Все асинхронные двигатели с короткозамкнутым ротором в момент пуска кратковременно потребляют пусковой ток в 5—7 раз больший, чем их номинальный рабочий ток, указанный в паспорте двигателя. Объясняется это тем, что в момент включения, когда ротор двигателя еще неподвижен, его короткозамкнутая обмотка пересекается вращающимся магнитным полем статора. В обмотке ротора индуктируется большая ЭДС, которая и создает в короткозамкнутой якорной обмотке, имеющей малое сопротивление, значительный ток. Вокруг обмоток ротора возникнет магнитное поле. Магнитное поле ротора будут взаимодействовать с вращающимся магнитным полем возбуждения и вызовут вращение ротора, причем ротор будет следовать за вращающимся магнитным полем статора. Скорость вращения ротора всегда меньше скорости вращения магнитного поля.
 Работа асинхронного двигателя похожа на работу трансформатора. Первичной обмоткой здесь являются обмотки статора, а вторичной - обмотка ротора. Сравнение двигателя и трансформатора помогает объяснить, почему по обмоткам статора двигателя в момент пуска протекает значительный ток. При увеличении тока во вторичной обмотке трансформатора возрастает ток, потребляемый его первичной обмоткой. Поэтому вследствие значительного возрастания тока в роторе увеличивается токи в обмотке статора. В питающей сети при внезапном увеличении тока ощутимо падает напряжение, что отрицательно сказывается на работе соседних потребителей: уменьшается накал ламп, понижаются обороты двигателей, приводит к сбою в работе электронных приборов.
Работа асинхронного двигателя похожа на работу трансформатора. Первичной обмоткой здесь являются обмотки статора, а вторичной - обмотка ротора. Сравнение двигателя и трансформатора помогает объяснить, почему по обмоткам статора двигателя в момент пуска протекает значительный ток. При увеличении тока во вторичной обмотке трансформатора возрастает ток, потребляемый его первичной обмоткой. Поэтому вследствие значительного возрастания тока в роторе увеличивается токи в обмотке статора. В питающей сети при внезапном увеличении тока ощутимо падает напряжение, что отрицательно сказывается на работе соседних потребителей: уменьшается накал ламп, понижаются обороты двигателей, приводит к сбою в работе электронных приборов.
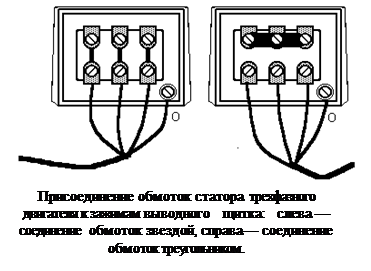
 На щитке трехфазного двигателя имеется шесть зажимов. К ним присоединяют три начальных и три конечных вывода от трех катушек обмотки статора так, чтобы зажимы концов каждой катушки находились не против зажимов начала, а были смещены в сторону на один зажим. Это делают для удобства переключения двигателя со звезды на треугольник. Такое переключение необходимо, например, для присоединения того же самого двигателя как к трехфазной сети с напряжением 380/220В, так и к сети с напряжением 220/127В.
На щитке трехфазного двигателя имеется шесть зажимов. К ним присоединяют три начальных и три конечных вывода от трех катушек обмотки статора так, чтобы зажимы концов каждой катушки находились не против зажимов начала, а были смещены в сторону на один зажим. Это делают для удобства переключения двигателя со звезды на треугольник. Такое переключение необходимо, например, для присоединения того же самого двигателя как к трехфазной сети с напряжением 380/220В, так и к сети с напряжением 220/127В.
Для этого каждую фазу обмотки статора двигателя рассчитывают чаще всего на рабочее напряжение 220В, общее для обеих сетей. При питании двигателя от сети 380/220В обмотки двигателя соединяют звездой. Тогда к каждой из обмоток будет подведено фазное напряжение этой сети, а именно — 220В. Наоборот, в сети с напряжением 220/127Вобмотки двигателя переключают на треугольник. Тогда каждая его обмотка будет включена между двумя линейными проводами сети, и будет находиться под линейным напряжением, которое в этой сети равно тем же 220В.
