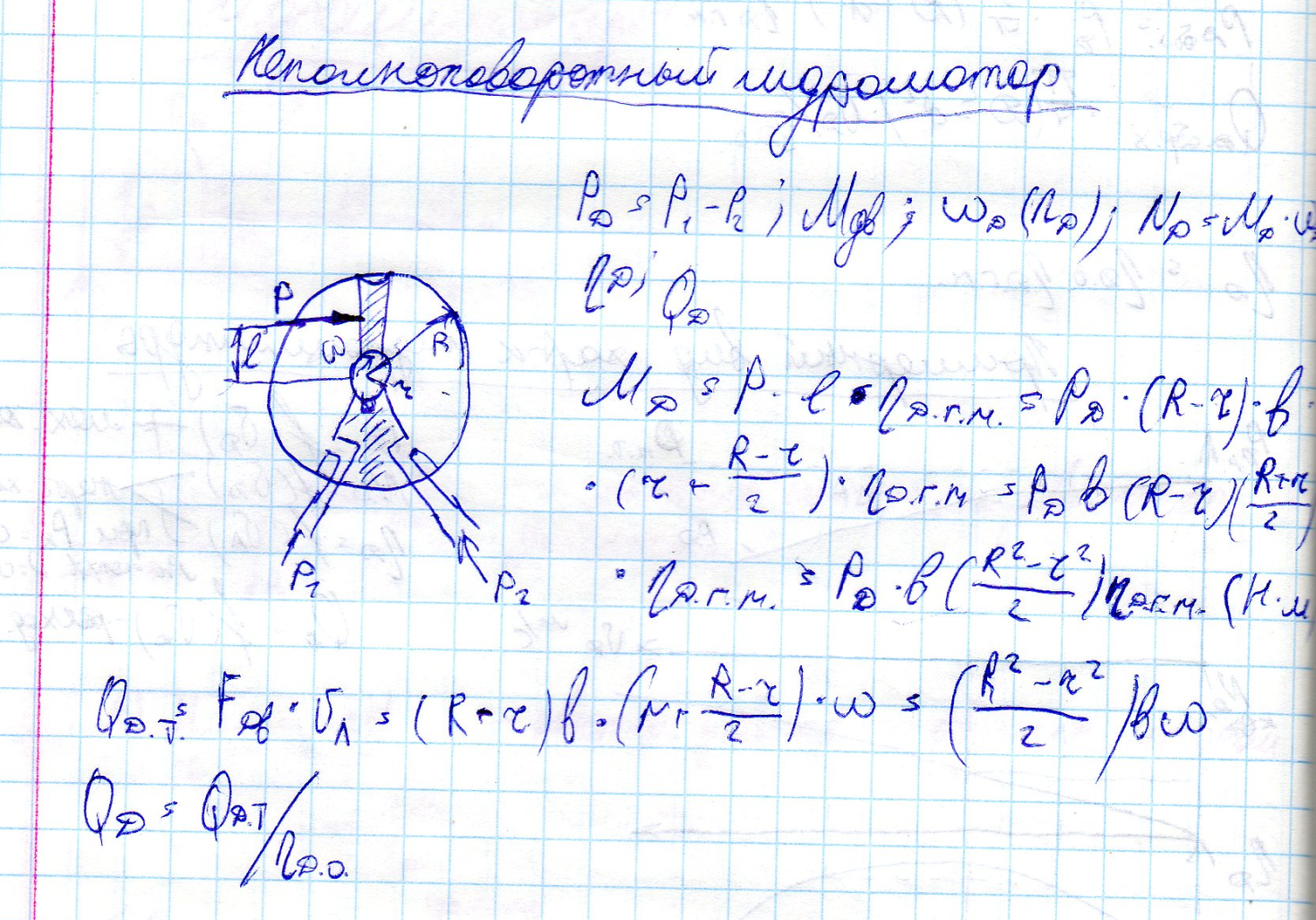
Неполноповоротный гидромотор- вал совершает ограниченное вращательное движение(до 300градусов)
12 Регулирование подачи насоса в сеть. Сравнение различных способов регулировки.

Вопрос 14
а) ГП с дроссельным регулированием скорости выходного звена при параллельном включении г/дросселя.
