К-3. КИНЕМАТИЧЕСКИЙ РАСЧЁТ ПЛОСКОГО МЕХАНИЗМА
Кривошип ОА вращается с угловой скоростью w. Определить для заданного на рисунке 7.8 положения механизма:
- скорости всех точек механизма и угловые скорости его звеньев с помощью плана скоростей;
- скорости всех точек механизма и угловые скорости его звеньев с помощью мгновенных центров скоростей;
- ускорение точек А и В и угловое ускорение звена АВ с помощью построения плана ускорения и аналитическим способом.
Необходимые данные взять из таблицы 7.1.
Таблица 7.1
| вариант | I | II | III | |
| Длина звена ОА, см | φ, град | 
| 
| |
| –3 | ||||
| –1 | ||||
| –1 | –3 | |||
| –2 | –2 | |||
| –4 | ||||
| –3 | ||||
| –2 | ||||
| –1 | ||||
| –2 | –2 | |||
| –3 | ||||
| –1 | ||||
| -3 | ||||
| 2,8 | -2 | |||
| -2 | ||||
| -4 | ||||
| -3 | ||||
| -2 |
Исходные данные для задачи К-3

Рисунок 7.8


Рисунок 7.8 – продолжение

Рисунок 7.8 – продолжение



Рисунок 7.8– окончание
Практическое занятие 8
Кинематический анализ плоского механизма. Определение скоростей и ускорений точек многозвенного механизма
8. Кинематический анализ плоского механизма. Методика решения задач [1,4,5,6]
Пример 8.1
Кривошип О1А вращается с постоянной угловой скоростью 
Определить для данного положения механизма (рис. 8.1):
¨ скорости всех точек механизма и угловые скорости всех его звеньев с помощью мгновенных центров скоростей;
¨ скорости всех точек механизма и угловые скорости всех его звеньев с помощью плана скоростей;
¨ ускорения указанных точек механизма и необходимые угловые ускорения звеньев, с помощью плана ускорений;
¨ положение мгновенного центра ускорений указанного звена.
Необходимые данные взять из таблицы 8.1.
Таблица 8.1
Исходные данные пример 8.1
| w, рад | Расстояние, см. | Длина звеньев, см. | ||||||||||
| A | b | c | d | О1А | О2В | О3D | АВ | ВС | СD | СЕ | ЕF | |
Решение:
Изображаем положение механизма согласно данных (рис. 8.1).
Вводим масштабный коэффициент по длинам:
 .
.
Определяем скорости точек механизма и угловые скорости звеньев с помощью построения плана скоростей (рис. 8.2).
Точка А принадлежит кривошипу О 1 А, который совершает вращательное движение, поэтому:

Вектор VА направлен перпендикулярно кривошипу О1А в сторону  .
.
Введем масштабный коэффициент по скоростям:
 .
.
Для определения скорости точки В строим план скоростей согласно векторному уравнению:
 .
.

Рис. 8.1. Механизм с указанием направлений скоростей всех точек
Рис. 8.2. План скоростей
Для этого из произвольно выбранного полюса p проводим луч Оа, в выбранном масштабе скорость точки А. Затем через конец вектора VА проводим направление  , перпендикулярно звену АВ, а из полюса p проводим направление скорости
, перпендикулярно звену АВ, а из полюса p проводим направление скорости  перпендикулярно звену О2В. На пересечении этих направлений получаем точку в, отрезок p в определяет скорость точки В. Измеряем длину луча p в и, пользуясь масштабным коэффициентом по скоростям, получаем:
перпендикулярно звену О2В. На пересечении этих направлений получаем точку в, отрезок p в определяет скорость точки В. Измеряем длину луча p в и, пользуясь масштабным коэффициентом по скоростям, получаем:
 .
.
Так как  , то конец вектора будет находиться на пересечении направлений векторов скоростей
, то конец вектора будет находиться на пересечении направлений векторов скоростей  .
.
Вектор скорости  направлен перпендикулярно СА, вектор
направлен перпендикулярно СА, вектор  направлен перпендикулярно СВ. Пересечение этих направлений происходит в точке С.
направлен перпендикулярно СВ. Пересечение этих направлений происходит в точке С.
Измерив отрезок p с определим:

С помощью векторного уравнения  определяем скорость
определяем скорость  , учитывая что вектор скорости
, учитывая что вектор скорости  направлен перпендикулярно DC,
направлен перпендикулярно DC,  .
.
Из соотношения  определяем
определяем  , а затем
, а затем 
Для определения  составим векторное уравнение
составим векторное уравнение  , построим это векторное уравнение на плане скоростей, определив p f.
, построим это векторное уравнение на плане скоростей, определив p f.

