Лабораторная работа №3
1. Название: «Плоское движение. Трение качения ».
Целью выполнения лабораторной работы является достижение следующих результатов образования (РО):
знания:
на уровне представлений: иметь представление о назначении механизмов, их характеристиках, методах анализа и синтеза, о современных проблемах машиностроения
на уровне воспроизведения: уметь грамотно и эффективно проводить анализ устройств механических систем, решать вопросы проектирования этих систем.
на уровне понимания: понимать принцип работы механизмов; конструкцию отдельных деталей и узлов, применяемых в ЛА. знать структуру механических систем, реальные схемы применяемых в современной технике механизмов и отдельных узлов устройств механических систем.
умения:
теоретические: определять передаточное отношение и число оборотов любого звена механизма; определять геометрические параметры деталей;
практические: уметь проводить конкретные расчеты, используя методы математического анализа и других разделов высшей математики навыки.
Перечисленные РО являются основой для формирования следующих компетенций: (в соответствии с ФГОС ВПО и требованиями к результатам освоения основной образовательной программы (ООП))
общекультурных и профессиональных
ОПК-3 Способность приобретать новые знания в области естественных наук и математики, используя современные образовательные и информационные технологи для уточнения информации о предмете профессиональной деятельности;
2. Теория и методические указания
Плоское движение
Плоскопараллельным или плоским движением твердого тела называется такое движение твердого тела, при котором все точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости.
Частным случаем такого движения является вращение твердого тела вокруг неподвижной оси. При вращательном движении все точки тела движутся в плоскостях, перпендикулярных к оси вращения, и, следовательно, любая из этих плоскостей может быть принята за неподвижную, параллельно которой движутся все точки тела.
Плоскопараллельное движение имеет огромное распространение в технике. Подавляющее большинство встречающихся на практике механизмов являются плоскими, т. е. представляют собой сочленение твердых тел, совершающих плоскопараллельное (плоское) движение.

Рисунок 2.1 - Кривошипно-шатунный механизм
Таково, например, движение всех звеньев кривошипно-шатунного механизма (см. рисунок 2.1), состоящего из кривошипа ОА, ползуна В и шарнирно соединенного с ними шатуна АВ. Все точки каждого из, этих звеньев движутся параллельно некоторой неподвижной плоскости (плоскости чертежа на рисунке 2.1). Плоскопараллельное движение кривошипа будет являться вместе с тем и вращательным движением вокруг неподвижной оси О. Плоскопараллельное движение ползуна будет одновременно и поступательным движением вдоль неподвижных направляющих. Плоскопараллельное же движение шатуна не будет ни вращательным (так как шатун не имеет неподвижных точек), ни поступательным (так как прямая АВ не остается при движении шатуна параллельной самой себе).
Для определения плоскопараллельного движения достаточно знать движение неизменяемой плоской фигуры, получающейся при пересечении тела какой-либо плоскостью, параллельной данной неподвижной плоскости. Положение на плоскости неизменяемой плоской фигуры вполне определяется положением двух любых её точек или, что всё равно, положением какого-либо прямолинейного отрезка, неизменно связанного с движущейся фигурой.
Трение качения
Трением называется сопротивление, возникающее при перемещении одного тела по поверхности другого.
В зависимости от характера этого перемещения (от того, скользит ли тело или катится) различают два рода трения: трение скольжения, или трение первого рода, и трение качения, или трение второго рода.
Примерами трения скольжения могут служить: трение полозьев саней о снег, пилы о дерево, подошвы обуви о землю, втулки колеса об ось и т. д. Примерами трения качения служат: трение при перекатывании колес автомобиля по земле или вагона по рельсам, трение при перекатывании круглых бревен, трение в шариковых и роликовых подшипниках и т. д.
Трение является одним из самых распространенных явлений природы и играет очень большую роль в технике. Однако вследствие крайней сложности этого физико-механического явления и трудности оценки многочисленных факторов, на него влияющих, точных общих законов трения до сих пор не существует. На практике в тех случаях, когда не требуется большой точности, все еще продолжают пользоваться эмпирическими законами, установленными в конце XVIII века (1781г.) французским ученым Кулоном, хотя они и представляют собой лишь грубое приближение к действительности.