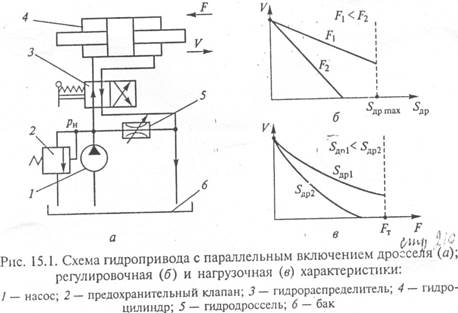
Регулирование скорости выходного звена (штока г/цилиндра 4) обеспечивается за счет
Основной недостаток:
При расходе РЖ через г/дроссель 5 (Qдр) расход РЖ, поступающей в г/цилиндр, можно рассчитать по формуле:
Qгц = Qн — Qдр 1
Где: Qн — подача насоса.
Расход Qдр при коэффициенте расхода µ:
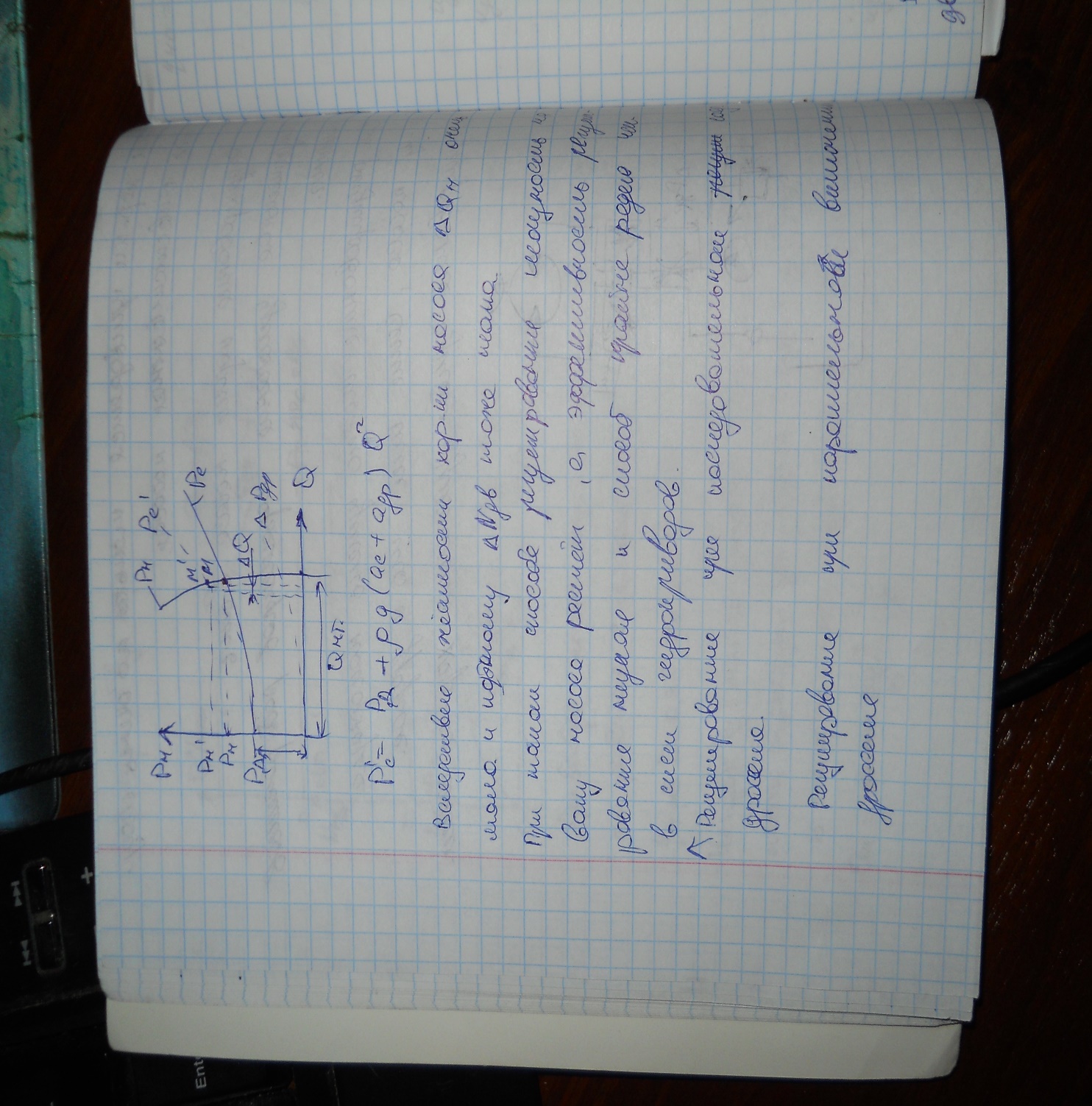
Qдр = µ·Sдр·√2∆Рдр /ρ 2
т.к ∆Рдр = ∆Ргц, его можно найти из формулы F = ∆P∙S∙ηм:
∆Рдр = ∆Ргц = F /Sп, следовательно, скорость движения штока г/цилиндра можно рассчитать по формуле: ______
υ = Qгц / Sп = 1 /Sп·[Qн - µ·Sдр·√2F /ρ·Sп 3
Из 3 видно, что скорости движения выходного звена в таком ГП будет меняться за счет изменения площади проходного сечения (Sдр) регулируемого г/дросселя 5, включенного параллельно г/двигателю.
