Контрольная работа для обучающихся заочной формы обучения состоит из: титульного листа (приложение 1); теоретической части; практической задачи; списка литературы.
Контрольная работа выполняется на одной стороне листа белой бумаги формата А4 одним из следующих способов: на компьютере – используя 14 шрифт, полуторный интервал, выравнивание по ширине; рукописным способом – аккуратным и разборчивым почерком с высотой букв не менее 2,5 мм.
Текст следует размещать, соблюдая следующие размеры полей: с левой стороны –30 мм, с правое – 15 мм, с верху и с низу – 20мм. В контрольной работе нумеруются все листы, входящие в контрольную работу, начиная со второго. Номер страницы на титульном листе не ставиться, на следующем ставиться цифра 2. Номера станиц проставляются в нижнем правом углу. Абзацы в тексте начинают отступом, равным 15-17 мм. Рисунке и схемы нумеруются по порядку.
Вариант контрольной работы выбираем по шифру.
Выполненную контрольную работу своевременно сдать в учебную часть техникума.
После получения контрольной работы внимательно изучить рецензию и все замечания преподавателя доработать.
Зачтенные контрольные работы предъявляются на экзамене.
Задание выбираем по таблице:
| № варианта | № вопроса | № схемы | № варианта | № вопроса | № схемы |
| 1, 11 | 6, 16 | ||||
| 2, 12 | 7, 17 | ||||
| 3, 13 | 8, 18 | ||||
| 4, 14 | 9, 19 | ||||
| 5, 15 | 10, 20 |
Вопросы контрольной работы
1. Описать виды движений в металлорежущих станках.
2. Описать виды и назначения станин и направляющих металлорежущих станков.
3. Описать приводы металлорежущих станков.
4. Описать устройство и назначение шпинделей и их опор.
5. Описать устройство и принцип работы механизмов прямолинейного движения станка.
6. Описать виды и назначение муфт в металлорежущих станках.
7. Описать виды и назначение тормозных устройств в металлорежущих станках.
8. Описать коробки скоростей.
9. Описать коробки подач.
10. Описать виды и принципы работы систем смазывания и охлаждения в металлорежущем станке.
11. Расшифровать модель станка 16Б16. Описать его устройство и виды выполняемых работ.
12. Расшифровать модель станка 1Г340П. Описать его устройство и виды выполняемых работ.
13. Расшифровать модель станка 2Н135. Описать его устройство и виды выполняемых работ.
14. Расшифровать модель станка 2М55. Описать его устройство и виды выполняемых работ.
15. Расшифровать модель станка 2620В. Описать его устройство и виды выполняемых работ.
16. Расшифровать модель станка 6Р82. Описать его устройство и виды выполняемых работ.
17. Расшифровать модель станка 5Б63. Описать его устройство и виды выполняемых работ.
18. Расшифровать модель станка 7Е35. Описать его устройство и виды выполняемых работ.
19. Расшифровать модель станка 7А420. Описать его устройство и виды выполняемых работ.
20. Расшифровать модель станка 3М151. Описать его устройство и виды выполняемых работ.
Практическая часть.
Провести анализ кинематической схемы цепи главного движения станка из приложения 2, согласно варианту, включающий написание уравнения кинематического баланса в общем и развернутом видах.
Определить количество скоростей вращения шпинделя, максимальную и минимальную частоту вращения шпинделя.
УРАВНЕНИЕ КИНЕМАТИЧЕСКОГО БАЛАНСА
Уравнение, устанавливающее функциональную зависимость между
величинами перемещений начального и конечного звеньев кинематической
цепи, называется уравнением кинематического баланса.
Начальные звенья кинематической цепи в большинстве случаев имеют вращательное движение, конечные звенья получают как вращательное,
так и прямолинейное движение.
Если начальное и конечное звенья оба вращаются, то уравнение кинематического баланса может быть представлено в следующем виде:

где nк – частота вращения конечного звена (шпинделя), об/мин; nн – частота вращения начального звена (вала электродвигателя), об/мин; i – передаточное отношение кинематической цепи.
i = i ∙ i1 ∙ i2 ∙ i3 ∙ … ∙ in,
где i1, i2 , i3, …, in – передаточные отношения отдельных кинематических
пар цепи.
Если начальное звено имеет вращательное движение, а конечное –
прямолинейное (движение подачи), то при минутной подаче Sм уравнение
кинематического баланса имеет вид
 ,
,
где H –ход кинематической пары, преобразующей вращательное движение
в прямолинейное.
Для винтовой пары
 ,
,
где tв – шаг ходового винта, мм; k –число его заходов.
Для реечной пары
 ,
,
где m –модуль зацепления, мм; z – число зубьев реечного колеса.
Когда подача конечного звена Sо задается в миллиметрах на один
оборот начального звена, уравнение кинематического баланса имеет вид

ПРИМЕР АНАЛИЗА КИНЕМАТИЧЕСКОЙ СХЕМЫГЛАВНОГО ДВИЖЕНИЯ РЕЗАНИЯ ГОРИЗОНТАЛЬНО-ФРЕЗЕРНОГО СТАНКА МОДЕЛИ 6М80Г
Кинематическая схема цепи главного движения (вращения шпинделя) приведена на рисунке 1.