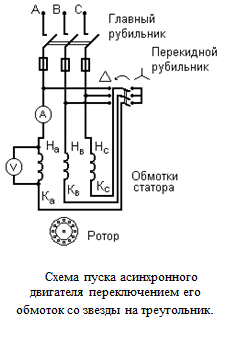
Для уменьшения пускового тока двигателя можно понизить напряжение, подаваемое на обмотки его статора. Для этого на время пуска двигателя статорные обмотки соединяют звездой (т. е. на фазное напряжение), а после того как ротор начнет вращаться, переключают обмотки на треугольник — под увеличенное в 1,73 раза линейное напряжение. Быстрое переключение обмоток осуществляют перекидным рубильником или специальным барабанным переключателем. Ясно, что такой способ пуска можно применять только для тех двигателей, обмотки которых при нормальной работе соединены треугольником.
Одновременно следует отметить, что асинхронные двигатели небольших мощностей (до 10КВт ), у которых пусковой ток сравнительно невелик, включаются в сеть непосредственно — без всяких вспомогательных устройств. Сейчас включают без вспомогательных устройств короткозамкнутые двигатели мощностью до 100КВт(если позволяет мощность питающей сети).
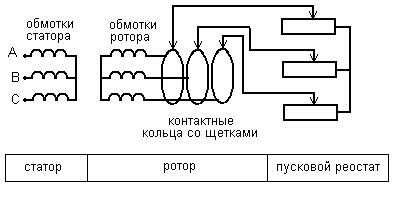 Для снижения пускового тока и увеличения крутящего момента на роторе при пуске двигателя можно использовать двигатели с фазными роторами. Ротор такого двигателя имеет три явных полюса, обмотки которых соединены по схеме звезды. Выводы этих обмоток через контактные кольца и щетки соединения с пусковым трехфазным реостатом. Перед включением двигателя сопротивление реостатов выводится на максимальное значение, а затем, после разгона, возвращается на минимум. Вращающееся магнитное поле возбуждения создаст в обмотках ротора э.д.с., но величина тока будет ограничена пусковым реостатом. Ротор начнет раскручиваться, при этом ток в ротной обмотке будет приблизительно равен номинальному току, то есть на роторе возникнет крутящий момент соизмеримый или более номинального. После разгона двигателя, для увеличения его мощности, пусковой реостат надо вывести на минимальное сопротивление. Далее машина работает как асинхронный двигатель с короткозамкнутым ротором. Следует отметить, что этот способ весьма дорог, и требует дополнительный контроль над работой двигателя при пуске. При несвоевременном возврате пускового реостата на минимальное сопротивление ротор не сможет разогнаться, возможен перегрев реостатов и выход двигателя из строя,
Для снижения пускового тока и увеличения крутящего момента на роторе при пуске двигателя можно использовать двигатели с фазными роторами. Ротор такого двигателя имеет три явных полюса, обмотки которых соединены по схеме звезды. Выводы этих обмоток через контактные кольца и щетки соединения с пусковым трехфазным реостатом. Перед включением двигателя сопротивление реостатов выводится на максимальное значение, а затем, после разгона, возвращается на минимум. Вращающееся магнитное поле возбуждения создаст в обмотках ротора э.д.с., но величина тока будет ограничена пусковым реостатом. Ротор начнет раскручиваться, при этом ток в ротной обмотке будет приблизительно равен номинальному току, то есть на роторе возникнет крутящий момент соизмеримый или более номинального. После разгона двигателя, для увеличения его мощности, пусковой реостат надо вывести на минимальное сопротивление. Далее машина работает как асинхронный двигатель с короткозамкнутым ротором. Следует отметить, что этот способ весьма дорог, и требует дополнительный контроль над работой двигателя при пуске. При несвоевременном возврате пускового реостата на минимальное сопротивление ротор не сможет разогнаться, возможен перегрев реостатов и выход двигателя из строя,