В случаях же, требующих большей точности, приходится определять величину силы трения из опыта для каждой данной пары трущихся поверхностей и конкретных условий трения.
Трением качения называется сопротивление перекатыванию одного тела по поверхности другого.
Сопротивление это возникает главным образом оттого, что как само катящееся тело, так и тело, по которому оно катится, не являются абсолютно твердыми и потому всегда несколько деформируются в месте их соприкосновения.
Если лежащий на горизонтальной плоскости цилиндрический каток находится только под действием нормального усилия G(рисунок 2.2), то деформации катка и опорной плоскости будут симметричными относительно линии действия силы G. Приводя реакции плоскости, распределенные по малой площадке соприкосновения катка с плоскостью, к одной равнодействующей  , мы будем всегда получать ее равной по модулю и противоположной по направлению силе G.
, мы будем всегда получать ее равной по модулю и противоположной по направлению силе G.
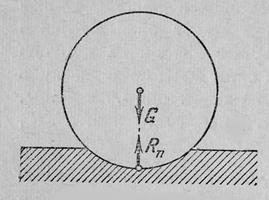
Рисунок 2.2
Основной характеристикой трения качения является коэффициент пропорциональности k, называемыйкоэффициентом трения качения.
Коэффициент трения качения зависит от упругих свойств материалов трущихся тел и состояния их поверхностей. Для данной пары трущихся тел он является величиной постоянной.
Трение при качении в большинстве случаев значительно (во много раз) меньше, чем трение скольжения, поэтому на практике всегда и стремятся заменить там, где это возможно, скольжение качением. Так, когда нужно передвинуть какой-нибудь тяжелый предмет, под него часто подкладывают катки, по которым его и катят, вместо того чтобы просто тащить по земле или полу, т. е. заставлять его скользить.
На принципе замены трения скольжения трением качения основано и устройство широко применяемых в настоящее время роликовых и шариковых подшипников. Преимущество этих подшипников перед подшипниками скольжения, помимо значительно меньших потерь на трение, заключается еще и в том, что их сопротивление при пуске почти равно сопротивлению при установившемся движении (так как трение качения почти не зависит от скорости).
Описание установки
В данной лабораторной работе все испытания проводятся на лабораторном комплексе ЛКМ – 9 (см. рисунок 2.3).
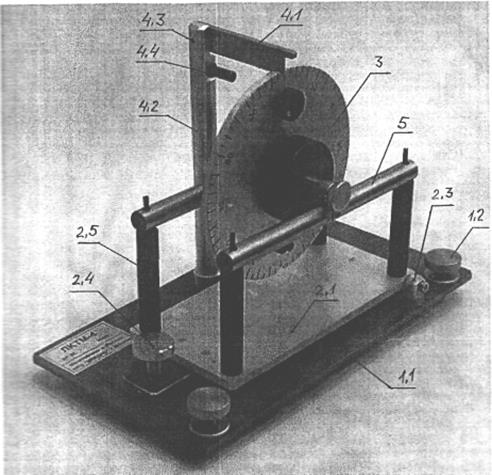
Рисунок 2.3 – Лабораторный комплекс ЛКМ – 9
Платформа-основание (рисунок 2.3, поз.1.1) предназначена для крепления и юстировки механизмов комплекса. Плита 1.1 юстируется с помощью ножек 1.2.
Механизм "Наклонная плоскость" (поз.2) состоит из плиты 2.1, закрепленной с одного края шарнирно в двух стойках 2.3, и опирающейся противоположным краем на плиту-основание посредством опорного винта 2.4. При вращении винта меняется наклон плиты. На плите закреплены четыре стойки 2.5, на стойках лежат два рельса 5. Рельсы и образуют горизонтальную или наклонную плоскость, по которым могут кататься изучаемые объекты. Выступающие из рельс штыри стоек не дают объектам укатиться за пределы рельс.