Регулировочная характеристика,представляющая собой
Графическая зависимость υ = f(F) получила название
Вопрос 13
б) ГП с дроссельным регулированием скорости выходного звена при последовательном включении г/дросселя.
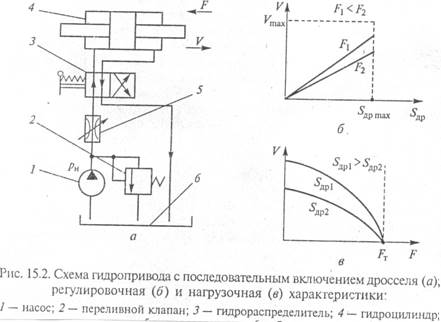
Т.к г/дроссель и г/цилиндр включены последовательно, то расход РЖ, поступающей в г/цилиндр, расходу РЖ, проходящей через регулируемый г/дроссель.
Qгц = Qдр = µ·Sдр·√2∆Рдр /ρ 4
С учетом допущений ∆Рдр = Рн - ∆Ргц = Рн - F /Sп
В данном ГП давление на выходе насоса поддерживается постоянным при помощи переливного клапана. Тогда скорость поршня можно определить по формуле:
υ = Qгц / Sп = µ·Sдр /Sп ·√2 /ρ·(Рн - F /Sп) 5