Пусковые характеристики асинхронного двигателя с короткозамкнутым ротором могут быть существенно улучшены, если обмотка ротора имеет двойную беличью клетку. Такой ротор снабжен двумя клетками, лежащими одна над другой: наружной — пусковой и внутренней - рабочей. Материалом стержней наружной клетки обычно служит марганцовистая латунь, т. е. материал с повышенным по сравнению с медью удельным сопротивлением. Материалом стержней внутренней клетки служит медь. Кроме того, у стержней внутренней клетки обычно площадь поперечного сечения больше. Активное сопротивление наружной клетки значительно больше активного сопротивления внутренней (в 4-5 раз). Обе клетки снабжены с торцевых сторон замыкающими кольцами. В первый момент пуска двигателя частота токов в обмотке ротора равна частоте питающей сети. Значит и ток, генерируемый в стержнях беличьего колеса, имеет частоту близкую к частоте питающей сети. Токи высокой частоты стремятся распределиться по поверхности проводника и поэтому вытесняются на внешнюю обмотку, имеющую большое сопротивление. При разгоне ротора частота тока в стержнях беличьего колеса уменьшается, и токи располагаются равномернее, а так как внутреннее колесо имеет меньшее сопротивление, оно принимает нагрузку преимущественно на себя. Таким образом, суммарное сопротивление обмоток ротора изменяется от максимума в момент пуска минимума в режиме холостого хода, что аналогично процессам в фазном роторе. Упрощенным вариантом двойного беличьего колеса можно считать ротор с вытянутыми в глубину тела сердечника стержнями – ротор с глубоким пазом. Обмотка ротора этого двигателя изготовляется из прямоугольных стержней малой ширины и большой высоты, которые помещаются в соответствующие глубокие пазы в сердечнике ротора. Переменный ток распределяется по сечению стержня неравномерно, как и необходимо. Это равносильно увеличению сопротивления обмотки ротора, так что повышается начальный момент двигателя. При рабочей частоте вращения двигателя ток распределяется по сечению стержня почти равномерно, и двигатель работает как обычный короткозамкнутый.
Направление вращения ротора трехфазного двигателя зависит от направления движения вращающегося магнитного поля статора. Чтобы изменить направление движения магнитного поля (отчего изменится и направление вращения ротора), нужно поменять местами два каких-нибудь линейных провода, которые подходят к обмотке статора двигателя.
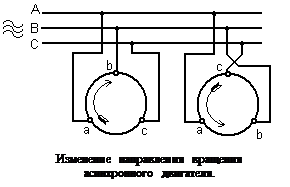 На рисунке схематически изображен способ изменения направления вращения трехфазного двигателя. Обратный ход (реверсирование) двигателя достигается перестановкой двух линейных проводов на клеммной колодке двигателя.
На рисунке схематически изображен способ изменения направления вращения трехфазного двигателя. Обратный ход (реверсирование) двигателя достигается перестановкой двух линейных проводов на клеммной колодке двигателя.
Когда необходимо часто изменять направления вращения двигателя (например, в токарных станках, грузоподъёмных механизмах), устанавливают специальный переключатель или реверсивный магнитный пускатель с тремя кнопками: «Вперед», «Стоп» и «Назад».
Регулирование скорости ротора асинхронных двигателей достигается изменением скорости вращения магнитного поля возбуждения статора. Скорость магнитного поля статора определяется формулой:
nо=60×f/p,
где no – скорость вращения магнитного поля или синхронная скорость двигателя;
f – частота тока питающей сети;
p – число пар полюсов, конструкционный элемент двигателя, задаваемый при проектировании и изготовлении двигателя.
До недавнего времени плавное регулирование скорости было весьма затруднено из-за сложностей в плавном изменении частоты тока питающей сети. Реальным оставался вариант изменение скорости за счет изменения пар полюсов. Но этот способ требовал подключение двигателя к питающей сети через сложную коммутирующую аппаратуру, и допускал только ступенчатое регулирование. При частоте тока 50Гц скорость магнитного поля равнялась 3000 об/мин; 1500 об/мин; 1000 об/мин. Дальнейшее увеличение пар полюсов существенно удорожало двигатель и использовалось редко.