Определяем угловые скорости всех звеньев: 


Определяем скорость точек механизма и угловые скорости звеньев с помощью мгновенных центров скоростей (рис. 8.3)

Рис 8.3. Построение мгновенных центров скоростей
для звеньев механизма.
Определяем условие скорости звеньев:
Полученные результаты сводим в таблицу 8. 2
Таблица 8.2
Результаты решения задачи
| Способ определения | Скорость точек, см/с | Угловые скорости звеньев, рад./с | ||||||||||
| VА | VВ | VС | VD | VE | VF | wABC | wBO2 | wCD | wEF | wO4F | wO5F | |
| План скоростей | 20,5 | 25,5 | 0,57 | 0,96 | 0,81 | 0,58 | 1,27 | 0,18 | ||||
| С помощью МЦС | 8,6 | 25,8 | 0,55 | 0,84 | 0,58 | 1,29 | 0,17 |
Определяем ускорение точек А и В, а также угловое ускорение звена АВ с помощью построения плана ускорения. Для этого выделим часть механизма содержащую звено АВ (рис. 8.4).
Составим векторное уравнение:

Кривошип О1А вращается равномерно, ускорение точки А направлено к центру О1 и равно:

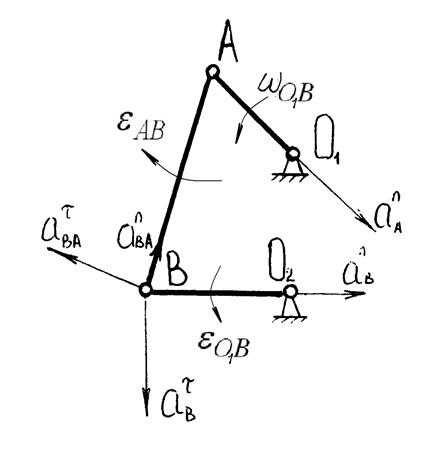
Рис. 8.4.. Часть механизма с указанием направлений
характерных ускорений
Рис. 8.5. План ускорений
Вектор  направляется от точки А к центру вращения О1. Центростремительное ускорение точки В во вращательном движении шатуна АВ направлено от точки В к точке А и равно:
направляется от точки А к центру вращения О1. Центростремительное ускорение точки В во вращательном движении шатуна АВ направлено от точки В к точке А и равно:

Центростремительное ускорение точки В во вращательном движении шатуна О2В направлено от точки В к точки О2 и равно

Ускорения  и
и  определить невозможно, но известны направления этих ускорений:
определить невозможно, но известны направления этих ускорений:  направлено перпендикулярно АВ, а вектор
направлено перпендикулярно АВ, а вектор  направлен перпендикулярно О2В.
направлен перпендикулярно О2В.
Для определения величины и строим план ускорения. Введем масштабный коэффициент по ускорениям:
 .
.
Из плана ускорений (рис.5) с учетом масштабного коэффициента определяем:
 ;
;
 .
.
С помощью полученных данных определяем угловые ускорения звеньев (рис. 8.5):
Определяем положение мгновенного центра ускорения звена АВ (рис. 8.6)
Примем точку А за полюс. Тогда ускорение точки В равно:
 .
.
Строим параллелограмм ускорений точке В по диагонали  и стороне
и стороне  Сторона параллелограмма
Сторона параллелограмма  выражает ускорение точки В во вращении АВ вокруг полюса А. Ускорение составляет с отрезком АВ угол a, который можно измерить на чертеже.
выражает ускорение точки В во вращении АВ вокруг полюса А. Ускорение составляет с отрезком АВ угол a, который можно измерить на чертеже.
Рис. 8.6. Построение мгновенного центра ускорений
Направление вектора  относительно полюса А позволяет определить направление
относительно полюса А позволяет определить направление  , в данном случае соответствующее направлению вращения часовой стрелки. Отложив угол
, в данном случае соответствующее направлению вращения часовой стрелки. Отложив угол  от векторов и
от векторов и  в этом направлении и проведя две полупрямые, найдем точку их пересечения QAB – мгновенный цент ускорений звена АВ.
в этом направлении и проведя две полупрямые, найдем точку их пересечения QAB – мгновенный цент ускорений звена АВ.
Практическое занятие 9