Из 5 видно, что скорость движения поршня г/цилиндра также является функцией двух переменных: υ = f(Sдр) и υ = f(F)
Основной недостаток тот же:
Поэтому в ГП, работающих в знакопеременных нагрузках, рекомендуется устанавливать
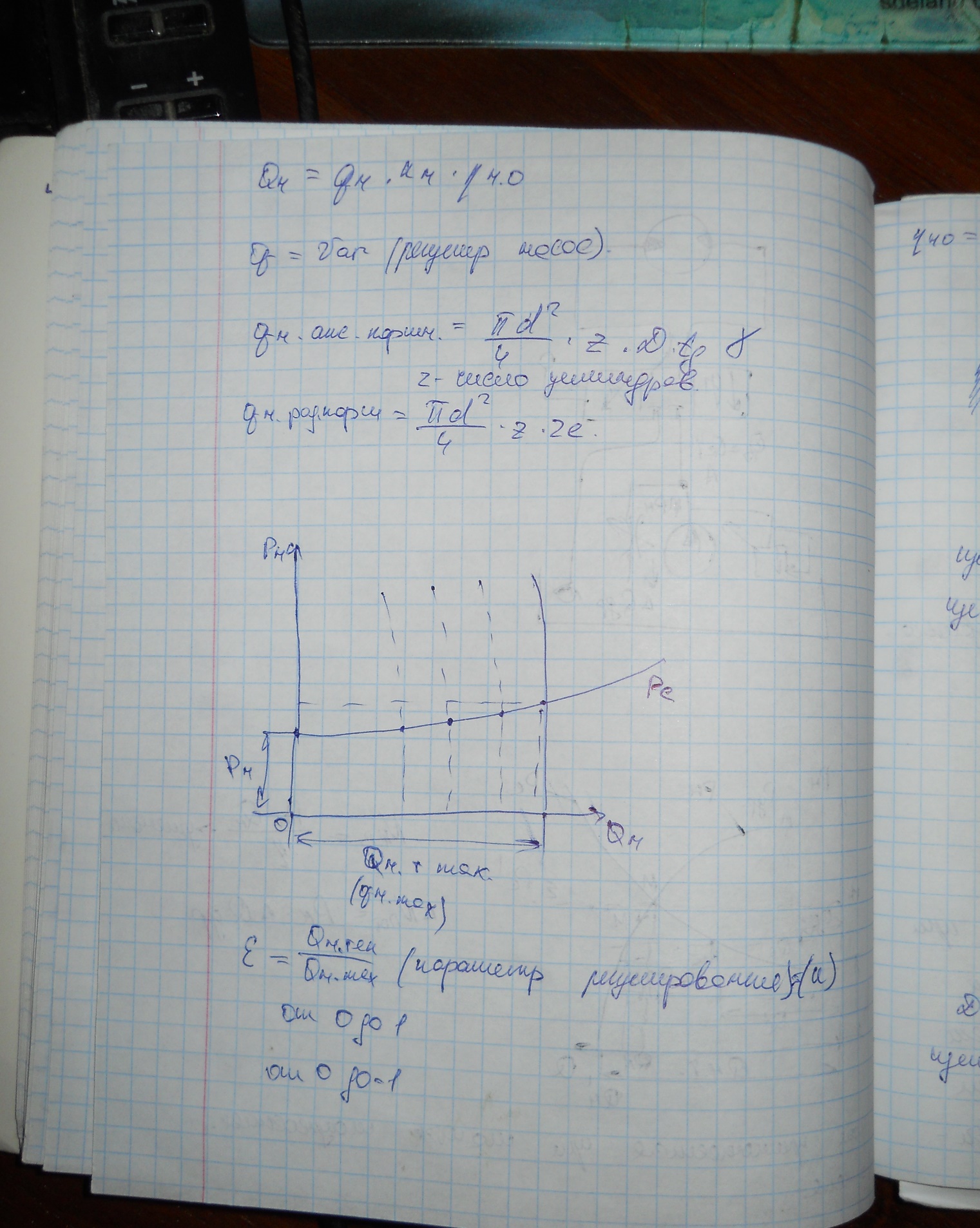
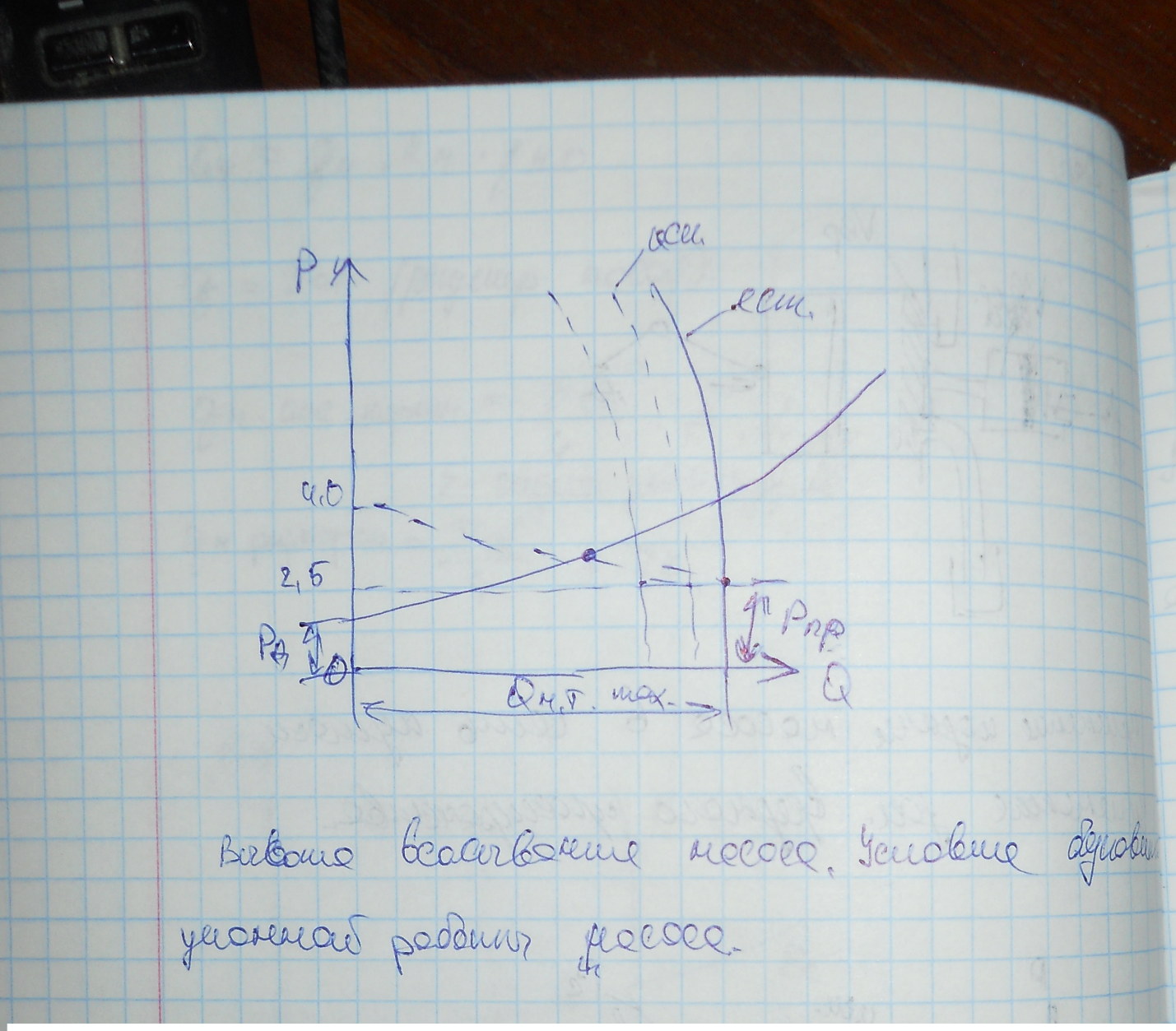
15 Объёмное регулирование гидропривода
Объёмное регулирование гидропривода — способ регулирования скорости движения штока гидроцилиндра или частоты вращения вала гидромотора (или угловой скорости вала поворотного гидродвигателя) за счёт изменения рабочего объёма гидравлических машин.
Возможны два принципиально разных варианта объёмного регулирования:
за счёт изменения рабочего объёма насоса,
за счёт изменения рабочего объёма гидродвигателя,
а также возможно сочетание в себе обоих указанных вариантов.
В качестве регулируемых объёмных гидромашин как правило используются аксиально-плунжерные и радиально-плунжерные гидромашины. Реже применяются пластинчатые гидромашины.
В сравнении с дроссельным регулированием гидропривода, при объёмном регулировании лучше регулировочные характеристики (зависимость скорости движения выходного звена гидродвигателя от нагрузки), выше КПД гидропривода и меньше энергетические потери.
Поскольку регулируемые объёмные гидромашины достаточно дороги, то объёмное регулирование применяется в гидроприводах большой мощности, а также в гидроприводах, имеющих длительное время работы и малое время простоя.