Наклон плиты удобно изменять с шагом в один оборот винта 2.4. Для отсчета оборотов на головке винта имеется метка. Отсчётное положение винта - меткой к наблюдателю. Первый отсчет - нулевой наклон - соответствует минимальной высоте подъема края платформы винтом. В этом состоянии установку юстируют ножками платформы-основания, добиваясь горизонтального положения рельс. Критерий горизонтальности рельс - положенный на них цилиндр (объект 7.1) не скатывается.
Маховик измерительный (рисунок 2.4) предназначен для изучения плоского движения и для измерения потерь энергии при качении. Маховик содержит ось и диск 3.1,со шкалой 3.2 и двумя двусторонними штырями 3.3. Сборка маховика: на ось маховика симметрично с двух сторон надевают два груза 7.6,затем два сменных ролика 6, затем стягивают получившийся пакет двумя винтами 3.4. Для создания дисбаланса на один из штырей навинчиваются один или два груза-дисбаланса, при этом суммарная масса  грузов может изменяться в диапазоне от 10 до 80 грамм.
грузов может изменяться в диапазоне от 10 до 80 грамм.
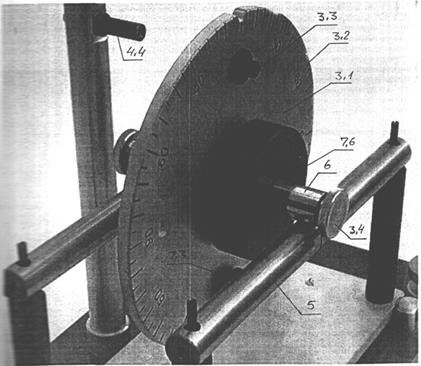
Рисунок 2.4 – Маховик измерительный
Величину дисбаланса характеризуют произведением массы маховика m на смещение l его центра масс от оси маховика (оно же - произведение массы груза-дисбаланса расстояние 1 0 = 70 мм центра груза от оси маховика). Дополнительный дисбаланс создается за счет погрешностей изготовления роликов и грузов. Мы им пренебрегаем. Значения массы маховика и грузов-дисбалансов приведены в перечне состава изделия. В общую массу катящейся системы дополнительно входят массы роликов и грузов. В положении устойчивого равновесия маховика на рельсах груз-дисбаланс находится под осью маховика (рисунок 2.4). На рисунке 2.3 маховик показан в "предстартовом" состоянии для измерения малого трения: он удерживается фиксатором вблизи положения неустойчивого равновесия.
Фиксатор (поз.4 на рисунке 2.3) позволяет удерживать маховик в начальном положении и отсчитывать угловые координаты маховика по шкале на диске маховика. Фиксатор содержит флажок 4.1, установленный на стойке 4.2 с возможностью поворота с заметным трением вокруг оси 4.3. Опуская флажок, прижимают его к диску маховика и тем самым фиксируют положение диска. Для фиксации положений равновесия на диске маховика имеются два паза, в которые опускается фиксатор.
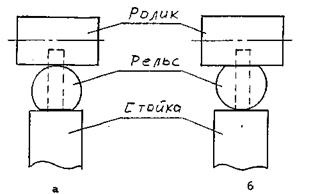
Рельсы (поз.5 на рисунке 2.3) имеют сечение в виде круга со снятым сегментом ("лыской"). Они надеваются на штыри стоек в двух положениях. При первом положении (рис.2.5а) качение ролика происходит по цилиндрической поверхности рельса. При втором положении рельса (рисунок 2.5б) ролик катится по плоской поверхности, а перекатывание цилиндрической поверхности рельса по торцу стойки автоматически обеспечивает прилегание поверхностей ролика и рельса.
|
Рисунок 2.5 – Положение рельс
В центральной части рельс имеется риска. Она нужна для предварительной установки маховика. Ось маховика устанавливают над риской, а ориентацию маховика фиксируют флажком, опущенным в паз диска маховика. Это позволяет установить маховик в положение неустойчивого равновесия с достаточной для большинства измерений точностью. Для прецизионных измерений требуется подстройка положения.
Грузы позволяют изменять полную массу катящейся системы.
Ролики из исследуемых материалов обеспечивают измерение коэффициента трения качения и изучение закономерностей трения качения.
3. Задание на выполнение
Цель работы: ознакомление с плоским движением тел и методами определения коэффициентов трения качения.
