Как устроен манипулятор?
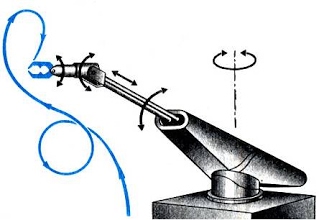
Манипулятор состоит из шарнирно соединенных звеньев, как рука человека из костей, связанных суставами. Манипуляторы включают в себя подвижные звенья двух типов:
| звенья, обеспечивающие поступательные движения; | звенья, обеспечивающие вращательные перемещения. |
Сочетание и взаимное расположение звеньев определяет степень свободы (подвижности) робота, а также область действия манипуляционной системы робота.

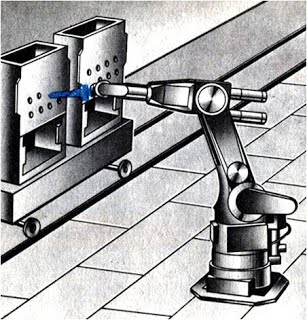
 Последнее (рабочее) звено манипулятора может быть захватывающим или специализированным. Захватывающее звено, называемое схватом, является аналогом кисти человеческой руки. Схват служит для удержания и переноса предметов. Специализированное звено – звено с закрепленным инструментом, например для сверления, резки, сварки.
Последнее (рабочее) звено манипулятора может быть захватывающим или специализированным. Захватывающее звено, называемое схватом, является аналогом кисти человеческой руки. Схват служит для удержания и переноса предметов. Специализированное звено – звено с закрепленным инструментом, например для сверления, резки, сварки.
Совместные перемещения звеньев позволяют схвату описывать в пространстве (ограниченном размерами и конструкцией манипулятора) траекторию практически любой формы.
 |
Выделяют механические и немеханические схваты.
Механические схваты:
| Двухпальцевый схват | Трехпальцевый схват | Многопальцевый схват | |||
| 
| 
|

Немеханические схваты:
| Магнитный схват | Вакуумный схват |

| 
|
Иногда последним звеном манипулятора служит не схват, а в зависимости от предназначения робота соответствующий рабочий инструмент: дрель, гаечный ключ, краскораспылитель, сварочная горелка, медицинский инструмент и др. Робот с таким манипулятором может быть "сварщиком, маляром, хирургом и т. д.
| Схват-дрель |
|
| Схват-инструмент хирурга | Схват – пульверизатор с краской |

|

|
Как работают манипуляторы?
Перемещение звеньев манипулятора обеспечивают так называемые приводы - аналоги мускулов в руке человека. Приводы являются источниками механической энергии, нужной для движения звеньев.
· Если источником механической энергии служит электродвигатель, то привод называют электрическим.
· Если таким источником является гидропривод, то его называют гидравлическим.
· Если таким источником является пневмоцилиндр, то привод называют пневматическим.

Свойства Приводов
Электропривод обладает рядом достоинств: не загрязняет окружающую среду отработанным газом или маслом, относительно малошумен; к тому же современные полупроводниковые схемы управления дешевы и надежны в работе. Все эти качества делают электропривод наиболее перспективным как в настоящем, так и в будущем.
В гидравлическом приводе используется гидроцилиндр. На рисунке показана схема такого привода, сообщающего "руке" робота возвратно-поступательное движение. Принцип его действия следующий. В цилиндр 1, в котором находится поршень 2, соединенный с помощью штока с манипулятором 3, поступает под давлением жидкость (отсюда название - гидроцилиндр); она-то и заставляет передвигаться поршень, а вместе с ним "руку" робота.
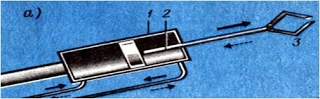
Гидравлический привод имеет свои преимущества. Прежде всего, это сравнительно небольшая масса привода и высокое быстродействие. Важное свойство гидропривода - возможность получения с его помощью малой скорости при сохранении плавности перемещения. Благодаря этим качествам гидропривод получил широкое распространение в мощных промышленных роботах.
Пневматический привод аналогичен гидравлическому; в нем роль двигателя выполняет пневмоцилиндр, т. е. цилиндр, в котором поршень перемещается под действием сжатого воздуха. Особенностью пневмопривода является то, что используемое в нем рабочее вещество - воздух - легко сжимается, вследствие этого пневмопривод используется лишь для роботов, производящих операции с мелкими и легкими деталями, например, в технологических процессах приборостроения, часовой промышленности и пр. Другая причина, сдерживающая применение роботов с пневмоприводом - шум, которым сопровождается выброс из пневмоцилиндра отработавшего воздуха.
Вывод:
Итак, привод, являясь "мускулом" манипулятора, приводящим его в движение, во многом определяет, каков снабженный этим приводом робот: насколько он силен (какова его грузоподъемность), ловок (как точно он может выполнить заданное действие), быстр (сколько ему надо на это времени) и др.
Управление манипуляторами подразделяется на:
· Программное управление — самый простой тип системы управления, используется для управления манипуляторами на промышленных объектах. В таких роботах отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются. Программное управление производится с помощью ПК или программируемого логического контроллера.
· Адаптивное управление — управление, основанное на показаниях датчиков. Сигналы, передаваемые датчиками, анализируются и в зависимости от результатов принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д.
· Управление человеком (например, дистанционное управление).

Задание
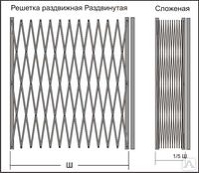
Рассмотрите картинки следующих механизмов и обсудите принцип их действия:
| Складная линейка | Складные решетки на окна | Механические щипцы-захваты |

| 
| 
|
Задание по конструированию 1
На основе принципа действия рассмотренных механизмов, используя балки и штифты, создать механический многозвеньевой манипулятор, способный изменять длину и захватывать детали.
Требования к конструкции следующие:
· Манипулятор-хватательный механизм должен иметь минимальную длину в сложенном состоянии и максимальную в разложенном;
· У манипулятора должно быть две ручки, как у щипцов, многоколенчатое соединение, ведущее к схвату - хватательной части манипулятора;
· Изобретатель должен суметь взять с помощью схвата некоторый предмет и перенести его с места на место.
При оценке манипулятора будут производиться следующие измерения:
1. Измерение габаритов (длина, ширина) в сложенном состоянии.
2. Измерение габаритов (длина, ширина) в разложенном состоянии
3. Захват мелкой, средней и крупной детали.
По итогам измерений будет выбран лучший манипулятор.