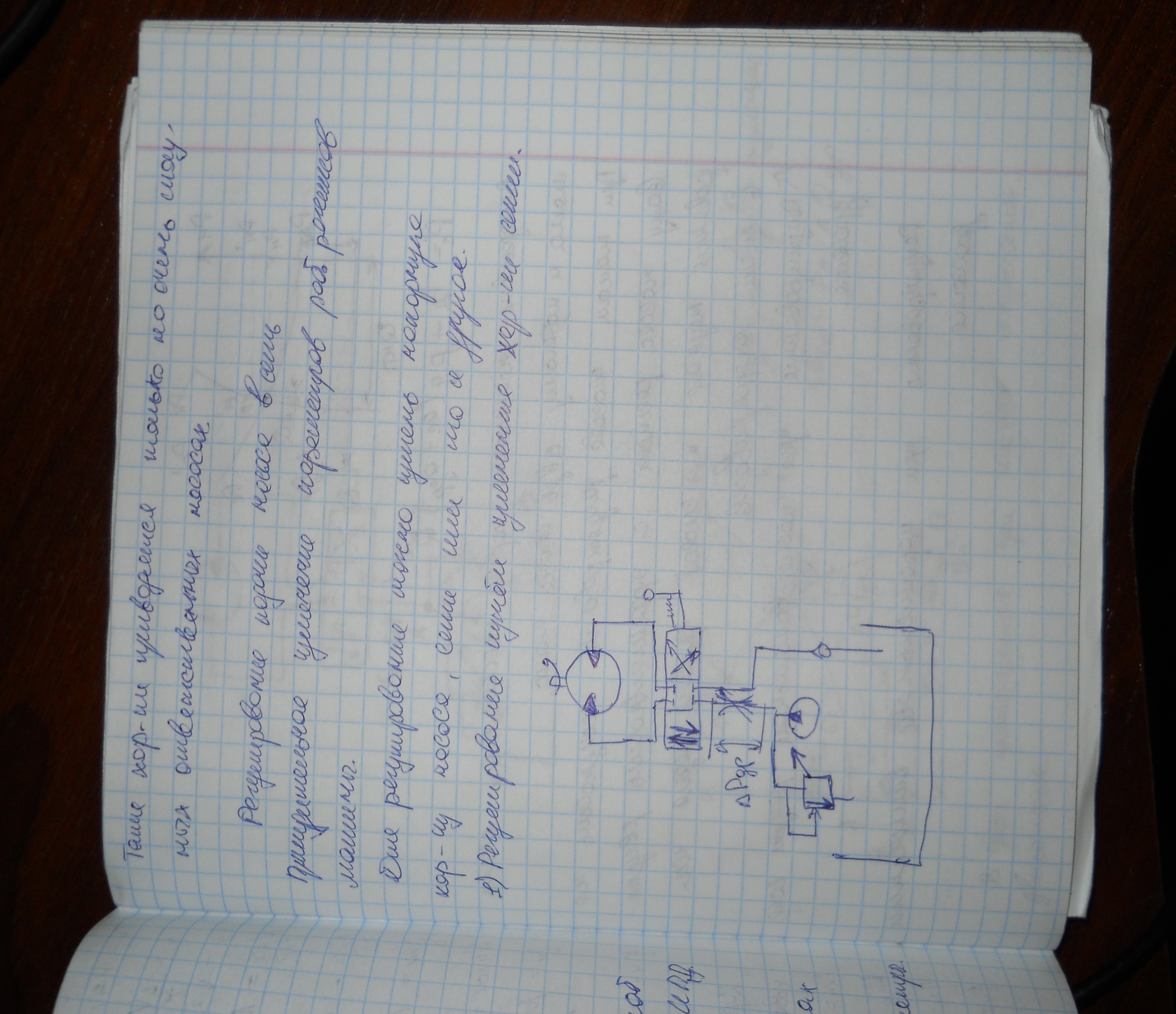
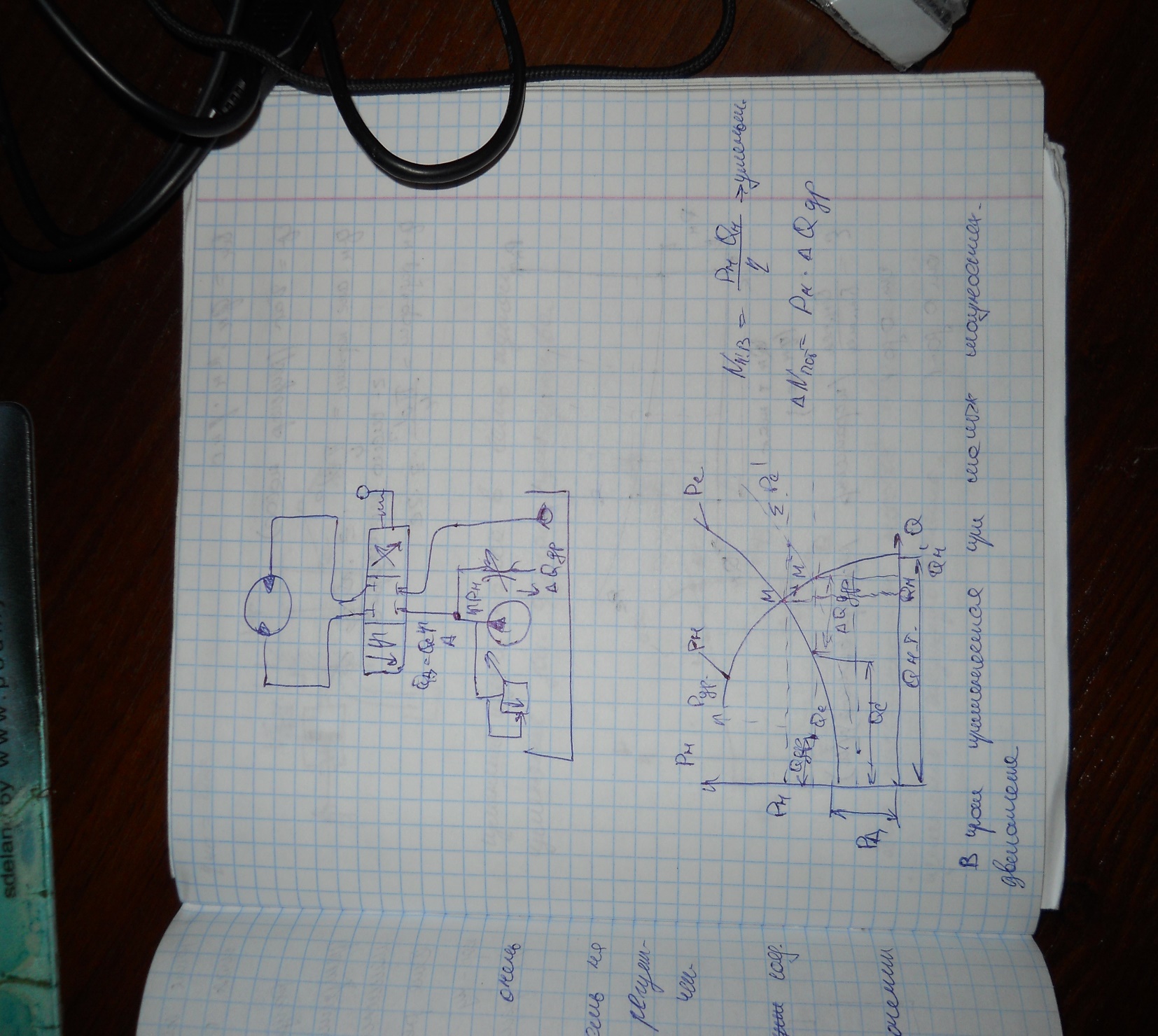
При объемном регулировании требуемая скорость выходного звена гидродвигателя достигается путем изменения подачи насоса источника энергопитания, что можно осуществить в гидроприводе, гидродвигатель которого непосредственно соединен с регулируемым насосом (рис.2). Чтобы изменять направление движения выходного звена гидродвигателя, насос должен быть реверсивным по отношению к направлению подаваемой им жидкости под давлением. В некоторых гидроприводах применяют гидродвигатели с регулируемыми рабочими объемами. Такие гидродвигатели могут иметь общий централизованный источник питания.
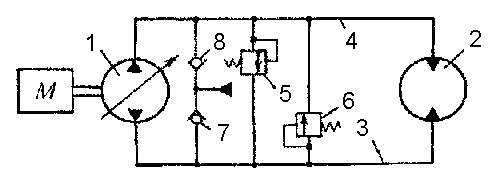
Схема гидропривода с объемным регулированием
Рис.2 Схема гидропривода с объемным регулированием:
1 - насос с реверсивно-регулируемой подачей; 2 - гидродвигатель; 3 и 4 - гидролинии;
5 и 6 - предохранительные клапаны; 7 и 8 - обратные клапаны.
Недостаток регулируемых объемных гидродвигателей состоит в том, что при изменении рабочего объема изменяется не только скорость выходного звена, но и создаваемый жидкостью вращающий момент. Эта особенность регулируемого объемного гидродвигателя может быть причиной неустойчивости гидропривода в окрестности положения равновесия выходного звена. Объемное регулирование по сравнению с дроссельным сопровождается меньшими потерями энергии жидкости.