1) Неподвижная цилиндрическая опора. Имеет одну реакцию  произвольным образом направленную на плоскости, для ее определения необходимо разложить на две составляющие, направленные по осям координат:
произвольным образом направленную на плоскости, для ее определения необходимо разложить на две составляющие, направленные по осям координат:  ,
,  (рис.1.2) тогда
(рис.1.2) тогда 
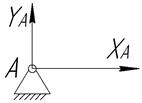
Рис.1. 2
2) Подвижная цилиндрическая опора. Имеет одну реакцию, направленную перпендикулярно плоскости, на которой она расположена (рис. 1.3);

Рис.1.3
3) Подшипник. Имеет две реакции: силу, перпендикулярную направляющим подшипника, и крутящий момент (рис. 1.4);

Рис.1.4
4) Скользящая опора. Имеет одну реакцию в виде крутящего момента МА (рис. 1.5);

Рис. 1.5
5) Жесткая заделка. Имеет три реакции: две силы, расположенные вдоль осей координат, и крутящий момент: YA, XA, MA (рис. 1.6);

Рис. 1.6
6) Стержень. Имеет одну реакцию, направленную вдоль стержня: SAB (рис. 1.7)

Рис. 1.7
7) Гибкая связь (нить). Имеет одну реакцию, направленную вдоль нити равную весу груза, который на ней подвешен: T=| P | (рис. 1.8).

Рис. 1.8
Методика решения задач
Решение задач на произвольную плоскую систему сил рекомендуется производить в следующей последовательности:
а) установить систему сил, т.е. изобразить её графически, приложить заданные силы и выделить объект равновесия;
б) отбросить наложенные на объект равновесия связи, заменив их действие реакциями;
в) составить расчётную схему объекта равновесия, выбрав предварительно систему координат;
г) составить и решить уравнения равновесия.
В зависимости от степени сложности задач и от навыков, полученных студентом, некоторые пункты плана могут быть совмещены.
Пример 1.1
Однородная балка АВ весом Р =500 Н удерживается в горизонтальном положении тросом, перекинутым через неподвижный блок и несущим груз С. Определить вес груза РС и реакцию шарнира А (рис. 1.9).
Решение:
Согласно (рис.1.9 а) объектом равновесия является балка АВ. Её перемещению препятствует неподвижный цилиндрический шарнир в точке А и трос, закрепленный в точке В. На заданную систему действуют активные силы – силы тяжести Р и РС. Мысленно отбрасываем связи, заменяя их реакциями. Реакция троса  направляется вдоль него от балки к точке подвеса. Модуль этой реакции равен силе тяжести груза С:
направляется вдоль него от балки к точке подвеса. Модуль этой реакции равен силе тяжести груза С:  .
.

Рис. 1.9
Дальнейшее решение может быть произведено двумя способами.
1. Воспользовавшись теоремой о трех силах, найдём точку пересечения линий действия сил  и
и  точка О (рис.1.9б). Следовательно, линия действия реакции
точка О (рис.1.9б). Следовательно, линия действия реакции  A должна быть направлена вдоль прямой АО. Наносим её предполагаемое направление. Выбрав плоскую систему координат ХАУ, получаем расчётную схему объекта равновесия (рис. 1.9б). Составляем уравнения равновесия для полученной плоской системы сходящихся сил:
A должна быть направлена вдоль прямой АО. Наносим её предполагаемое направление. Выбрав плоскую систему координат ХАУ, получаем расчётную схему объекта равновесия (рис. 1.9б). Составляем уравнения равновесия для полученной плоской системы сходящихся сил:



.Из сопоставления треугольников ADО и ВDО получим  =60º.
=60º.
Тогда получим систему уравнений:
 ,
,

Откуда получаем:
 (Н).
(Н).
Следовательно:
RC = 287,35 Н,
RA =-287,35 Н.
Знак "-" указывает на то, что для получения действительного на- правления реакции предварительно выбранное направление нужно заменить на противоположное.
2. Представим реакцию как геометрическую сумму двух составляющих (рис.1.9в):
 .
.
Выбрав плоскую систему координат ХAУ, получаем расчетную схему объекта равновесия (рис.1.9,в). Для полученной произвольной плоской системы сил составляем уравнения равновесия в виде:

Решаем полученную систему. Из третьего уравнения:
(Н).
Из первого уравнения:
 (Н).
(Н).
Знак "-" указывает что истинное направление реакции противоположно первоначально выбранному.
Из второго уравнения:
 (Н).
(Н).
Тогда полная реакция в шарнире А имеет величину:
 .
.
Для контроля правильности решения составим уравнение моментов относительно точки В:

Получено тождество, которое подтверждает правильность решения.
Пример 1.2
Определить реакции связей данной конструкции (рис. 1.10),если P = 4H,
q = 1H/м, M = 2H м.
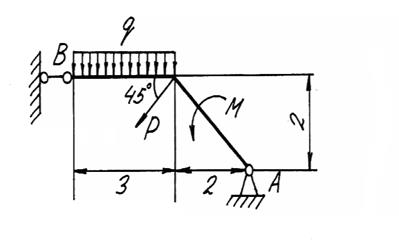
Рис. 1.10
Решение:
1. Отбросим связи, положенные на конструкцию в точках А и В, заменим их действие реакциями:
- в точке А - неподвижная цилиндрическая опора, имеет реакции, направленные по осям координат ХА, и УА,
- в точке В - подвижная цилиндрическая опора, имеет реакцию RВ (рис.1.11).

Рис. 1.11
2. Составим уравнения равновесия заданной конструкции:
 |
 SXi = 0 XA- P Cos450+RB = 0
SXi = 0 XA- P Cos450+RB = 0
SYi = 0 YA- P Sin450 + Q = 0
 |
SMA(Fi) = 0 M + P 22 + 22 + Q 3,5 - RB2 = 0
Из уравнения (3) определим реакцию RB:
 |  |
M+P 8 + 3,5Q 2+4 8 +3,5x3

 RB= = = 11,85 (Н).
RB= = = 11,85 (Н).
2 2
где Q = q l, Q = 1 3 = 3 (H).
 Из уравнения (2) определим реакцию УА:
Из уравнения (2) определим реакцию УА:
2
 yA = P Sin450 + Q,yA = 4 +3 = 5,8 (H).
yA = P Sin450 + Q,yA = 4 +3 = 5,8 (H).
2
Из уравнения (1) определим реакцию ХА:
 2
2
 xA = P Cos450 - RB, xA =4 2 - 11,85 = -9,05 (H).
xA = P Cos450 - RB, xA =4 2 - 11,85 = -9,05 (H).
Реакция Х A получилась с отрицательным знаком, значит, ее направление следует взять противоположно тому, что показано на схеме (рис.1.11).
Ответ: xA = -9,05 H, yA = 5,8 H, RB = 11,85 H.