Цель работы: Изучить конструкцию и принцип действия трехфазного синхронного реактивного двигателя.
Общие указания: Синхронный реактивный электродвигатель – синхронный электродвигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов.
Конструкция синхронного реактивного двигателя
Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой, и состоит из корпуса и сердечника с обмоткой.

| 
|
| Рис. 1 Синхронный реактивный двигатель | Рис. 2 Статор синхронного реактивного электродвигателя с распределенной обмоткой |
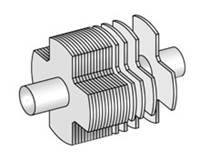
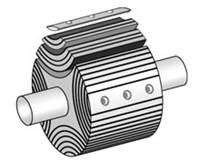
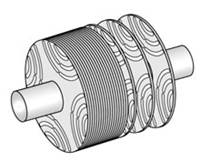
Выделяют три основных типа ротора реактивного двигателя: ротор с явновыраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
| 
| 
|
| Рис. 3 Ротор с явновыраженными полюсами | Рис. 4 Аксиально-расслоенный ротор | Рис. 5 Поперечно-расслоенный ротор |
Принцип работы реактивного двигателя: Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи. Амплитуда момента прямо пропорциональна разницы между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент.

| 
|
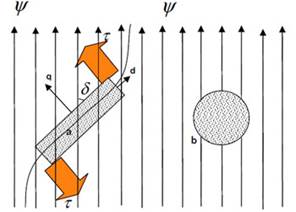
| Рис. 6 Линии магнитного поля синхронного реактивного электродвигателя | Рис. 7 Объект с анизотропной геометрией (a) и изотропной геометрией (b) в магнитном поле |
Главная идея может быть объяснена с помощью рисунка 7. Объект "a" состоящий из анизотропного материала имеет разную проводимость по оси d и оси q, в то время как изотропный магнитный материал объекта "b" имеет одинаковую проводимость во всех направлениях. Магнитное поле, которое прикладывается к анизотропному объекту "a", создает вращающий момент, если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта "a" не совпадает с линиями магнитного поля, объект будет вносить искажения в магнитное поле. При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
В синхронном реактивном электродвигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет существовать момент, направленный на то, чтобы уменьшить полную потенциальную энергию системы, путем уменьшения искажения поля по оси q (δ→0). Если угол δ сохранять постоянным, например, путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
Ток статора отвечает за намагничивание и за создание момента, который пытается уменьшить искаженность поля. Управление моментом осуществляется путем контроля фазы тока, то есть угла между вектором тока обмоток статора и d-осью ротора во вращающейся системе координат.

Рис. 8 Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
Особенности синхронного реактивного электродвигателя:
Преимущества:
− Простая и надежная конструкция ротора:
− ротор имеет простую конструкцию, состоящую из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки.
− Низкий нагрев:
− так как в роторе отсутствуют токи, он не нагревается во время работы, увеличивая срок службы электродвигателя.
− Нет магнитов:
− снижается конечная цена электродвигателя, так как при производстве не используются редко земельные металлы. При отсутствии магнитных сил упрощается содержание и техническое обслуживание электродвигателя.
− Низкий момент инерции ротора:
− так как на роторе отсутствует обмотка и магниты, момент инерции ротора ниже, что позволяет электродвигателю быстрее набирать обороты и экономить электроэнергию.
− Возможность регулирования скорости:
− в виду того, что синхронный реактивный электродвигатель для своей работы требует частотный преобразователь, имеется возможность управления скоростью вращения реактивного двигателя в широком диапазоне скоростей.
Недостатки:
− Частотное управление:
− для работы требуется частотный преобразователь.
− Низкий коэффициент мощности:
− из-за того, что магнитный поток создается только за счет реактивного тока. Решается за счет использования частотного преобразователя с коррекцией мощности.
Контрольные вопросы:
1. Основные элементы конструкции СРД и их назначение.
2. Назначение, принцип действия СРД.
3. В чем отличие конструкций роторов СРД?
4. Поясните преимущества и недостатки СРД в сравнении с синхронными двигателями с электромагнитным возбуждением.
5. Поясните преимущества и недостатки СРД в сравнении с асинхронным двигателем.