН
|
Выходы
| Основной выход (каскадный)
|
|
| Dруз
| Режим ручного задания
|
|
| Dвнш
| Режим внешнего задания
|
|
| Dпрг
|
Выходы
| Режим программного задания
|
|
| NП
| Номер текущей программы
|
|
| Nуч
| Номер текущего участка
|
|
| ТП
| Время, оставшееся до окончания текущего участка
|
|
| Dкпв
| Конец очередного повторения программы
|
|
| Nост
| Оставшееся число повторений
|
|
| Dпс
| Программа в состоянии «пуск»
|
|
| Dст
| Программа в состоянии «стоп»
|
|
| Dсбр
| Программа в состоянии «сброс»
|
|
| Dкп
| Конец программы
|
· РУЧ – ручное управление. [8]
Алгоритм предназначен для изменения режимов управления регулятора. С его помощью регулятор переключается в дистанционный или ручной режим работы. В ручном режиме выходной сигнал изменяется вручную. Алгоритм РУЧ применяется в составе как аналогового, так и импульсивного регулятора и используется в сочетании с алгоритмом ОКО. Алгори
тм содержит переключатель режимов работы и узел ручного управления.
Функциональная схема алгоритма РУЧ изображена на рис. 10.
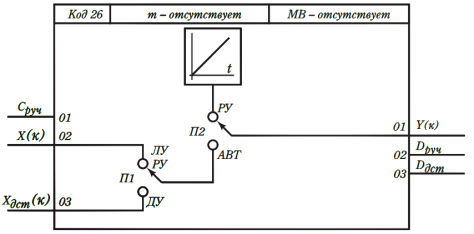
Рис. 10. Функциональная схема алгоритма «Ручное управление РУЧ».
Если на лицевой панели контроллера нажимается клавиша ручного режима, к выходу алгоритма РУЧ подключается узел ручного управления. Если в алгоритме ОКО, связанным с данным алгоритмом РУЧ, задан импульсный регулятор, то узел ручного управления формирует константу, определяющую среднюю скорость перемещения ИМ.
Если на лицевой панели контроллера нажимается клавиша автоматического режима управления, узел ручного управления отключается.
Обозначение и назначение входов-выходов алгоритма приведены в таблице 14. [10]
Таблица 14. Входы-выходы алгоритма РУЧ
| Входы
| Назначение
|
| №
| Обозначение
| Вид
|
|
|
| Сруч
|
Входы
| Переход на ручной режим
|
|
| Х(к)
| Сигнал локального или каскадного регулятора (каскадный)
|
|
| ХДСТ(к)
| Сигнал дистанционного управления (каскадный)
|
|
| Y(к)
|
Выходы
| Основной выход (каскадный)
|
|
| Dруч
| Ручной режим
|
|
| Dдст
| Дистанционный режим
|
| | | | | |