Измерение коэффициентов трения качения
1. Приготовить к работе лабораторную установку ЛКМ-9.
2. Занести в таблицу исходные данные в графы: «рельс», «ролик», «масса».
3. Измерить N,  ,
,  для каждой таблицы соответственно.
для каждой таблицы соответственно.
4. Полученные результаты занести в таблицу.
5. По формуле (3.5) рассчитать значение f.
6. Полученные результаты занести в таблицу.
Положение маховика определим углом  отклонения от положения неустойчивого равновесия(рисунок 3.1). Отпущенный из начального положения с отклонением , маховик будет кататься по рельсам, совершая вращательные колебания. После N колебаний маховик временно остановится в положении с угловой координатой , которую мы и зафиксируем, прижав флажок фиксатора к диску маховика.
отклонения от положения неустойчивого равновесия(рисунок 3.1). Отпущенный из начального положения с отклонением , маховик будет кататься по рельсам, совершая вращательные колебания. После N колебаний маховик временно остановится в положении с угловой координатой , которую мы и зафиксируем, прижав флажок фиксатора к диску маховика.
В процессе колебаний маховик пройдет "угловой путь"
 (3.1)
(3.1)
и потеряет энергию, определяемую дисбалансом ( 1 0) маховика:
 (3.2)
(3.2)
Момент сил сопротивления
 (3.3)
(3.3)
определит коэффициент f трения качения, равный отношению момента сил сопротивления к весу маховика:
 /
/  (3.4)
(3.4)
Если углы и малые, причем << , выражение (3.4) упрощается:
 (3.5)
(3.5)
Зависимость пропорциональная  позволяет регистрировать весьма малое трение. Сопротивление воздуха дает эффект в несколько раз меньший, чем наименьшее из исследуемых сопротивлений качению (сталь по стали).
позволяет регистрировать весьма малое трение. Сопротивление воздуха дает эффект в несколько раз меньший, чем наименьшее из исследуемых сопротивлений качению (сталь по стали).
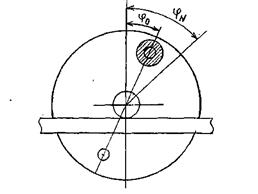
Рисунок 3.1 – К расчёту коэффициента трения
Таблица 3.1 – Зависимость коэффициента трения от нагрузки
| № | Рельс: положение, материал | Ролик: диаметр, материал | Масса груза, г | Масса общая m, г | N | ,
град
| , рад
| , град
| , рад
| f, мкм |
 сталь
сталь
| d=28 мм полир. сталь | |||||||||
|
сталь
| d=28 мм полир. сталь | |||||||||
|
сталь
| d=20 мм латунь | |||||||||
|
сталь
| d=20 мм латунь | |||||||||
|
сталь
| d=20 мм оксидиров. сталь | |||||||||
|
сталь
| d=20 мм оксидиров. сталь |
Таблица 3.2 – Зависимость коэффициента трения от формы поверхности
| № | Рельс: положение, материал | Ролик: диаметр, материал | Масса груза, г | Масса общая m, г | N | ,
град
| , рад
| , град
| , рад
| f, мкм |
 сталь
сталь
| d=14 мм сталь | |||||||||
 сталь
сталь
| d=14 мм сталь | |||||||||
|
сталь
| d=20 мм сталь | |||||||||
 сталь
сталь
| d=20 мм сталь | |||||||||
|
сталь
| d=20 мм Д16 | |||||||||
|
сталь
| d=20 мм Д16 |
Таблица 3.3 - Коэффициент трения различных материалов
| N: | Рельс: положение, материал | Ролик: диаметр, материал | Масса груза, г | Масса общая m, г | N | ,
град
| , рад
| , град
| , рад
| f, мкм |
|
сталь
| d=20 мм Д16 | |||||||||
 сталь
сталь
| d=28 мм сталь | |||||||||
|
сталь
| d=20 мм сталь | |||||||||
|
сталь
| d=20 мм латунь | |||||||||
|
текстолит
| d=20 мм сталь | |||||||||
|
текстолит
| d=20 мм Д16 |