Рисунок 1 – Кинематическая схема главного движения резания (вращения шпинделя) горизонтально-фрезерного станка модели 6М80Г.
Уравнение кинематического баланса цепи в общем виде:

Количество скоростей вращения шпинделя

Максимальное и минимальное число оборотов шпинделя:


Список литературы
1. Черпаков Б.И. Металлорежущие станки: Учебник/ Б.И. Чеерпаков, Т.А. Альперович. – М.: Издат. Центр Академия, 2008. – 368 с.
2. Черпаков б.и.., Вереина Л.И. Технологическое оборудование машиностроительного производства. – М.: академия, 2006.
3. Схиртладзе А.Г., Новиков В.Ю. Технологическое оборудование машиностроительных производств. –М.: Высшая школа, 2002
4. Чернов Н.Н. Металлорежущие станки. – М.: Машиностроение, 1989.
5. Ермаков Ю.М., Фролов Б.Н. Ме6таллорежущие станки. – М.: Машиностроение, 1985.
6. Моёров А.Г Устройство, основы конструкции и расчёт металлообрабатывающих станков и автоматических линий. – М.: Машиностроение, 1986
Приложение 1.
ГБПОУ «Самарский техникум авиационного и промышленного машиностроения им. Д.И. Козлова»
КОНТРОЛЬНАЯ РАБОТА
по дисциплине «Технологическое оборудование»
Выполнил: студент гр. ТМ-2з
Иванов И.И.
Проверила: преподаватель
Гордеева Е.А.
Самара, 2018
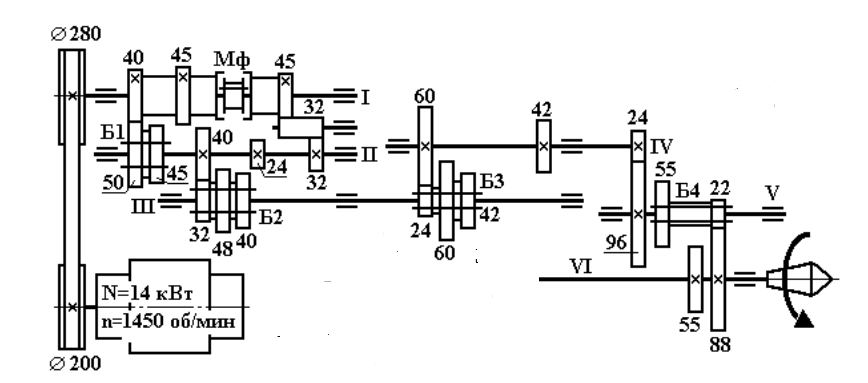
Приложение 2.
Схема 1 – Цепь главного движения токарно-затыловочного станка модели К96

Схема 2 – Схема главного движения горизонтально-расточного станка модели 262Г
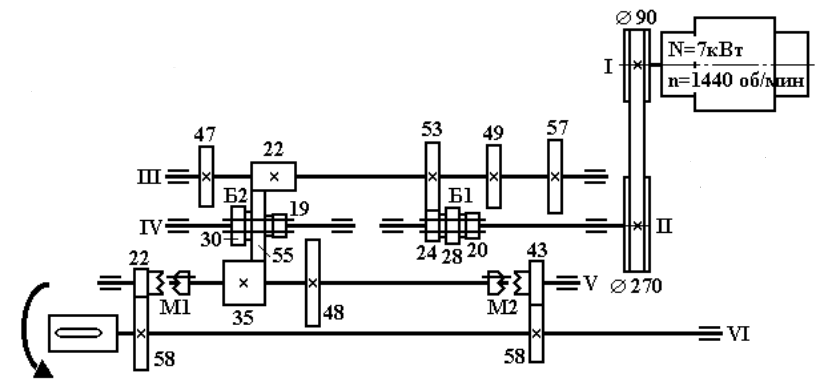
Схема 3 – Схема главного движения горизонтально расточного станка модели 2620А
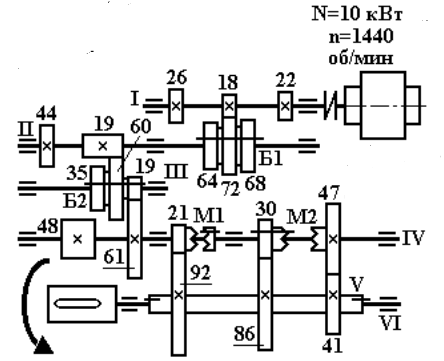
Схема 4 – Схема главного движения вертикально-фрезерного станка модели 6Н12ПБ

Схема 5 – Схема главного движения токарно-винторезного станка модели 163