Наиболее перспективным методом управления частотой вращения асинхронного двигателя является регулирование частоты тока в обмотках статора двигателя. Развитие полупроводниковой техники позволило создать недорогой, мощный и компактный преобразователь, позволяющий изменять частоту тока и напряжения в достаточно широких пределах при сохранении крутящего момента на валу двигателя. При этом надо учитывать, что соотношение напряжения и частоты должно быть постоянным: U/f=const. Если регулировать частоту тока и напряжение, соблюдая указанное условие, то механические характеристики двигателя будут оставаться жесткими, а максимальный момент почти не зависящим от частоты (он существенно уменьшается лишь при относительно низких частотах). В то же время мощность будет изменяться пропорционально частоте тока. Например, при уменьшении частоты тока в 2 раза вдвое уменьшается и мощность на валу двигателя.
Как было сказано ранее, скорость ротора всегда меньше скорости вращения магнитного поля на величину скольжения. Скольжение определяется как относительная разность между скоростью магнитного поля и ротора, выраженную в процентах или долях от единицы.
s =(no-n)/ no×100%
где s – скольжение, выраженное в процентах (если не будет сомножителя 100% - в долях от единицы);
n – реальная скорость ротора.
Очевидно, что скорость двигателя определяется, кроме частоты тока питающей сети, ещё и крутящим моментом на роторе. А крутящий момент меняется в зависимости от нагрузки и напряжения питающей сети. Нагрузка создает торможение ротору, а напряжение питающей сети определяет токи в обмотках и, следовательно, сцепление магнитных полей на обмотках статора и ротора.
При холостом ходе, когда двигатель питается номинальным напряжением, s=1%…3% (0,01…0,03). При номинальных значениях напряжения и мощности s=6%…12% (0,06…0,12). Двигатель, скольжение в котором более 20% (0,2) считается перегруженным. В момент пуска s=100%(1,0). Изменение напряжения питающей сети так же может повлиять на скольжение и, как следствие, на скорость двигателя ПОД НАГРУЗКОЙ! В устоявшемся режиме холостого хода скорость ротора определяется частотой тока питающей сети и конструкцией двигателя, но не напряжением (кроме очень низкого напряжения, когда крутящего момента не достаточно для преодоления внутренних потерь в двигателе)!
Контрольные вопросы.
1. Объясните принцип действия асинхронного двигателя трехфазного тока.
2. Каким способом изготовлен короткозамкнутый ротор двигателя, который использовался в практической работе?
3. Почему в момент пуска двигатель с короткозамкнутый ротором потребляет ток, значительно превышающий величину его номинального тока? Чем это опасно?
4. Как изменить направление вращения трехфазного асинхронного двигателя?
5. Когда двигатели трехфазного тока при подключении к сети соединяют звездой и когда — треугольником?
6. В каком порядке размещены на щитке двигателя выводные концы обмоток статора?
7. Как располагаются перемычки и провода питающей сети при подключении двигателя по схеме звезды или треугольника?
8. Для чего во время пуска некоторых асинхронных двигателей их обмотки соединяют сначала звездой, а потом треугольником?
9. Расскажите о способах понижения пускового тока в асинхронных двигателях.
10. Как можно повысить пусковой крутящий момент на роторе асинхронного двигателя?
11. С какой целью ротор асинхронной машины изготавливается с двойным беличьим колесом?
12. В чем особенность работы двигателя с глубоким пазом сердечника ротора.
13. Что такое синхронная скорость двигателя?
14. Рассказать о способах регулирования скорости ротора асинхронного двигателя.
15. В чем заключается ступенчатое регулирование скорости асинхронного двигателя?
16. Рассказать о сущности частотного регулирования скорости ротора асинхронного двигателя.
17. Что такое скольжение и как на него влияют условия работы асинхронного двигателя?